利用时空虚拟变换的MIMO毫米波雷达二维超分辨测角方法
本发明属于雷达信号处理方法,具体涉及一种利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法。
背景技术:
1、目前4d毫米波雷达方法已成为自动驾驶领域研究的热点,相对于3d毫米波雷达,其能够同时给出目标的距离、速度、方位、俯仰四个维度的信息,具有高识别度、高动态范围、更远探测距离等优势。但同时也面临着,已有方法难以满足高精度、高分辨测量的难题。目前,尤其是在角度分辨力上,高分辨/超分辨测角方法已成为4d毫米波雷达成像的核心竞争力之一。
2、针对传统车载毫米波雷达对角度分辨力较低,且一般不具备俯仰维测角能力的问题,如何使得车载毫米波雷达具有二维高分辨或超分辨测角能力,已成为当前自动驾驶领域的研究热点。根据阵列信号处理理论可知,角度分辨力取决于阵列的物理孔径(瑞利限),若要提高角度分辨力,最有效的办法则是通过增加天线的个数增加物理孔径,但考虑到在实际车载雷达应用中,雷达体积、芯片算力、硬件成本等约束条件,可增加的天线个数是有限的。此外,雷达本身会随着车的一起移动,数据更新率较高,则使得常规的多快拍超分辨测角方法难以满足实际场景的需求。更为挑战性的难题是,在动态复杂的车辆交通环境下,相干源信号则是更为常见的,如何实现对相干源信号场景下的二维超分辨测角也是亟待解决的关键问题。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供了一种利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,包括:
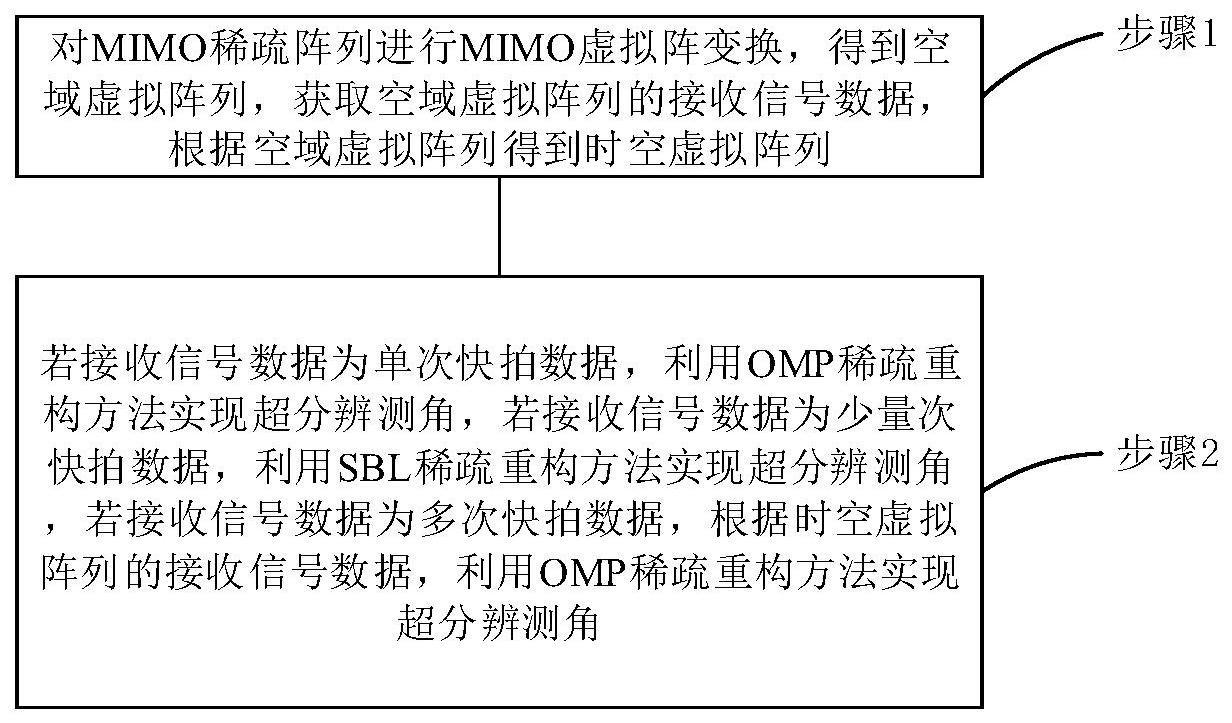
3、步骤1:对mimo稀疏阵列进行mimo虚拟阵变换,得到空域虚拟阵列,获取所述空域虚拟阵列的接收信号数据,根据所述空域虚拟阵列得到时空虚拟阵列;
4、步骤2:若所述接收信号数据为单次快拍数据,则利用omp稀疏重构方法实现超分辨测角;若所述接收信号数据为少量次快拍数据,则利用sbl的少量次快拍超分辨测角方法实现超分辨测角;若所述接收信号数据为多次快拍数据,根据所述时空虚拟阵列的接收信号数据,利用omp稀疏重构方法实现超分辨测角。
5、与现有技术相比,本发明的有益效果在于:
6、1.本发明的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,通过稀疏mimo阵列时空虚拟变换,可显著降低阵列稀疏率,有效提高阵列孔径,依据不同快拍信号样本数据独立条件,对接收信号协方差矩阵进行矢量化处理,以时间积累信息增益换取空间自由度的办法,可提高虚拟阵列的空间自由度。
7、2.本发明的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,利用压缩感知方法具有解相干的特性,解决传统空间平滑方法,难以应用于稀疏非均匀阵列场景的问题。
8、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,包括:
2.根据权利要求1所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,所述空域虚拟阵列的虚拟阵元位置表示为,
4.根据权利要求2所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,在所述步骤2中,若所述接收信号为单次快拍数据,利用omp稀疏重构方法实现超分辨测角,包括:
5.根据权利要求2所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,在所述步骤2中,若所述接收信号数据为少量次快拍数据,利用sbl稀疏重构方法实现超分辨测角,包括:
6.根据权利要求2所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,对所述空域虚拟阵列进行时域虚拟变换,得到时空虚拟阵列,包括:
7.根据权利要求6所述的利用时空虚拟变换的mimo毫米波雷达二维超分辨测角方法,其特征在于,在所述步骤2中,若所述接收信号数据为多次快拍数据,根据所述时空虚拟阵列的接收信号数据,利用omp稀疏重构方法实现超分辨测角,包括:
技术总结
本发明涉及一种利用时空虚拟变换的MIMO毫米波雷达二维超分辨测角方法,包括:利用发射信号正交特性,对MIMO稀疏阵列进行MIMO虚拟阵变换,得到空域虚拟阵列,获取空域虚拟阵列的接收信号数据,利用接收到的时域多快拍数据的独立性,再进行时域虚拟变换,获得时空虚拟阵列;在空域虚拟阵列天线布局下,若接收信号数据为单次快拍数据,则利用正交匹配追踪(OMP)稀疏重构方法实现二维超分辨测角,若接收信号数据为少量次快拍数据,则利用稀疏贝叶斯学习(SBL)稀疏重构方法实现二维超分辨测角;若接收信号数据为多次快拍数据,在时空虚拟阵列天线布局下,利用OMP方法实现超分辨测角。本发明的方法,可增大阵列有效孔径,显著提高俯仰与方位维的测角精度。
技术研发人员:曾操,刘敏提,胡树林,李世东,刘钰,廖桂生,李军
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!