一种平台式以及旋转调制捷联式异构惯导定位增强方法与流程
本发明涉及多惯导信息融合,具体涉及一种平台式以及旋转调制捷联式异构惯导定位增强方法。
背景技术:
1、惯导设备按照工作方式的不同,可分为平台式惯导及捷联式惯导两大类。平台式惯导主要通过机械平台将三轴陀螺、加速度计传感器稳定在惯性或其他导航坐标系内,通过将传感器测量数据换算至地理坐标系实现载体位置、速度及姿态等导航信息解算;捷联式惯导主要将三轴陀螺、加速度计传感器直接固连在载体上,通过构建数学平台,将传感器测量数据换算至地理坐标系实现载体位置、速度及姿态等导航信息解算,在实际工程实现中,为进一步提高捷联惯导精度,一般会在惯导中增加旋转调制机构,通过对称多方位调制实现惯导常值误差抵消。
2、根据惯导工作原理,定位误差主要包括由陀螺漂移激励的随时间发散误差及由初始对准误差激励的周期振荡项误差两部分,由于工作方式的不同,平台式及旋转调制捷联式惯导定位误差特性会存在较大差异。对于平台式惯导而言,由于陀螺漂移无法消除,而初始对准误差可通过光描修正等手段有效抑制,因此定位误差主要呈现出随时间发散特性,周期振荡幅值相对较小;而对于旋转调制捷联式惯导而言,通过旋转调制可有效抵消陀螺漂移等常值误差影响,同时也会引入轴系安装偏差等新的误差项,因此定位误差呈现出随时间发散较小,而周期振荡幅值较大的特性。
3、一般的导航系统一般仅配置有平台式惯导或者调制捷联式惯导二者中的一种,若在同一导航系统中配置两种不同机制惯导,由于没有有效的抑制抵消误差的方法,无法实现二者的定位增强。
技术实现思路
1、有鉴于此,本发明提供了一种平台式以及旋转调制捷联式异构惯导定位增强方法,能够实现平台式惯导周期振荡误差及旋转调制捷联式惯导时间发散误差的有效组合,从而能够得到两型惯导定位增强输出,达到提高平台式/旋转调制捷联式异构惯导综合定位精度的目的。
2、为达到上述目的,本发明提供的一种平台式以及旋转调制捷联式异构惯导定位增强方法,用于在配置两型惯导的导航系统进行定位增强,所述两型惯导包括平台式惯导和旋转调制捷联式惯导,具体方案包括如下步骤:
3、步骤一:通过同一时间基准设备向两型惯导分别输出时间同步信息,两型惯导利用外部时间基准完成时间同步,并在输出经度、纬度信息中标示时间戳信息。
4、步骤二:两型惯导正常工作,输出经度、纬度定位信息,正常运行设定时间之后,每间隔设定的时间步计算一次两型惯导的经度差和纬度差。
5、步骤三:对经度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理;对纬度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理。
6、步骤五:分别利用平台式惯导的经度、纬度信息减去地球振荡周期滑动平均处理后的经度差、纬度差误差,得到融合后的经度、纬度信息。
7、进一步地,时间同步信息包括tod和秒脉冲。
8、进一步地,每间隔设定的时间步计算一次两型惯导的经度差和纬度差,具体为:
9、每隔一秒计算一次两型惯导的经度差和纬度差,公式为其中δλk为第k秒两型惯导经度差,λ1k为第k秒平台式惯导经度,λ2k为第k秒旋转调制捷联式惯导经度;为第k秒两型惯导纬度差,为第k秒平台式惯导纬度,为第k秒旋转调制捷联式惯导纬度。
10、进一步地,经度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理,具体为:
11、
12、
13、其中δλm′为第m秒舒拉振荡周期滑动平均处理后的经度差,t1为舒拉振荡周期;δλi″为第i秒地球振荡周期滑动平均处理后的经度差,t2为地球振荡周期。
14、进一步地,对纬度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理,具体为:
15、
16、
17、其中为第m秒舒拉振荡周期滑动平均处理后的纬度差;为第i秒地球振荡周期滑动平均处理后的纬度差,t1为舒拉振荡周期,t2为地球振荡周期。
18、进一步地,分别利用平台式惯导的经度、纬度信息减去地球振荡周期滑动平均处理后的经度差、纬度差误差,得到融合后的经度、纬度信息,具体为:λk=λ1k-δλk″;λk为第k秒融合后的经度信息,为第k秒融合后的纬度信息。
19、有益效果:
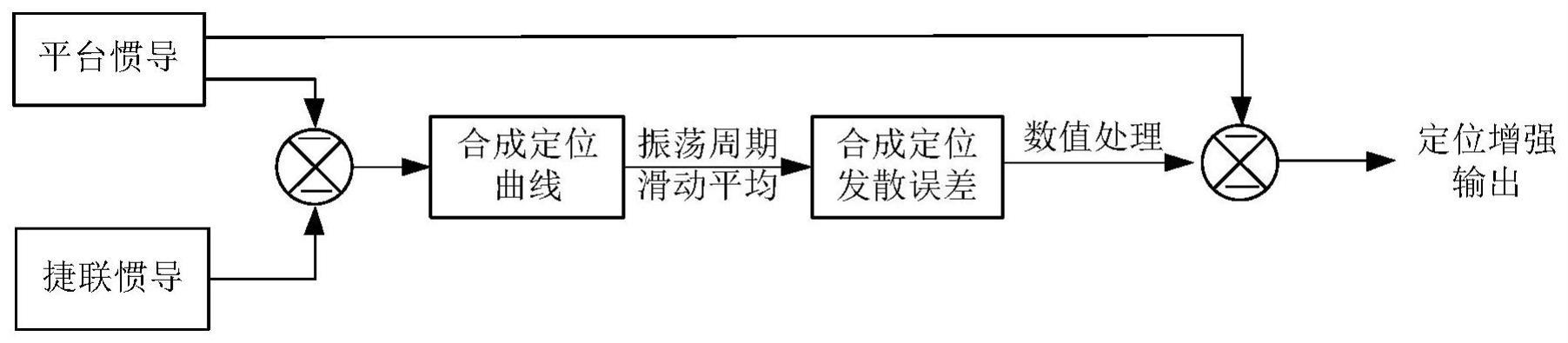
20、本发明针对平台式/旋转调制捷联式异构惯导定位误差特性的差异性,通过两型惯导位置信息相减,消除载体运动信息干扰;再分别通过舒拉振荡周期、地球振荡周期滑动平均处理,消除舒拉周期振荡及地球周期振荡影响,得到两型惯导定位发散误差差异值,最后利用平台式惯导定位信息减去定位发散误差差异值,得到融合后的定位增强信息。相对于平台式、旋转调制捷联式惯导单独定位精度,该方法实现了平台式惯导周期振荡误差及旋转调制捷联式惯导时间发散误差的有效组合,从而能够得到两型惯导定位增强输出,达到提高平台式/旋转调制捷联式异构惯导综合定位精度的目的。
技术特征:
1.一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,用于在配置两型惯导的导航系统进行定位增强,所述两型惯导包括平台式惯导和旋转调制捷联式惯导,具体包括如下步骤:
2.如权利要求1所述的一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,所述时间同步信息包括tod和秒脉冲。
3.如权利要求1所述的一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,所述每间隔设定的时间步计算一次两型惯导的经度差和纬度差,具体为:
4.如权利要求3所述的一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,所述经度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理,具体为:
5.如权利要求4所述的一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,所述对纬度差依次进行舒拉振荡周期以及地球振荡周期的滑动平均处理,具体为:
6.如权利要求5所述的一种平台式以及旋转调制捷联式异构惯导定位增强方法,其特征在于,所述分别利用平台式惯导的经度、纬度信息减去地球振荡周期滑动平均处理后的经度差、纬度差误差,得到融合后的经度、纬度信息,具体为:λk=λ1k-δλk″;λk为第k秒融合后的经度信息,为第k秒融合后的纬度信息。
技术总结
本发明公开了一种平台式以及旋转调制捷联式异构惯导定位增强方法,涉及多惯导信息融合技术领域。本发明在两型惯导经度、纬度定位信息输出基础上,进行时间同步后,通过定位信息相减,得到经度差、纬度差,消除载体运动信息干扰;再对经度差、纬度差分别进行地球振荡周期(24小时)、舒拉振荡周期(84.4分钟)滑动平均处理,得到合成经度、纬度发散误差,实现发散误差与振荡误差的分离;最后利用平台式惯导定位信息减去合成位置发散误差,得到融合后的定位增强信息,实现平台式惯导周期振荡误差及旋转调制捷联式惯导时间发散误差的结合,有效提高异构惯导定位能力。
技术研发人员:杨建,王亚波,杨宗元,罗涛
受保护的技术使用者:中国船舶集团有限公司第七一九研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!