一种多传感器对齐的外参标定方法、装置、系统及介质与流程
本发明涉及传感器标定领域,尤其涉及一种多传感器对齐的外参标定方法、装置、系统及介质。
背景技术:
1、当前,大多数slam(simultaneous localization and mapping,同时定位与地图构建)方法是基于多传感器的方法,例如基于lidar(light detection and ranging,激光雷达)+imu(inertial measurement unit,惯性测量单元)的方法、基于视觉+imu的方法以及lidar+视觉+imu的方法等。多传感器融合的方式能极大提高建图及定位的精度,但是首先需要对传感器之间的外参进行标定,即确定从一个传感器到另一个传感器的旋转关系与平移关系。现有技术中,在对表征传感器之间的旋转关系的旋转矩阵与表征平移关系的平移矩阵进行标定时,一般通过三角测量、标定板标定等方法。但这些方法需要特定的实验环境和设备,进行复杂的标定过程,需要耗费大量的时间和精力,造成传感器外参标定的效率较低,因此,如何提高传感器外参标定的效率成为亟需解决的问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种多传感器对齐的外参标定方法、装置、系统及存储介质,以解决传感器外参标定时,标定效率较低的问题。
2、第一方面,本发明实施例提供一种多传感器对齐的外参标定方法,所述外参标定方法包括:
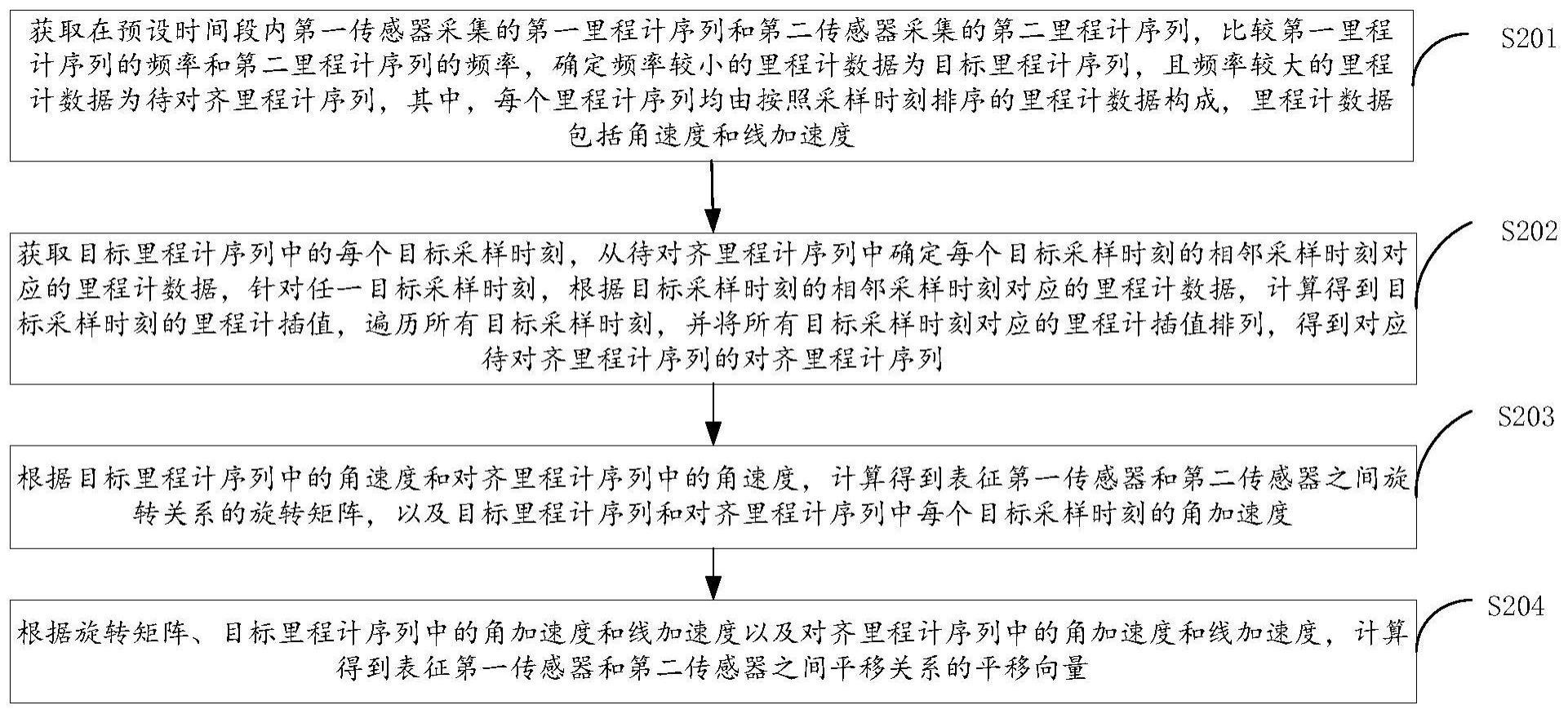
3、获取在预设时间段内第一传感器采集的第一里程计序列和第二传感器采集的第二里程计序列,比较所述第一里程计序列的频率和所述第二里程计序列的频率,确定所述频率较小的里程计数据为目标里程计序列,且频率较大的里程计数据为待对齐里程计序列,其中,每个里程计序列均由按照采样时刻排序的里程计数据构成,所述里程计数据包括角速度和线加速度;
4、获取所述目标里程计序列中的每个目标采样时刻,从所述待对齐里程计序列中确定每个目标采样时刻的相邻采样时刻对应的里程计数据,针对任一目标采样时刻,根据所述目标采样时刻的相邻采样时刻对应的里程计数据,计算得到所述目标采样时刻的里程计插值,遍历所有目标采样时刻,并将所有目标采样时刻对应的里程计插值排列,得到对应所述待对齐里程计序列的对齐里程计序列;
5、根据所述目标里程计序列中的角速度和所述对齐里程计序列中的角速度,计算得到表征所述第一传感器和所述第二传感器之间旋转关系的旋转矩阵,以及所述目标里程计序列和所述对齐里程计序列中每个目标采样时刻的角加速度;
6、根据所述旋转矩阵、所述目标里程计序列中的角加速度和线加速度以及所述对齐里程计序列中的角加速度和线加速度,计算得到表征所述第一传感器和所述第二传感器之间平移关系的平移向量。
7、第二方面,本发明实施例提供一种多传感器对齐的外参标定装置,所述外参标定装置包括:
8、获取模块,用于获取在预设时间段内第一传感器采集的第一里程计序列和第二传感器采集的第二里程计序列,比较所述第一里程计序列的频率和所述第二里程计序列的频率,确定所述频率较小的里程计数据为目标里程计序列,且频率较大的里程计数据为待对齐里程计序列,其中,每个里程计序列均由按照采样时刻排序的里程计数据构成,所述里程计数据包括角速度和线加速度;
9、插值模块,用于获取所述目标里程计序列中的每个目标采样时刻,从所述待对齐里程计序列中确定每个目标采样时刻的相邻采样时刻对应的里程计数据,针对任一目标采样时刻,根据所述目标采样时刻的相邻采样时刻对应的里程计数据,计算得到所述目标采样时刻的里程计插值,遍历所有目标采样时刻,并将所有目标采样时刻对应的里程计插值排列,得到对应所述待对齐里程计序列的对齐里程计序列;
10、第一计算模块,用于根据所述目标里程计序列中的角速度和所述对齐里程计序列中的角速度,计算得到表征所述第一传感器和所述第二传感器之间旋转关系的旋转矩阵,以及所述目标里程计序列和所述对齐里程计序列中每个目标采样时刻的角加速度;
11、第二计算模块,用于根据所述旋转矩阵、所述目标里程计序列中的角加速度和线加速度以及所述对齐里程计序列中的角加速度和线加速度,计算得到表征所述第一传感器和所述第二传感器之间平移关系的平移向量。
12、第三方面,本发明实施例提供一种多传感器对齐的外参标定系统,包括计算机设备、所述第一传感器和所述第二传感器,所述计算机设备与所述第一传感器和所述第二传感器相连,接收所述第一传感器与所述第二传感器发送的所述里程计序列,所述计算机设备与所述第一传感器和所述第二传感器相连,接收第一传感器与第二传感器发送的所述里程计序列,所述计算机设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的多传感器对齐的外参标定方法。
13、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述多传感器对齐的外参标定方法。
14、本发明与现有技术相比存在的有益效果是:
15、获取在预设时间段内第一传感器采集的第一里程计序列和第二传感器采集的第二里程计序列,比较第一里程计序列的频率和第二里程计序列的频率,确定频率较小的里程计数据为目标里程计序列,且频率较大的里程计数据为待对齐里程计序列,其中,每个里程计序列均由按照采样时刻排序的里程计数据构成,里程计数据包括角速度和线加速度,获取目标里程计序列中的每个目标采样时刻,从待对齐里程计序列中确定每个目标采样时刻的相邻采样时刻对应的里程计数据,针对任一目标采样时刻,根据目标采样时刻的相邻采样时刻对应的里程计数据,计算得到目标采样时刻的里程计插值,遍历所有目标采样时刻,并将所有目标采样时刻对应的里程计插值排列,得到对应待对齐里程计序列的对齐里程计序列,根据目标里程计序列中的角速度和对齐里程计序列中的角速度,计算得到表征第一传感器和第二传感器之间旋转关系的旋转矩阵,以及目标里程计序列和对齐里程计序列中每个目标采样时刻的角加速度,根据旋转矩阵、目标里程计序列中的角加速度和线加速度以及对齐里程计序列中的角加速度和线加速度,计算得到表征第一传感器和第二传感器之间平移关系的平移向量。本申请中,通过将不同传感器对应的不同频率里程计数据转换到同一频率中,在同一频率中,确定每个传感器对应的里程计参数,根据每个传感器对应的里程计参数计算对应传感器之间的旋转矩阵与平移向量,将旋转矩阵与平移向量作为外参标定中的旋转矩阵与平移向量,提高了传感器外参标定的效率。
技术特征:
1.一种多传感器对齐的外参标定方法,其特征在于,所述外参标定方法包括:
2.如权利要求1所述的外参标定方法,其特征在于,所述根据所述目标采样时刻的相邻采样时刻对应的里程计数据,计算得到所述目标采样时刻的里程计插值,包括:
3.如权利要求2所述的外参标定方法,其特征在于,所述根据所述目标采样时刻、所述目标采样时刻的相邻采样时刻、所述差值与所述第一里程计数据,计算所述目标采样时刻的里程计插值,包括:
4.权利要求1所述的外参标定方法,其特征在于,所述根据所述目标里程计序列中的角速度和所述对齐里程计序列中的角速度,计算得到表征所述第一传感器和所述第二传感器之间旋转关系的旋转矩阵,包括:
5.权利要求3所述的外参标定方法,其特征在于,所述计算得到所述目标里程计序列和所述对齐里程计序列中每个目标采样时刻的角加速度,包括:
6.如权利要求3所述的外参标定方法,其特征在于,所述根据所述旋转矩阵、所述目标里程计序列中的角加速度和线加速度以及所述对齐里程计序列中的角加速度和线加速度,计算得到表征所述第一传感器和所述第二传感器之间平移关系的平移向量,包括:
7.一种多传感器对齐的外参标定装置,其特征在于,所述外参标定装置包括:
8.如权利要求7所述的外参标定装置,其特征在于,所述插值模块包括:
9.一种多传感器对齐的外参标定系统,其特征在于,包括计算机设备、所述第一传感器和所述第二传感器,所述计算机设备与所述第一传感器和所述第二传感器相连,接收所述第一传感器与所述第二传感器发送的所述里程计序列,所述计算机设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述的外参标定方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的外参标定方法。
技术总结
本发明涉及传感器标定领域,尤其涉及一种多传感器对齐的外参标定方法、装置、设备及介质。根据不同传感器采集到的里程计序列,确定目标里程计序列与待对齐里程计序列,用过差值将待对齐里程计序列与目标里程计序列进行对齐,得到对齐里程计序列,根据目标里程计序列与对齐里程计序列进行外参标定,本申请中,通过将不同传感器对应的不同频率里程计数据转换到同一频率中,在同一频率中,确定每个传感器对应的里程计参数,根据每个传感器对应的里程计参数计算对应传感器之间的旋转矩阵与平移向量,将旋转矩阵与平移向量作为外参标定中的旋转矩阵与平移向量,提高了传感器外参标定的效率。
技术研发人员:蔺志,黄哲,王孝宇
受保护的技术使用者:深圳云天励飞技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!