GNSS的LcUPD和TcUPD的估计方法及装置
本发明涉及全球卫星导航系统(global navigation satellite system,gnss)数据处理,精密定位领域,特别涉及一种gnss的松组合未校准相位硬件延迟偏差(loosely-coupled uncalibrated-phase-delay,lcupd)和紧组合未校准相位硬件延迟偏差(tight-coupled uncalibrated-phase-delay,tcupd)的估计方法及装置。
背景技术:
1、全球卫星导航系统gnss(global navigation satellite system)可向全球用户提供高质量的定位、导航和授时服务,已成为重要的空间信息基础设施。精密单点定位ppp(precise point positioning)作为一种精密定位方法,在gnss精密定位与定轨、精密授时、大气科学、地球动力学等诸多领域具有独特的应用价值。然而由于相位观测值中非差模糊度与未校准相位硬件延迟偏差upd(uncalibrated-phase-delay)具有强相关性,因此导致得到的ppp定位结果均为浮点解。为了恢复非差模糊度的整数特性从而得提升ppp定位精度,缩短ppp的收敛时间,需要提前对upd进行估计。
2、虽然目前一些机构可以提供upd产品,但是提供的upd产品存在以下两个问题,一是随着当前gnss星座和波段的增加,目前的upd产品并没有完全覆盖所有星座的所有波段,且提供的upd产品均是以超宽巷组合、宽巷组合和窄巷组合的形式播发给用户的,用户端使用起来并不方便。二是当用户端在进行多星座ppp模糊度固定时,当前的upd产品只能允许用户端选择在每一个独立的星座内分别选择参考星构成星间单差模糊度,然而考虑到一些用户在多个星座中仅选择一颗参考星的需求,有必要在服务端估计一套更加方便用户端使用的面向gnss全星座全波段的高精度upd产品。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或至少部分地解决上述问题的一种gnss的lcupd和tcupd的估计方法、装置及计算机存储介质。
2、根据本发明的一个方面,提供一种gnss的lcupd和tcupd的估计方法,包括以下步骤:
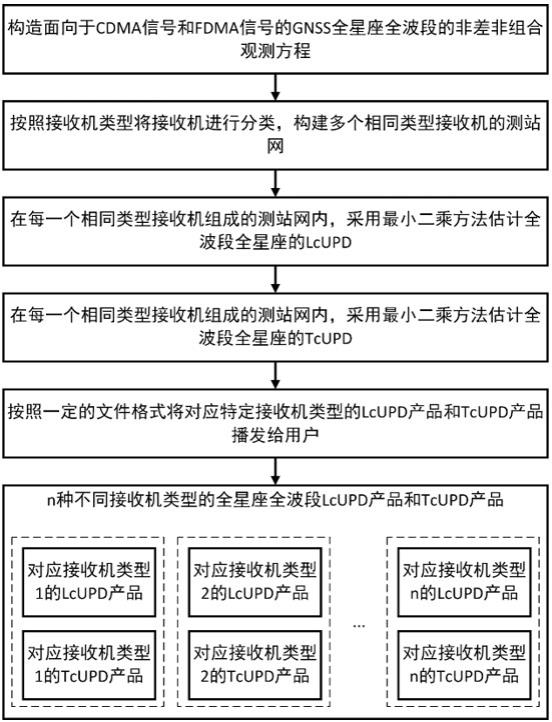
3、s1:分别建立面向使用码分多址(code division multiple access,cdma)信号和频分多址(frequency division multiple access,fdma)信号的全星座全波段的非差非组合观测方程。
4、s2:实现gnss全星座全波段的lcupd估计。
5、s3:实现gnss全星座全波段的tcupd估计。
6、s4:由于在每一个特定接收机类型的测站网中均可以得到全星座全波段的lcupd产品和tcupd产品,因此在服务端可以估计得到多个面向于不同接收机类型的全星座全波段的lcupd产品和tcupd产品,然后将其播发给用户。
7、根据本发明的另一个方面,提供了一种gnss的lcupd和tcupd的估计装置,包括:
8、构建模块,被配置为分别建立面向使用码分多址(code division multipleaccess,cdma)信号和频分多址(frequency division multiple access,fdma)信号的全星座全波段的非差非组合观测方程。
9、lcupd估计模块,被配置为用于实现gnss全星座全波段的lcupd估计。
10、tcupd估计模块,被配置为用于实现gnss全星座全波段的tcupd估计。
11、发送模块,由于在每一个特定接收机类型的测站网中均可以得到全星座全波段的lcupd产品和tcupd产品,因此在服务端可以估计得到多个面向于不同接收机类型的全星座全波段的lcupd产品和tcupd产品,然后将其播发给用户。
12、根据本发明的另一方面,提供一种电子设备,包括处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信。
13、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行本发明所述的估计方法对应的操作。
14、根据本发明的另一方面,提供一种计算机存储介质,所述存储介质中存储至少一可执行指令,所述可执行指令使处理器执行本发明所述的估计方法对应的操作。
15、本发明提供一种gnss的lcupd和tcupd的估计方法相对于现有技术具有以下有益效果:
16、本发明采集对应于gnss全星座全波段的观测数据,构建非差非组合形式的伪距和相位观测方程,采用最小二乘方法,估计每一个特定接收机类型下的gnss全星座全波段的lcupd产品和tcupd产品,设计lcupd和tcupd产品文件格式,并播发给用户使用;相较于现有upd产品计算方法,本发明不仅估计gnss全星座全波段的高精度upd产品;同时,避免只能允许用户端在每个独立的星座内分别选取参考星构造星间单差模糊度而带来的限制,较传统的upd产品计算方法具有显著的优势与特点。
17、以上所述,仅为本发明技术方案的概述,为另能够更加清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特定和优点能够更加明显易懂,以下是本发明的具体实施方式。
技术特征:
1.一种gnss的lcupd和tcupd的估计方法,其特征在于,包括如下步骤:
2.如权利要求1所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s1中,建立面向使用码分多址cdma信号的非差非组合观测方程,具体包括:
3.如权利要求1或2所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s1中,建立面向频分多址fdma信号的全星座全波段的非差非组合观测方程如下所示:
4.如权利要求1或2所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s2具体包括:
5.如权利要求4所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s22具体包括,对于任意一组超宽巷模糊度浮点解和宽巷模糊度浮点解,其表示为:
6.如权利要求4所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s23具体包括,在每一个独立的gnss星座中采用最小二乘方法计算n颗卫星的超宽巷lcupd和宽巷lcupd,表达式如下:
7.如权利要求4所述的一种gnss的lcupd和tcupd的估计方法,其特征在于,所述s24:针对每一个测站可观测到的每一颗卫星,利用s23得到的多组超宽巷lcupd和一组宽巷lcupd改正宽巷模糊度浮点解,并进一步采用直接取整方式得到宽巷模糊度固定解,然后联合两个波段的原始频点模糊度浮点解得到窄巷模糊度浮点解,表达式如下:
8.如权利要求7所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s3具体包括:
9.如权利要求8所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s33中,针对于该接收机类型的和间的超宽巷tcupd和宽巷tcupd为:
10.如权利要求8所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:所述s34中,窄巷模糊度浮点解,表达式如下:
11.如权利要求1所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:lcupd产品的文件中包含两部分,第一部分是接收机类型,第二部分是对应于全星座全波段的lcupd的估值;tcupd产品的文件中包含两部分,第一部分是接收机类型,第二部分是对应于全星座全波段的tcupd的估值。
12.如权利要求11所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:lcupd产品的文件格式具体包括,lcupd每隔30秒估计一个,第二部分共包括六个字段:星座、prn号、波段、开始时间、结束时间、lcupd。
13.如权利要求11所述的一种gnss的lcupd和tcupd的估计方法,其特征在于:tcupd产品的文件格式具体包括,tcupd每隔1天估计一个,第一部分和第二部分共包括七个字段:第一星座、第二星座、第一波段、第二波段、开始时间、结束时间、tcupd。
14.一种gnss的lcupd和tcupd的估计装置,其特征在于,具体包括:
15.一种电子设备,其特征在于,所述设备包括:处理器、存储器及存储在所述存储器上并能够在所述处理器上运行的计算机程序指令,该计算机程序被处理器执行如权利要求1-13任意一项所述的一种gnss的lcupd和tcupd的估计方法。
16.一种计算机存储介质,其特征在于,所述计算机存储介质中存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-13任意一项所述的一种gnss的lcupd和tcupd的估计方法。
技术总结
本发明提供一种GNSS的LcUPD和TcUPD的估计方法及装置。该方法具体包括:首先构建一种面向CDMA信号和FDMA信号的GNSS全星座全波段的非差非组合观测模型,然后在进行LcUPD和TcUPD估计之前提前根据接收机类型构建相同类型接收机组成的测站网,一方面使估计的LcUPD和TcUPD可以面向GNSS全星座,另一方面也为了提高估计的LcUPD和TcUPD的精度。最后采用最小二乘方法对GNSS星座中每颗可视卫星的每个波段对应的LcUPD进行估计,在获得LcUPD估值后,进一步采用最小二乘方法对任意两个GNSS星座中每个波段对应的TcUPD进行估计。
技术研发人员:王宁波,吕震,李子申,王志宇,汪亮
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!