激光雷达和可移动设备的制作方法
本申请涉及电子设备,特别涉及一种激光雷达和应用该激光雷达的可移动设备。
背景技术:
1、在智慧交通/无人驾驶等领域中,快速精确感知道路/无人驾驶车辆的周围环境是关键点,根据传感器设备感知所获得的道路、车辆位置和障碍物信息,协调道路信号控制,从而可以提高道路管理质量和效率。
2、当前相关技术中的激光雷达多为tof(time-of-flight)激光雷达,其通过发射脉冲信号,根据脉冲信号收发的时间间隔即可以进行距离的测量。但tof激光雷达仅适用于直接测量距离,如果需要测量速度,就需根据多帧的距离测量结果计算以得到相邻两帧之间的速度;而这种获取速度的方式耗时较长,通常超过300ms,对于自动驾驶感知来说,该时效性不足以满足要求。
技术实现思路
1、本申请实施例提供一种激光雷达和可移动设备,以改善当前tof激光雷达获取速度的时效性不足的现状。
2、第一方面,本申请实施例提供了一种激光雷达,该激光雷达包括:
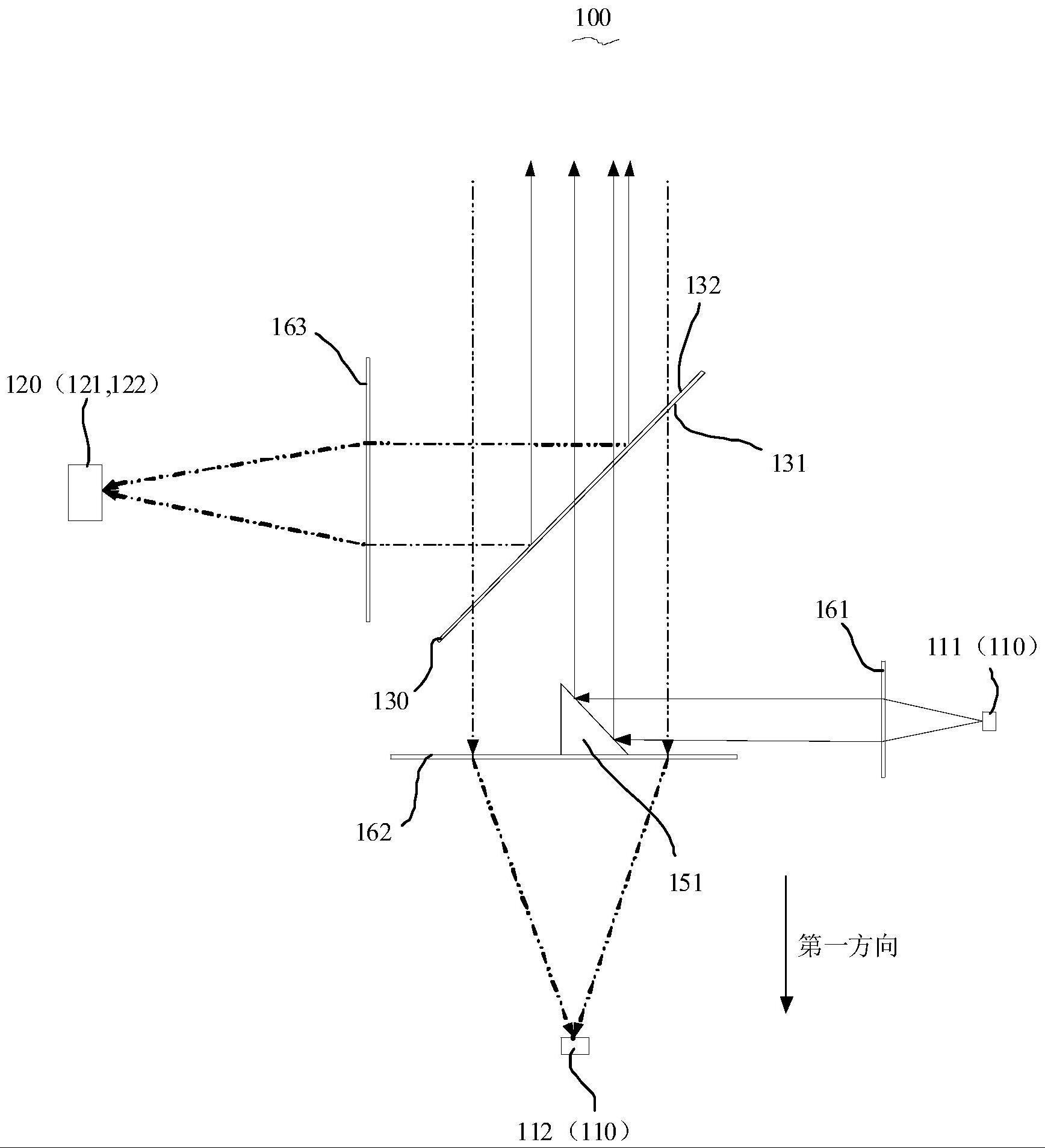
3、第一光收发模组,包括第一激光器和第一探测器,所述第一激光器用于产生第一探测光;
4、第二光收发模组,包括第二激光器和第二探测器,所述第二激光器用于产生第二探测光,所述第一探测光与所述第二探测光中的一个为脉冲波信号,另一个为连续波信号,所述第二探测光与所述第一探测光用于探测目标物体且波长不同;以及
5、分波元件,沿第一回波光与第二回波光的传输方向,所述分波元件位于所述第一探测器与所述第二探测器的上游,所述分波元件用于接收所述第一回波光与所述第二回波光,并分波以输出所述第一回波光与所述第二回波光,所述第一回波光由目标物体反射所述第一探测光形成,所述第二回波光由目标物体反射所述第二探测光形成;
6、所述第一探测器用于接收第一回波光,所述第二探测器用于接收第二回波光。
7、在一些实施例中,所述连续波为恒频连续波。
8、在一些实施例中,所述分波元件为二向色镜。
9、在一些实施例中,所述分波元件还用于接收所述第一探测光与第二探测光,以合波并输出合波后的第一探测光与第二探测光。
10、在一些实施例中,激光雷达还包括第一反射镜;
11、沿所述第一探测光的传输方向,所述第一反射镜位于所述第一激光器与所述分波元件之间,所述第一反射镜用于将所述第一探测光反射至所述分波元件。
12、在一些实施例中,激光雷达还包括第一透镜模块;
13、沿所述第一探测光的传输方向,所述第一透镜模块位于所述分波元件的上游,所述第一透镜模块包括至少一个透镜,所述第一透镜模块用于对所述第一探测光进行准直。
14、在一些实施例中,激光雷达还包括第二透镜模块;
15、沿所述第一回波光的传输方向,所述第二透镜模块位于所述分波元件与所述第一探测器之间,所述第二透镜模块包括至少一个透镜,所述第二透镜模块用于接收所述第一回波光,并对所述第一回波光进行聚焦;
16、沿第一方向,所述第二透镜模块设于所述第一反射镜背离所述分波元件的一侧,所述第一方向为所述第一反射镜反射所述第一探测光的反方向。
17、在一些实施例中,激光雷达还包括第三透镜模块;
18、沿所述第二探测光的传输方向,所述第三透镜模块位于所述分波元件的上游,所述第三透镜模块包括至少一个透镜,所述第三透镜模块用于对所述第二探测光进行准直。
19、在一些实施例中,激光雷达还包括合波元件;
20、所述合波元件用于接收所述第一探测光与所述第二探测光,并合波为同一束光,以对目标物体进行探测。
21、在一些实施例中,激光雷达还包括第二反射镜;
22、沿所述第一探测光的传输方向,所述第二反射镜位于所述合波元件的下游,所述反射镜用于反射合波后的第一探测光与第二探测光。
23、在一些实施例中,激光雷达还包括第四透镜模块;
24、沿所述第一探测光的传输方向,所述第四透镜模块位于所述合波元件的下游,所述第四透镜模块包括至少一个透镜,所述第四透镜模块用于对所述合波后的第一探测光与第二探测光进行准直。
25、在一些实施例中,激光雷达还包括第五透镜模块;
26、沿所述第一回波光的传输方向,所述五透镜模块位于所述分波元件的上游,所述第五透镜模块包括至少一个透镜,所述第五透镜模块用于接收所述第一回波光与所述第二回波光,并对所述第一回波光与所述第二回波光进行聚焦。
27、在一些实施例中,沿第一方向,所述第五透镜模块设于所述第二反射镜与所述分波元件之间,所述第一方向为所述第二反射镜反射所述第一探测光与所述第二探测光的反方向;
28、沿所述第一方向观察,所述第五透镜模块的截面轮廓覆盖所述第二反射镜。
29、在一些实施例中,激光雷达还包括分光镜;
30、沿所述第一探测光的传输方向,所述分光镜位于所述合波元件的下游,沿所述第一回波光的传输方向,所述分光镜位于所述分波元件的上游;
31、所述分光镜包括反射区与透射区,所述反射区用于反射合波后的第一探测光与第二探测光,所述透射区用于透射所述第一回波光与所述第二回波光;
32、所述透射区环绕所述反射区设置。
33、第二方面本申请提供的可移动设备,包括可移动的主体以及如上所述的激光雷达。
34、本申请实施例通过在激光雷达中设置两个光收发模组,其中第一光收发模组产生第一探测光,第二光收发模组产生第二探测光,第一探测光与第二探测光以一束光的方式出射至激光雷达之外,两者中的一个为脉冲波信号,另一个为连续波信号;且两者的波长不同,以分波元件接收第一回波光与第二回波光,并分波为向第一探测器传播的第一回波光与向第二探测器传播的第二回波光。如此,本申请激光雷达可以通过脉冲波信号进行距离探测,而通过连续波信号实现速度探测;与tof激光雷达相比,该激光雷达满足在单帧数据兼具探测距离以及速度的能力,从而具有较高的时效性。此外,与传统fmcw激光雷达中采用调频连续波进行探测的拍频信号频率较高、需要采用高速模数转换器进行采样的方案相比,该激光雷达能够通过采样率更低的模数转换器实现采样,以降低整体的器件成本。
技术特征:
1.一种激光雷达,其特征在于,包括:
2.如权利要求1所述的激光雷达,其特征在于,所述连续波为恒频连续波。
3.如权利要求1所述的激光雷达,其特征在于,所述分波元件为二向色镜。
4.如权利要求1所述的激光雷达,其特征在于,所述分波元件还用于接收所述第一探测光与所述第二探测光,以合波并输出合波后的第一探测光与第二探测光。
5.如权利要求4所述的激光雷达,其特征在于,还包括第一反射镜;
6.如权利要求5所述的激光雷达,其特征在于,还包括第一透镜模块;
7.如权利要求5所述的激光雷达,其特征在于,还包括第二透镜模块;
8.如权利要求4所述的激光雷达,其特征在于,还包括第三透镜模块;
9.如权利要求1所述的激光雷达,其特征在于,还包括合波元件;
10.如权利要求9所述的激光雷达,其特征在于,还包括第二反射镜;
11.如权利要求10所述的激光雷达,其特征在于,还包括第四透镜模块;
12.如权利要求10所述的激光雷达,其特征在于,还包括第五透镜模块;
13.如权利要求12所述的激光雷达,其特征在于,沿第一方向,所述第五透镜模块设于所述第二反射镜与所述分波元件之间,所述第一方向为所述第二反射镜反射所述第一探测光与所述第二探测光的反方向;
14.如权利要求9所述的激光雷达,其特征在于,还包括分光镜;
15.一种可移动设备,其特征在于,包括:
技术总结
本申请公开一种激光雷达和可移动设备,激光雷达包括第一光收发模组,第二光收发模组以及分波元件,第一光收发模组包括第一激光器和第一探测器,第一激光器用于产生第一探测光;第二光收发模组包括第二激光器和第二探测器,第二激光器用于产生第二探测光,第一探测光与第二探测光中的一个为脉冲波信号,另一个为连续波信号,第二探测光与第一探测光用于探测目标物体且波长不同;分波元件沿第一回波光与第二回波光的传输方向,分波元件位于第一探测器与第二探测器的上游,分波元件用于接收第一回波光与第二回波光,并分波以输出第一回波光与第二回波光。本申请技术方案改善了当前ToF激光雷达获取速度的时效性不足的现状。
技术研发人员:蒋鹏
受保护的技术使用者:深圳市速腾聚创科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!