机电式转子陀螺的位置检测系统及方法与流程
本发明涉及机电式转子陀螺,特别地,涉及一种机电式转子陀螺的位置检测系统及方法。
背景技术:
1、具有定轴性和进动性两大动力特性的机电式转子陀螺在航空、航天、航海领域发挥着重要作用,其用途之一是将陀螺转子安装在内环和外环构成的平台框架上,共同组成陀螺稳定平台,既可以在高速旋转的陀螺转子上安装光学系统和探测器等高精度测量仪表来探测感兴趣的目标,也可以检测陀螺转子和框架平台的转角误差作为产品姿态电子控制系统的输入,用于控制陀螺稳定平台以及所在产品的姿态。目前,机电式转子陀螺的常见驱动方案是在陀螺转子上安装永磁体,在平台框架内环上的陀螺定子部分则安装几组旋转线圈,通过给旋转线圈通交流电并按照陀螺转子旋转位置进行电流换相,从而驱动永磁体带动陀螺转子高速旋转,基本原理类似于同步电机。但是,其特殊之处是陀螺转子和定子间通过万向节连接,陀螺转子在高速旋转的同时仍可以根据定轴性维持自转轴指向方向不变,或者在外力矩作用下陀螺转子自转轴向目标方位进动。因此,在电机转轴上安装光电编码器、霍尔开关或者旋转变压器检测电机位置并用于电机控制的传统方法则不再适用机电式转子陀螺,故而需要针对机电式转子陀螺的特性设计一种新的位置检测方法。同时,当平台框架随产品发生姿态改变而陀螺转子仍继续维持定轴旋转,或者陀螺转子在外力矩作用下发生进动,这两种场景下陀螺转子和平台框架之间的偏转角度误差会发生改变,而现有技术中无法准确测量陀螺转子和平台框架之间的偏转角度误差。
技术实现思路
1、本发明提供了一种机电式转子陀螺的位置检测系统及方法,以解决现有技术无法准确检测机电式转子陀螺的转子位置的技术问题。
2、根据本发明的一个方面,提供一种机电式转子陀螺的位置检测系统,包括:
3、位置反射环,设置在陀螺转子的外表面上,位置反射环包括具有高反射系数的亮面和具有低反射系数的暗面;
4、多个反射式光耦,安装在陀螺定子上,用于在陀螺转子旋转和进动过程中检测位置反射环上亮面和暗面的变化;
5、信号处理装置,用于获取反射式光耦的输出信号并对其进行信号处理,根据位置反射环上亮面和暗面的变化得到陀螺转子的旋转位置和陀螺转子与陀螺定子之间的偏转角度。
6、进一步地,所述位置反射环的上半部分包括各占50%的亮面和暗面,亮面和暗面的形状均为矩形,且亮面和暗面的分界线与陀螺转子永磁体的n极方向一致或者存在固定夹角。
7、进一步地,当陀螺定子上的旋转线圈为两组时,陀螺定子上间隔90°安装有两个第一反射式光耦,当陀螺定子上的旋转线圈为三组时,陀螺定子上间隔120°安装有三个第一反射式光耦,所述第一反射式光耦用于在陀螺转子旋转和进动时检测位置反射环上半部分亮面和暗面的变化。
8、进一步地,所述信号处理装置包括滞回比较器、反相器、fpga芯片和处理器,第一反射式光耦的输出信号经过滞回比较器和反相器的整形滤波处理后转换为基准信号,基准信号再经fpga芯片进行处理后,得到每个基准信号的实时电平状态、周期、占空比和基准信号之间的相位差,处理器基于基准信号的实时电平状态确定陀螺转子起转前的静态位置并输出正确的起转驱动信号,根据基准信号的电平变化及时控制旋转线圈内的电流换相,根据基准信号的周期、占空比和相位闭环控制陀螺转子的转速。
9、进一步地,当陀螺转子和陀螺定子的偏转角度为0°时,第一反射式光耦发射和反射光线的区域应落在位置反射环上半部分的中心点,且当陀螺转子和陀螺定子间的角度发生偏转后,第一反射式光耦发射和反射光线的区域应始终落在位置反射环的上半部分内。
10、进一步地,所述位置反射环的下半部分均匀分为多个矩形区域,每个矩形区域由一个亮面直角三角形和一个暗面直角三角形组成。
11、进一步地,陀螺定子上间隔90°安装有两个第二反射式光耦,用于在陀螺转子旋转和进动时检测位置反射环下半部分亮面和暗面的变化。
12、进一步地,所述信号处理装置包括滞回比较器、反相器、fpga芯片和处理器,两个第二反射式光耦的输出信号经过滞回比较器和反相器的整形滤波处理后转换为两个误差信号,两个误差信号再经fpga芯片进行处理后,得到每误差信号的占空比,处理器基于两个误差信号的占空比测量结果进行线性转换为陀螺转子当前时刻分别向两个反射式光耦偏转的角度,从而得到陀螺转子与陀螺定子之间的偏转角度。
13、进一步地,当陀螺转子和陀螺定子的偏转角度为0°时,第二反射式光耦发射和反射光线的区域应落在位置反射环下半部分的中心点,且当陀螺转子和陀螺定子间的角度发生偏转后,第二反射式光耦发射和反射光线的区域应始终落在位置反射环的下半部分内。
14、另外,本发明还提供一种机电式转子陀螺的位置检测方法,采用如上所述的位置检测系统,包括以下内容:
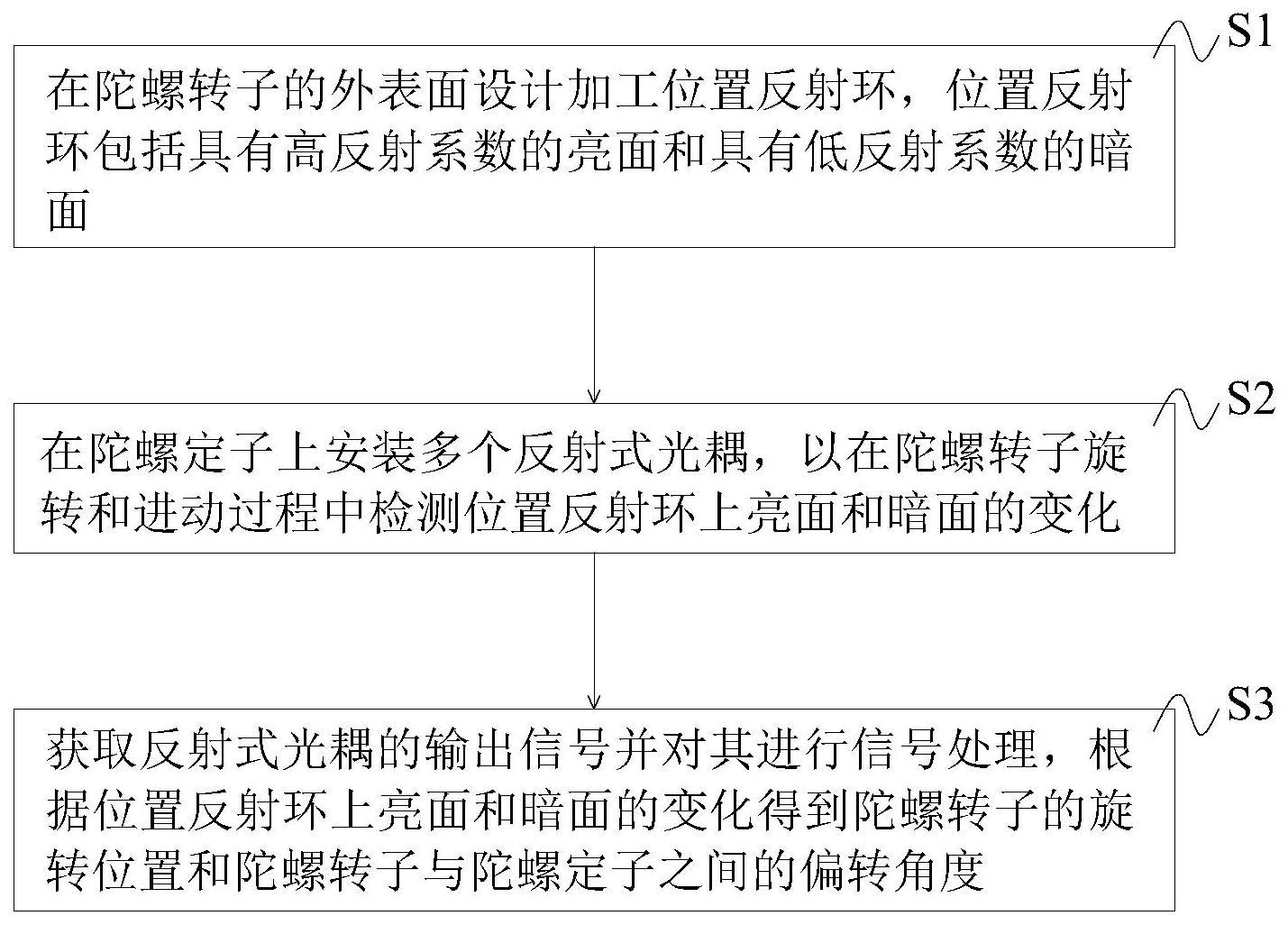
15、在陀螺转子的外表面设计加工位置反射环,位置反射环包括具有高反射系数的亮面和具有低反射系数的暗面;
16、在陀螺定子上安装多个反射式光耦,以在陀螺转子旋转和进动过程中检测位置反射环上亮面和暗面的变化;
17、获取反射式光耦的输出信号并对其进行信号处理,根据位置反射环上亮面和暗面的变化得到陀螺转子的旋转位置和陀螺转子与陀螺定子之间的偏转角度。
18、本发明具有以下效果:
19、本发明的机电式转子陀螺的位置检测系统,通过在陀螺转子的外表面上设计由亮面和暗面组成的位置反射环,并在陀螺定子上安装多个反射式光耦,以在陀螺转子旋转和进动过程中检测位置反射环上亮面和暗面的变化,最后通过信号处理装置对反射式光耦的输出信号进行信号处理,根据位置反射环上亮面和暗面的变化得到陀螺转子的旋转位置和陀螺转子与陀螺定子之间的偏转角度,利用了陀螺转子旋转过程中外表面的明暗变化来分别反映陀螺转子的旋转位置和偏转角度,即使陀螺转子和陀螺定子间的偏转角度变化时,仍然能准确测量陀螺转子的旋转位置,为陀螺起转控制、陀螺旋转控制、陀螺进动控制、平台框架内环和外环偏转角度控制提供了关键输入信号,并且具有安装简单、占用体积小、不受电磁干扰影响、测量精度高的优点。
20、另外,本发明的机电式转子陀螺的位置检测方法同样具有上述优点。
21、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
技术特征:
1.一种机电式转子陀螺的位置检测系统,其特征在于,包括:
2.如权利要求1所述的机电式转子陀螺的位置检测系统,其特征在于,所述位置反射环的上半部分包括各占50%的亮面和暗面,亮面和暗面的形状均为矩形,且亮面和暗面的分界线与陀螺转子永磁体的n极方向一致或者存在固定夹角。
3.如权利要求2所述的机电式转子陀螺的位置检测系统,其特征在于,当陀螺定子上的旋转线圈为两组时,陀螺定子上间隔90°安装有两个第一反射式光耦,当陀螺定子上的旋转线圈为三组时,陀螺定子上间隔120°安装有三个第一反射式光耦,所述第一反射式光耦用于在陀螺转子旋转和进动时检测位置反射环上半部分亮面和暗面的变化。
4.如权利要求3所述的机电式转子陀螺的位置检测系统,其特征在于,所述信号处理装置包括滞回比较器、反相器、fpga芯片和处理器,第一反射式光耦的输出信号经过滞回比较器和反相器的整形滤波处理后转换为基准信号,基准信号再经fpga芯片进行处理后,得到每个基准信号的实时电平状态、周期、占空比和基准信号之间的相位差,处理器基于基准信号的实时电平状态确定陀螺转子起转前的静态位置并输出正确的起转驱动信号,根据基准信号的电平变化及时控制旋转线圈内的电流换相,根据基准信号的周期、占空比和相位闭环控制陀螺转子的转速。
5.如权利要求3所述的机电式转子陀螺的位置检测系统,其特征在于,当陀螺转子和陀螺定子的偏转角度为0°时,第一反射式光耦发射和反射光线的区域应落在位置反射环上半部分的中心点,且当陀螺转子和陀螺定子间的角度发生偏转后,第一反射式光耦发射和反射光线的区域应始终落在位置反射环的上半部分内。
6.如权利要求1所述的机电式转子陀螺的位置检测系统,其特征在于,所述位置反射环的下半部分均匀分为多个矩形区域,每个矩形区域由一个亮面直角三角形和一个暗面直角三角形组成。
7.如权利要求6所述的机电式转子陀螺的位置检测系统,其特征在于,陀螺定子上间隔90°安装有两个第二反射式光耦,用于在陀螺转子旋转和进动时检测位置反射环下半部分亮面和暗面的变化。
8.如权利要求7所述的机电式转子陀螺的位置检测系统,其特征在于,所述信号处理装置包括滞回比较器、反相器、fpga芯片和处理器,两个第二反射式光耦的输出信号经过滞回比较器和反相器的整形滤波处理后转换为两个误差信号,两个误差信号再经fpga芯片进行处理后,得到每误差信号的占空比,处理器基于两个误差信号的占空比测量结果进行线性转换为陀螺转子当前时刻分别向两个反射式光耦偏转的角度,从而得到陀螺转子与陀螺定子之间的偏转角度。
9.如权利要求7所述的机电式转子陀螺的位置检测系统,其特征在于,当陀螺转子和陀螺定子的偏转角度为0°时,第二反射式光耦发射和反射光线的区域应落在位置反射环下半部分的中心点,且当陀螺转子和陀螺定子间的角度发生偏转后,第二反射式光耦发射和反射光线的区域应始终落在位置反射环的下半部分内。
10.一种机电式转子陀螺的位置检测方法,采用如权利要求1~9任一项所述的位置检测系统,其特征在于,包括以下内容:
技术总结
本发明公开了一种机电式转子陀螺的位置检测系统及方法,其在陀螺转子的外表面上设计由亮面和暗面组成的位置反射环,并在陀螺定子上安装多个反射式光耦,以在陀螺转子旋转和进动过程中检测位置反射环上亮面和暗面的变化,最后通过信号处理装置对反射式光耦的输出信号进行信号处理,根据位置反射环上亮面和暗面的变化得到陀螺转子的旋转位置和陀螺转子与陀螺定子之间的偏转角度,利用了陀螺转子旋转过程中外表面的明暗变化来分别反映陀螺转子的旋转位置和偏转角度,即使陀螺转子和陀螺定子间的偏转角度变化时,仍然能准确测量陀螺转子的旋转位置,并且具有安装简单、占用体积小、不受电磁干扰影响、测量精度高的优点。
技术研发人员:张俊伟,曾迪欣,钟国强,汤爱平,王扩军,彭景,杨兴,杨敬宇,成亮,李鼎文,孟望
受保护的技术使用者:中国航发南方工业有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!