一种沉降检测装置及检测方法
本发明涉及地质沉降检测的,具体而言,涉及一种沉降检测装置及检测方法。
背景技术:
1、随着城市地下工程(如地铁、地下管廊等)的迅猛发展,路基沉降成为施工过程以及完工后难以避免的安全问题。路基沉降轻则导致路面开裂、重则导致道路塌陷,将会带来安全隐患,甚至造成重大财产损失和人员伤亡,直接关系城市人民的安全。因此,为提高城市道路防灾减灾能力,做好路基沉降的检测和预警至关重要。随着无人机智能控制的迅速发展,利用无人机来对地面沉降进行检测也愈发地具有可操作性。
2、现有的无人机检测通常只是利用无人机进行巡航,对地面进行拍摄图片,然后利用图像分析系统比对图片,分析图片中的标志建筑及图像色差来识别位置变化,然而,导致路面塌陷的根本原因是地表硬化层下的土体受到施工等扰动所引起的沉降,由于地表硬化层形成的壳体结构,往往会导致路面沉降量不能完全反映路面下部土体的真实沉降量,对路面地基的实地检测的准确性较低。
技术实现思路
1、基于此,为了解决的问题,本发明提供了一种沉降检测装置及检测方法,其具体技术方案如下:
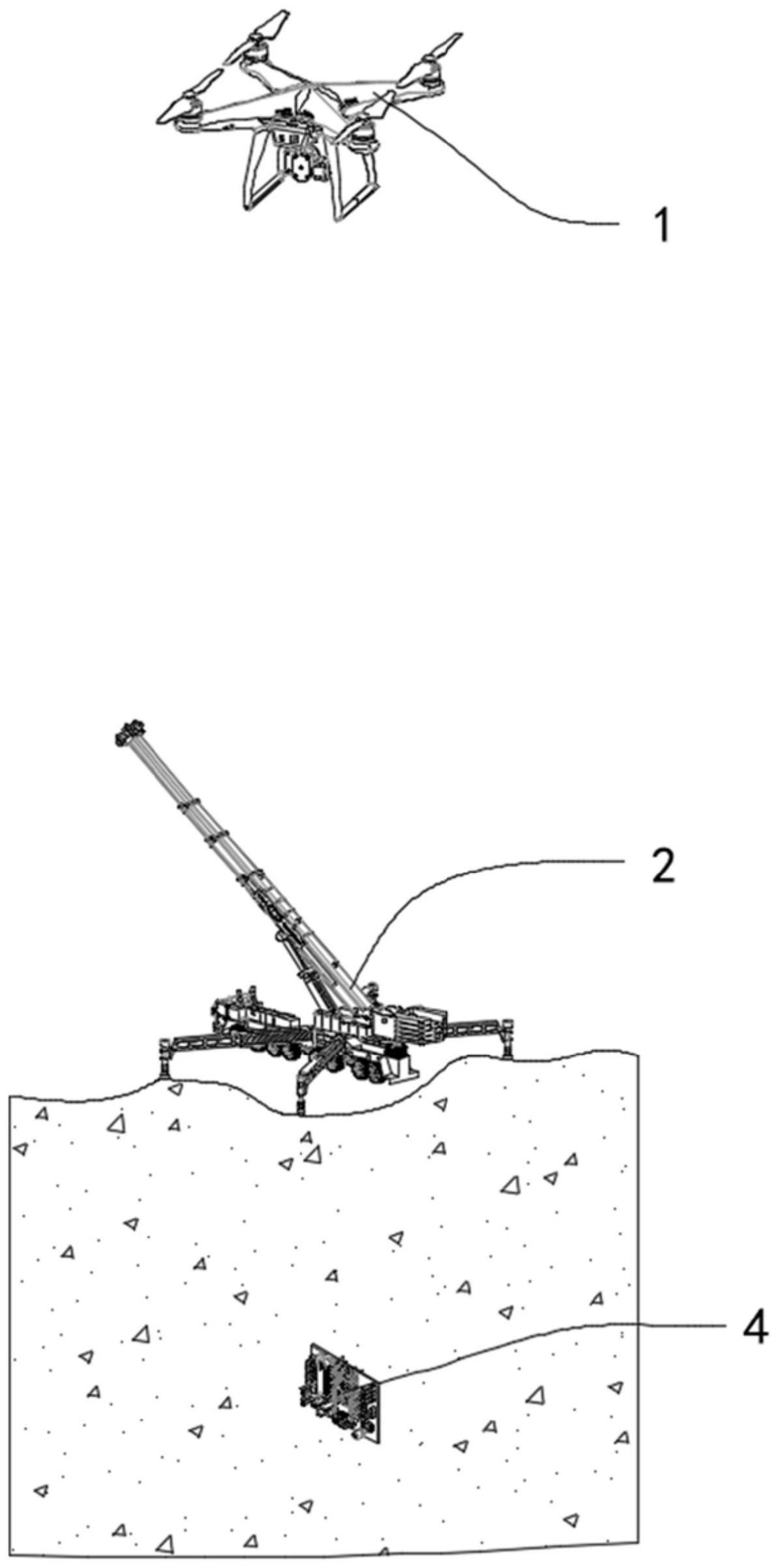
2、一方面,一种沉降检测装置,包括无人机和移动小车;所述无人机包括机体、设置在机体下部的挂载云台和装设于挂载云台的信号接收部件、定位部件;所述移动小车上设有信号发射部件;所述定位部件用于接收信号确定所述无人机的实时高度,所述信号发射部件用于发射位置信息到所述信号接收部件。
3、上述沉降检测装置利用无人机上的定位部件确定无人机的实时高度,利用信号发射部件发射位置信息到所述信号接收部件从而得到实时的高度差数据;同时,通过移动小车在路面进行移动,使无人机作为数据检测的基准点,无人机能够检测到移动小车在路面地基的实地移动而产生的高度差,从而提高沉降装置的检测准确性。
4、进一步地,所述移动小车包括定位支撑部件,所述定位支撑部件包括支臂组件,所述支臂组件包括若干支撑臂和设置在支撑臂末端的定位电动缸。
5、进一步地,还包括控制器,所述控制器用于转接信号接收部件接收到的位置信息并进行计算。
6、进一步地,所述沉降检测装置还包括沉降定位件,所述沉降定位件预埋在距离地表预定深度的路基内;所述移动小车上设有用于检测所述沉降定位件的检测器。
7、进一步地,所述沉降定位件为无源rfid标签,所述移动小车上设有rfid读写器;当所述移动小车靠近所述无源rfid标签时,所述无源rfid标签内的天线将接收到所述rfid读写器发出的电磁波能量,电磁波能量转化成电能从而激活所述无源rfid标签中的芯片,所述无源rfid标签中的芯片的数据发送到所述rfid读写器。
8、进一步地,所述移动小车包括天线伸出部件,所述天线伸出部件包括伸出杆组件和检测天线,所述检测天线设置在所述伸出杆组件的伸缩端。
9、另一方面,一种沉降检测方法,包括以下步骤:
10、s1、无人机升空,利用卫星系统确定无人机的空间位置;
11、s2、控制移动小车根据预设路线进行移动,到预设位置后发射信号;
12、其中,无人机底部设有激光测距仪,通过激光测距仪扫描移动小车,从而计算并记录无人机与移动小车的比对位置高度。
13、s21、在预设位置预埋沉降定位件,利用移动小车检测沉降定位件的预埋位置信息,所述预设位置为沉降定位件的正上方位置;
14、s22、通过将移动小车移动到沉降定位件的正上方后,计算沉降定位件与移动小车的竖直位置信息得到变化位置信息;
15、s23、移动小车将变化位置信息发送到无人机。
16、s3、无人机接受信号,计算并记录第一位置信息;
17、s4、重复步骤s1和s2、s3,计算并记录第二位置信息,比对第一位置信息与第二位置信息,计算出预设位置的升降数据。
18、s41、确定无人机空间位置信息为基准点h0;
19、记录预设位置的第一位置信息为h1、第二位置信息为hi;记录沉降定位件的预埋位置信息为y0、变化位置信息为yi,
20、s42、计算出预设位置的沉降位移量为δh=(h0-hi+yi)-(h0-h1+y0))。
技术特征:
1.一种沉降检测装置,其特征在于,包括无人机和移动小车;
2.根据权利要求1所述的一种沉降检测装置,其特征在于,所述移动小车包括定位支撑部件,所述定位支撑部件包括支臂组件,所述支臂组件包括若干支撑臂和设置在支撑臂末端的定位电动缸。
3.根据权利要求1所述的一种沉降检测装置,其特征在于,还包括控制器,所述控制器用于转接信号接收部件接收到的位置信息并进行计算。
4.根据权利要求1所述的一种沉降检测装置,其特征在于,所述沉降检测装置还包括沉降定位件,所述沉降定位件预埋在距离地表预定深度的路基内;
5.根据权利要求1所述的一种沉降检测装置,其特征在于,所述沉降定位件为无源rfid标签,所述移动小车上设有rfid读写器;
6.根据权利要求1所述的一种沉降检测装置,其特征在于,所述移动小车包括天线伸出部件,所述天线伸出部件包括伸出杆组件和检测天线,所述检测天线设置在所述伸出杆组件的伸缩端。
7.一种沉降检测方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种沉降检测方法,其特征在于,所述步骤s2包括以下步骤:
9.根据权利要求8所述的一种沉降检测方法,其特征在于,所述步骤s4,具体包括以下步骤:
10.根据权利要求7所述的一种沉降检测方法,其特征在于,无人机底部设有激光测距仪,通过激光测距仪扫描移动小车,从而计算并记录无人机与移动小车的比对位置高度。
技术总结
本发明提供了一种沉降检测装置及检测方法,其中检测装置包括无人机和移动小车;所述无人机包括机体、设置在机体下部的挂载云台和装设于挂载云台的信号接收部件、定位部件;所述移动小车上设有信号发射部件;所述定位部件用于接收信号确定所述无人机的实时高度,所述信号发射部件用于发射位置信息到所述信号接收部件。利用无人机上的定位部件确定无人机的实时高度,利用信号发射部件发射位置信息到所述信号接收部件从而得到实时的高度差数据;同时,通过移动小车在路面进行移动,使无人机作为数据检测的基准点,无人机能够检测到移动小车在路面地基的实地移动而产生的高度差,从而提高沉降装置的检测准确性。
技术研发人员:周波,高凡苗,杨建望,陈佳露,陈志煌
受保护的技术使用者:广州理工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!