一种AGV智能搬运机器人锂电池安全监测系统及其容量计算优化方法
本发明涉及智能机器人,具体涉及一种agv智能搬运机器人锂电池安全监测系统及其容量计算优化方法。
背景技术:
1、agv智能搬运机器人是一种以电池为动力,装有非接触导向装置的无人驾驶自动化搬运车辆。这一运输装载工具可以通过特定的导航系统在固定的场地按照设置的路线完成货物的搬运。此外,该小车可以凭借车四周所配备的range scanner,确定货物或障碍物的位置,从而保证运输过程中的安全性。
2、然而,目前这类机器人在使用过程中,其所呈现的功能呈多元且智能化,但对于其配载的电池,并未设有安全监控的功能,从而机器人在日常执行搬运工作过程中,由于配载电池所引发的故障往往不易被发现。
技术实现思路
1、解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种agv智能搬运机器人锂电池安全监测系统及其容量计算优化方法,解决了上述背景技术中提出的技术问题。
3、技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、第一方面,一种agv智能搬运机器人锂电池安全监测系统,包括:
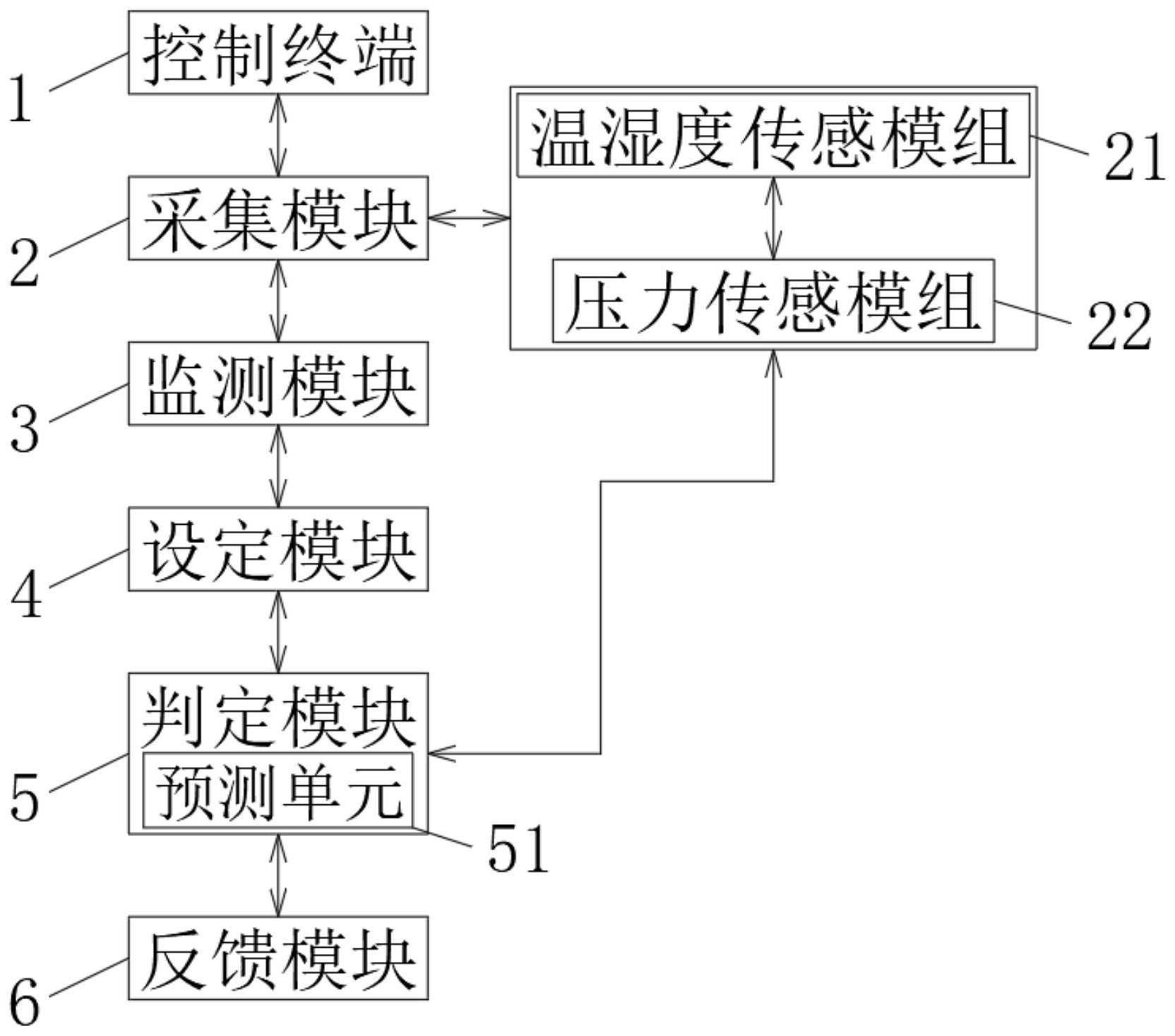
6、控制终端,是系统的主控端,用于发出执行命令;
7、采集模块,用于采集机器人电池的状态数据;
8、监测模块,用于监测机器人电池与机器人上各驱动模组相互间电力供输线路状态;
9、设定模块,用于设定机器人电池的状态数据安全阈值;
10、判定模块,用于接收采集模块采集到的机器人电池的状态数据及设定模块中设定的机器人电池的状态数据安全阈值,判定机器人电池的状态数据是否处于状态数据安全阈值范围内;
11、反馈模块,用于实时获取判定模块中判定结果数据,对判定结果数据执行向控制终端发送的操作;
12、其中,系统端用户于控制终端上对反馈模块反馈的判定模块判定结果数据进行读取。
13、更进一步地,所述采集模块下级设置有子模块,包括:
14、温湿度传感模组,用于监测机器人电池安装环境的实时温度参数及湿度参数;
15、压力传感模组,用于监测机器人电池表面的实时压力参数;
16、其中,温湿度传感模组及压力传感模组均通过系统端用户手动设定有运行周期,根据系统端用户手动设定的运行周期实时运行。
17、更进一步地,所述压力传感器模组选用柔性压力传感器所集成。
18、更进一步地,所述温湿度传感模组及压力传感模组设置有若干组,若干组所述温湿度传感模组及压力传感模组均等距分布在机器人电池周边及表面;
19、其中,机器人电池表面用于部署压力传感模组,机器人电池周边用于部署温湿度传感模组,温湿度传感模组与压力传感模组呈相互交错状分布,温湿度传感模组及压力传感模组运行监测到的参数数据根据系统端用户手动设定的运行周期实时向采集模块发送。
20、更进一步地,所述监测模块通过介质电性与机器人电池相连接,监测模块于系统运行状态下持续运行,监测模块监测到机器人电池与机器人上各驱动模组相互间电力供输线路状态为通路时,触发采集模块运行,采集模块下级的温湿度传感模组及压力传感模组根据运行周期持续运行,反之,监测模块监测到机器人电池与机器人上各驱动模组相互间电力供输线路状态为断路时,监测模块继续运行;
21、其中,电力供输线路状态包括:放电、蓄电、短路,电力供输线路的放电、蓄电状态均记作通路状态。
22、更进一步地,所述设定模块中设定的机器人电池的状态数据安全阈值根据电力供输线路状态进行区别设定。
23、更进一步地,所述判定模块在判定到任意一组机器人电池的状态数据不处于状态数据安全阈值时,触发控制机器人电池与机器人上各驱动模组间连接断开;
24、其中,判定模块内部设置有子模块,包括;
25、预测单元,用于接收判定模块判定结果,应用判定模块判定结果数据求取机器人电池使用风险概率。
26、更进一步地,所述机器人电池使用风险概率通过下式进行求取,公式为;
27、k=∑[(s0·p1)+(m0·p2)+(e0·p3)/g+k0·ω];
28、式中:s0为电池温度距离安全阈值最近边界的差值;m0为电池湿度距离安全阈值最近边界的差值;e0为电池周边部署压力传感模组采集到的压力数值距离安全阈值最近边界的差值;p1、p2、p3及ω为权重;g为变量参数应用数量;k0为上一次运算求取到的机器人电池使用风险概率;
29、其中,预测单元预测到的机器人电池使用风险概率同步通过反馈模块向控制终端发送。
30、更进一步地,所述控制终端通过介质电性连接有采集模块,所述采集模块下级通过无线网络连接有温湿度传感模组及压力传感模组,所述采集模块通过介质电性连接有监测模块、设定模块及判定模块,所述判定模块内部通过介质电性连接有预测单元,所述预测模块通过介质电性与温湿度传感模组及压力传感模组相连接,所述判定模块通过介质电性与反馈模块相连接。
31、第二方面,一种agv智能搬运机器人锂电池容量计算优化方法,包括以下步骤:
32、步骤1:获取机器人电池标准容量参数及机器人上各驱动模组运行参数;
33、步骤2:根据机器人上各驱动模组运行参数设定电力供输损耗值;
34、步骤3:基于机器人上运行驱动模组的运行参数、运行时间及设定的电力供输损耗值计算机器人实时剩余soc;
35、步骤4:构建云端数据库,应用构建的云端数据库储存步骤3中计算得到的机器人实时剩余soc;
36、步骤5:遍历读取云端数据库中储存的机器人实时剩余soc,分析机器人电池容量消耗效率。
37、有益效果
38、采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
39、1、本发明提供一种agv智能搬运机器人锂电池安全监测系统,通过该系统中模块的运行,能够对机器人的电池运行参数进行全面采集,并进一步采用设定阈值的方式对电池运行参数进行了安全判定,更进一步的基于判定结果实现了机器人电池运行风险预测,为机器人电池的日常运行带来较为完善的安全监护效果。
40、2、本发明中系统采用柔性压力传感模组来实现机器人电池周边压力数据的获取,其获取结果较为全面,且能够针对于机器人电池局部鼓包的情况进行使用,电池贴合效果较佳。
41、3、本发明提供一种agv智能搬运机器人锂电池容量计算优化方法,通过该方法中的步骤执行进一步维护了系统运行的稳定,且进一步提供了机器人电池容量的计算方法,以便于机器人用户能够更加全面了解机器人的电池运行参数数据。
技术特征:
1.一种agv智能搬运机器人锂电池安全监测系统,其特征在于,包括:
2.根据权利要求1所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述采集模块(2)下级设置有子模块,包括:
3.根据权利要求2所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述压力传感器模组(22)选用柔性压力传感器所集成。
4.根据权利要求2所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述温湿度传感模组(21)及压力传感模组(22)设置有若干组,若干组所述温湿度传感模组(21)及压力传感模组(22)均等距分布在机器人电池周边及表面;
5.根据权利要求1或2所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述监测模块(3)通过介质电性与机器人电池相连接,监测模块(3)于系统运行状态下持续运行,监测模块(3)监测到机器人电池与机器人上各驱动模组相互间电力供输线路状态为通路时,触发采集模块(2)运行,采集模块(2)下级的温湿度传感模组(21)及压力传感模组(22)根据运行周期持续运行,反之,监测模块(3)监测到机器人电池与机器人上各驱动模组相互间电力供输线路状态为断路时,监测模块(3)继续运行;
6.根据权利要求1所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述设定模块(4)中设定的机器人电池的状态数据安全阈值根据电力供输线路状态进行区别设定。
7.根据权利要求1所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述判定模块(5)在判定到任意一组机器人电池的状态数据不处于状态数据安全阈值时,触发控制机器人电池与机器人上各驱动模组间连接断开;
8.根据权利要求7所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述机器人电池使用风险概率通过下式进行求取,公式为;
9.根据权利要求1所述的一种agv智能搬运机器人锂电池安全监测系统,其特征在于,所述控制终端(1)通过介质电性连接有采集模块(2),所述采集模块(2)下级通过无线网络连接有温湿度传感模组(21)及压力传感模组(22),所述采集模块(2)通过介质电性连接有监测模块(3)、设定模块(4)及判定模块(5),所述判定模块(5)内部通过介质电性连接有预测单元(51),所述预测模块(51)通过介质电性与温湿度传感模组(21)及压力传感模组(22)相连接,所述判定模块(5)通过介质电性与反馈模块(6)相连接。
10.一种agv智能搬运机器人锂电池容量计算优化方法,所述方法是对如权利要求1-9中任意一项所述一种agv智能搬运机器人锂电池安全监测系统的实施方法,其特征在于,包括以下步骤:
技术总结
本发明涉及智能机器人技术领域,具体涉及一种AGV智能搬运机器人锂电池安全监测系统及其容量计算优化方法,包括:控制终端,是系统的主控端,用于发出执行命令;采集模块,用于采集机器人电池的状态数据;监测模块,用于监测机器人电池与机器人上各驱动模组相互间电力供输线路状态;设定模块,用于设定机器人电池的状态数据安全阈值;本发明通过该系统中模块的运行,能够对机器人的电池运行参数进行全面采集,并进一步采用设定阈值的方式对电池运行参数进行了安全判定,更进一步的基于判定结果实现了机器人电池运行风险预测,为机器人电池的日常运行带来较为完善的安全监护效果。
技术研发人员:李小燕,谭汉洪,王丹
受保护的技术使用者:广东科技学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!