一种视觉测量系统柔性自检调节装置及方法与流程
本发明提供了一种视觉测量系统柔性自检调节装置及方法,属于视觉测量系统。
背景技术:
1、视觉测量系统作为无接触测量的重要手段,需要依赖相机本身的参数才能实现较为准确的目标测量。视觉测量系统包括单目视觉测量系统、双目视觉测量系统和多目视觉测量系统,而单目视觉测量系统在测量时主要依赖单个相机本身的参数,即依赖前后帧图像进行深度和距离估计,不需要相机标定和调整。而双目视觉测量系统和多目视觉测量系统的测量效果除了依赖单个相机本身的参数,还受限于多相机之间的参数关系,对这种参数关系和获取的过程就是相机标定。
2、目前相机标定的处理手段较多,且一般是在视觉测量系统运行之前的静止情况下进行相机标定的,但是视觉测量系统运行之后,特别是户外使用的情况下,系统会存在轻微偏移和扭转,或者鉴于测量需要,系统需要进行移动和旋转等。这种情况下,单个相机本身的参数基本不变化,但是相机之间以及相机系统与世界坐标之间会发生较大变化,需要对标定结果进行自检和反馈,根据检定结果对视觉测量系统进行调整,保证视觉测量系统的准确度和可靠性。
3、基于标定板或相机运动进行标定或精度检测的手段属于刚性校准,需要经过复杂的标定或者高精度的运动控制系统,校准成本高,难度较大。
技术实现思路
1、本发明为了解决基于标定板或相机运动实现刚性校准成本高、难度大的问题,提出了一种视觉测量系统柔性自检调节装置及方法。
2、为了解决上述技术问题,本发明采用的技术方案为:一种视觉测量系统柔性自检调节装置,包括视觉测量系统、水平仪、重力传感器,所述视觉测量系统包括移动支架/载具和相机系统,所述相机系统包括导轨,所述导轨固定在移动支架/载具上,所述导轨上设置有至少两个滑台,每个滑台上均安装有增稳云台,滑台与滑台之间能够相向运动,所述增稳云台上固定有相机,所述移动支架/载具上设置有水平仪和重力传感器,所述移动支架/载具上固定有控制盒,所述控制盒上设置有开关,所述控制盒内设置有控制器、存储器,所述控制器通过导线分别与双向导轨的电机控制端、增稳云台控制端、相机、水平仪、重力传感器相连;
3、所述存储器上存储有对视觉测量系统进行柔性自检调节方法的计算机程序,所述控制器用于执行上述计算机程序,上述计算机程序包括图像处理模块和比对自检模块,所述图像处理模块用于对相机采集的图像中的畸变和模糊进行处理,所述比对自检模块用于实现移动支架/载具偏移检测和图像检测比对,所述比对自检模块中存储有初始刚性标定后的参数作为下一次自检的输入。
4、所述比对自检模块根据水平仪和重力传感器两者方向的夹角确定移动支架/载具是否需要调节,根据多个相机拍摄的目标的融合视图中目标中心线与重力传感器方向之间的角度,确定增稳云台的旋转状态。
5、所述移动支架/载具具体采用三脚支架;
6、所述增稳云台能够调节相机的水平旋转角度和俯仰角度。
7、一种视觉测量系统柔性自检调节方法,采用视觉测量系统柔性自检调节装置,包括如下步骤:
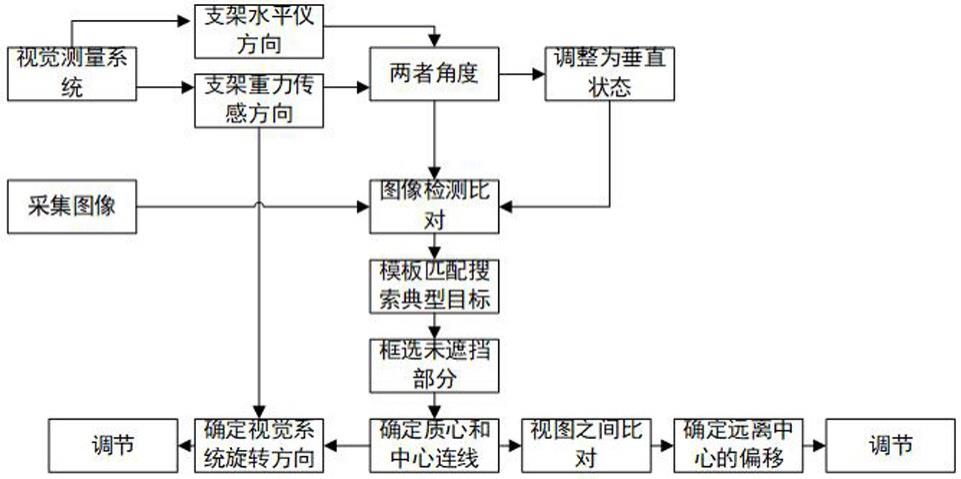
8、s1:视觉测量系统按照设定频率进行图像采集,首先通过水平仪和重力传感器两者方向的角度比对,确定移动支架/载具的偏移量,当水平仪与重力传感器的角度为直角时,进入步骤s2,当水平仪与重力传感器的角度不为直角时,通过调整移动支架/载具使水平仪与重力传感器的角度为直角,即调整移动支架/载具为水平的平面;
9、s2:基于图像进行导轨和增稳云台的调节:采集同一时刻下多个相机不同视图的图像中的目标,分别确定每个视图中目标的质心和中心线,根据每个视图中目标的中心线确定单个相机的增稳云台需要调节的角度,通过每两个视图中目标的质心之间的距离确定两个相机之间的偏移状态。
10、在进行所述步骤s1之前先对每个相机的视图进行初始刚性标定,得到初始的标定参数,所述标定参数包括两两相机之间的距离、单个相机视图中目标的质心和中心线。
11、所述步骤s2中采集同一时刻下多个相机不同视图的图像中的目标通过模板匹配的方式实现,找到典型目标,计算目标非遮挡部分的像素宽度和像素高度,在目标像素高度范围内不同高度处确定该高度下的质心,确定至少2个高度处的质心,将质心相连得到目标的中心线。
12、结合初始标定时得到的标定参数,计算并比对两个相机不同视图中质心位置和中心线的位置,同一目标不同视图的中心线为平行状态,不同视图下目标的质心位置应距离对应视图中心线的距离差不大于0.2倍图像宽度,根据阈值限制进行两个相机之间偏移和单个相机旋转状态的调整。
13、所述步骤s2中具体通过比对融合视图中目标中心线与重力传感器方向之间的角度,判断视觉系统的旋转调节角度,其中融合视图是两个相机不同视图的匹配结果,融合视图中包含目标的空间信息,计算目标的中心线与重力传感器方向存在角度偏差,根据角度偏差应为0的限制条件,进行视觉系统旋转的调节。
14、在进行相机视图的初始标定时,还会获取图像的畸变参数,根据畸变参数对图像进行处理后再解算图像中目标的质心和中心线。
15、本发明相对于现有技术具备的有益效果为:本发明通过机架偏移对比和图像检测比对,进行视觉测量系统的柔性自检,标定复杂度较低,同时降低了对高精度自标定运动控制平台的需求。
技术特征:
1.一种视觉测量系统柔性自检调节装置,其特征在于:包括视觉测量系统、水平仪、重力传感器,所述视觉测量系统包括移动支架/载具和相机系统,所述相机系统包括导轨,所述导轨固定在移动支架/载具上,所述导轨上设置有至少两个滑台,每个滑台上均安装有增稳云台,滑台与滑台之间能够相向运动,所述增稳云台上固定有相机,所述移动支架/载具上设置有水平仪和重力传感器,所述移动支架/载具上固定有控制盒,所述控制盒上设置有开关,所述控制盒内设置有控制器、存储器,所述控制器通过导线分别与双向导轨的电机控制端、增稳云台控制端、相机、水平仪、重力传感器相连;
2.根据权利要求1所述的一种视觉测量系统柔性自检调节装置,其特征在于:所述比对自检模块根据水平仪和重力传感器两者方向的夹角确定移动支架/载具是否需要调节,根据多个相机拍摄的目标的融合视图中目标中心线与重力传感器方向之间的角度,确定增稳云台的旋转状态。
3.根据权利要求1所述的一种视觉测量系统柔性自检调节装置,其特征在于:所述移动支架/载具具体采用三脚支架;
4.一种视觉测量系统柔性自检调节方法,采用如权利要求1-3任一项所述的视觉测量系统柔性自检调节装置,其特征在于:包括如下步骤:
5.根据权利要求4所述的一种视觉测量系统柔性自检调节方法,其特征在于:在进行所述步骤s1之前先对每个相机的视图进行初始刚性标定,得到初始的标定参数,所述标定参数包括两两相机之间的距离、单个相机视图中目标的质心和中心线。
6.根据权利要求5所述的一种视觉测量系统柔性自检调节方法,其特征在于:所述步骤s2中采集同一时刻下多个相机不同视图的图像中的目标通过模板匹配的方式实现,找到典型目标,计算目标非遮挡部分的像素宽度和像素高度,在目标像素高度范围内不同高度处确定该高度下的质心,确定至少2个高度处的质心,将质心相连得到目标的中心线。
7.根据权利要求6所述的一种视觉测量系统柔性自检调节方法,其特征在于:结合初始标定时得到的标定参数,计算并比对两个相机不同视图中质心位置和中心线的位置,同一目标不同视图的中心线为平行状态,不同视图下目标的质心位置应距离对应视图中心线的距离差不大于0.2倍图像宽度,根据阈值限制进行两个相机之间偏移和单个相机旋转状态的调整。
8.根据权利要求7所述的一种视觉测量系统柔性自检调节方法,其特征在于:所述步骤s2中具体通过比对融合视图中目标中心线与重力传感器方向之间的角度,判断视觉系统的旋转调节角度,其中融合视图是两个相机不同视图的匹配结果,融合视图中包含目标的空间信息,计算目标的中心线与重力传感器方向存在角度偏差,根据角度偏差应为0的限制条件,进行视觉系统旋转的调节。
9.根据权利要求8所述的一种视觉测量系统柔性自检调节方法,其特征在于:在进行相机视图的初始标定时,还会获取图像的畸变参数,根据畸变参数对图像进行处理后再解算图像中目标的质心和中心线。
技术总结
本发明提供了一种视觉测量系统柔性自检调节装置及方法,属于视觉测量系统技术领域;解决了基于标定板或相机运动实现刚性校准成本高、难度大的问题;包括视觉测量系统、水平仪、重力传感器,视觉测量系统包括移动支架/载具和相机系统,移动支架/载具上固定有控制盒,控制盒内设置有控制器、存储器,存储器上存储有对视觉测量系统进行柔性自检调节方法的计算机程序,控制器用于执行上述计算机程序,上述计算机程序包括图像处理模块和比对自检模块,图像处理模块用于对相机采集的图像中的畸变和模糊进行处理,比对自检模块用于实现移动支架/载具偏移检测和图像检测比对;本发明应用于视觉测量系统自检调节。
技术研发人员:张娜,俞华,原辉,范晶晶,何壮壮,赵金
受保护的技术使用者:国网山西省电力公司电力科学研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!