一种车道线建图方法、装置、计算机设备和存储介质与流程
本公开涉及自动驾驶,具体而言,涉及一种车道线建图方法、装置、计算机设备和存储介质。
背景技术:
1、高精度地图作为服务于自动驾驶技术的专用地图,在自动驾驶技术中发挥着重要作用。车道线作为高精度地图中的重要辅助线,自动驾驶车辆可以根据车道线,实现在正确的车道线行驶,进而实现安全行车。
2、但在通常情况下,车道线构建的方式大多依赖高昂的传感器设备以及高精度激光雷达,还需要复杂且繁琐的构建步骤,构建成本较高,构建效率较低。
技术实现思路
1、本公开实施例至少提供一种车道线建图方法、装置、计算机设备和存储介质。
2、第一方面,本公开实施例提供了一种车道线建图方法,包括:
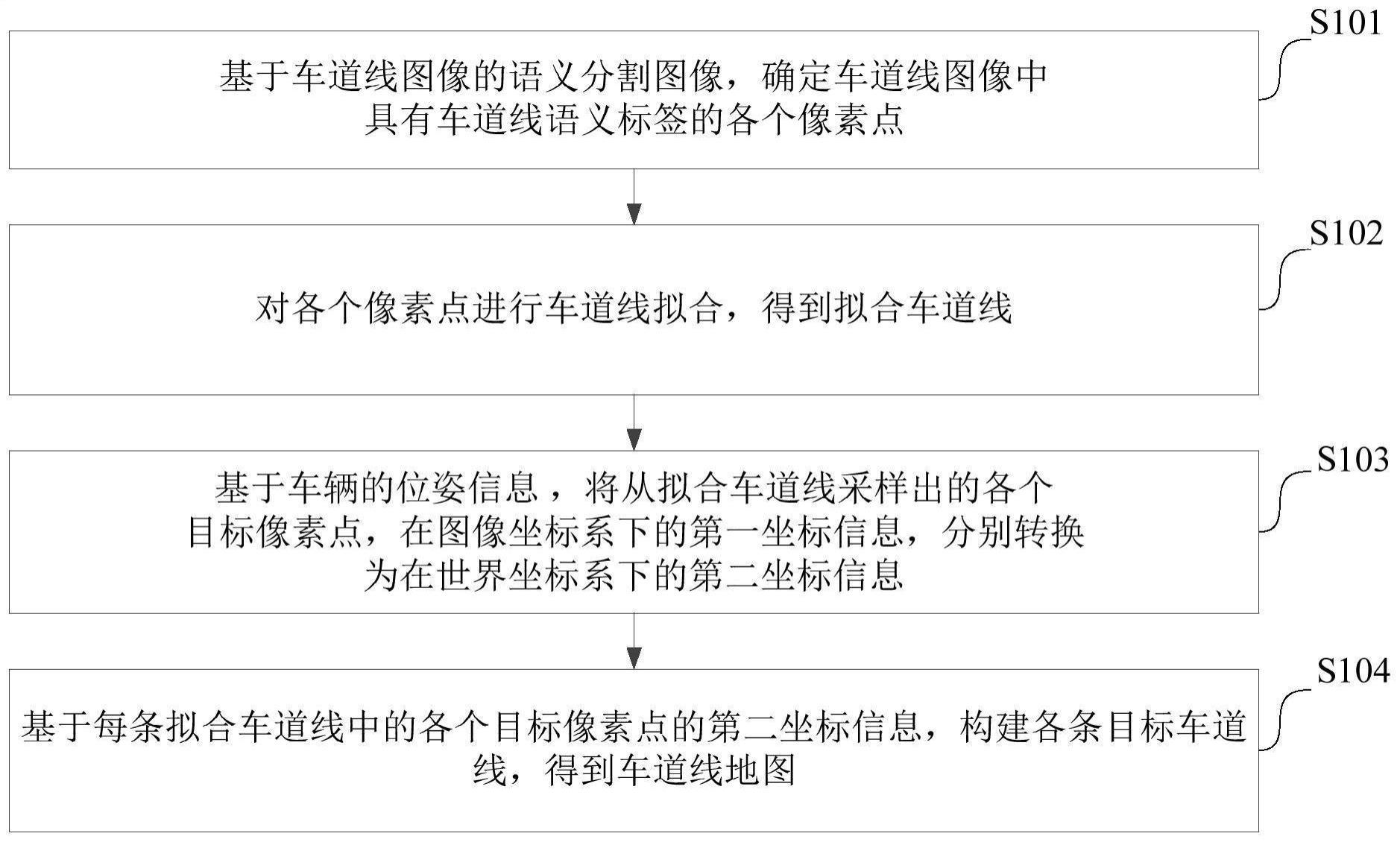
3、基于车道线图像的语义分割图像,确定所述车道线图像中具有车道线语义标签的各个像素点;
4、对所述各个像素点进行车道线拟合,得到拟合车道线;
5、基于车辆的位姿信息,将从所述拟合车道线采样出的各个目标像素点,在图像坐标系下的第一坐标信息,分别转换为在世界坐标系下的第二坐标信息;
6、基于每条所述拟合车道线中的各个目标像素点的第二坐标信息,构建各条目标车道线,得到车道线地图。
7、该实施方式,利用车道线图像的语义分割图像进行车道线的拟合,不需要使用高昂的传感器设备以及高精度激光雷达,有效降低了车道线构建的成本。由于语义分割图像可以指示具有车道线语义标签的各个像素点,因此,基于语义分割图像可以快速挑选出属于车道线的像素点,进而快速拟合出各条拟合车道线。再从拟合车道线中采样目标像素点,并将目标像素点的第一坐标信息转换为在世界坐标系下的第二坐标信息,最后基于每条拟合车道线中的各个目标像素点的第二坐标信息进行车道线的构建;能够实现在世界坐标系下,快速且准确地构建出各条目标车道线,有效提高了车道线构建的效率,最终得到准确的车道线地图。
8、第二方面,本公开实施例还提供一种车道线建图装置,包括:
9、确定模块,用于基于车道线图像的语义分割图像,确定所述车道线图像中具有车道线语义标签的各个像素点;
10、拟合模块,用于对所述各个像素点进行车道线拟合,得到拟合车道线;
11、转换模块,用于基于车辆的位姿信息,将从所述拟合车道线采样出的各个目标像素点,在图像坐标系下的第一坐标信息,分别转换为在世界坐标系下的第二坐标信息;
12、构建模块,用于基于每条所述拟合车道线中的各个目标像素点的第二坐标信息,构建各条目标车道线,得到车道线地图。
13、第三方面,本公开可选实现方式还提供一种计算机设备,处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述处理器用于执行所述存储器中存储的机器可读指令,所述机器可读指令被所述处理器执行时,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
14、第四方面,本公开可选实现方式还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
15、关于上述车道线建图装置、计算机设备、及计算机可读存储介质的效果描述参见上述车道线建图方法的说明,这里不再赘述。
16、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种车道线建图方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于每条所述拟合车道线中的各个目标像素点的第二坐标信息,构建各条目标车道线,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于每个所述目标像素点的第三坐标信息,构建与所述拟合车道线和所述重叠车道线相关联的目标车道线,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于各个所述目标像素点的所述第四坐标信息,构建与所述拟合车道线和所述重叠车道线相关联的所述目标车道线,包括:
5.根据权利要求2至4任一项所述的方法,其特征在于,按照以下步骤确定所述已构建车道线是否与所述拟合车道线重叠:
6.根据权利要求1至5任一项所述的方法,其特征在于,所述基于车辆的位姿信息,将从所述拟合车道线采样出的各个目标像素点,在图像坐标系下的第一坐标信息,分别转换为在世界坐标系下的第二坐标信息,包括:
7.根据权利要求1至6任一项所述的方法,其特征在于,所述对所述各个像素点进行车道线拟合,得到拟合车道线,包括:
8.根据权利要求7所述的方法,其特征在于,采用以下步骤确定所述扩展后的初始线段是否符合所述第二预设条件:
9.根据权利要求7或8所述的方法,其特征在于,所述基于所述第一车道线关联的各个所述目标线段,确定所述第一车道线关联的至少一条拟合车道线,包括:
10.根据权利要求7或8所述的方法,其特征在于,所述基于所述第一车道线关联的各个所述目标线段,确定所述第一车道线关联的至少一条拟合车道线,包括:
11.根据权利要求1至10任一项所述的方法,其特征在于,所述方法还包括获取所述车道线图像的步骤:
12.根据权利要求7至11任一项所述的方法,其特征在于,确定由所述各个像素点构成的各条第一车道线,包括:
13.一种车道线建图装置,其特征在于,包括:
14.一种计算机设备,其特征在于,包括:处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述处理器用于执行所述存储器中存储的机器可读指令,所述机器可读指令被所述处理器执行时,所述处理器执行如权利要求1至12任意一项所述的车道线建图方法的步骤。
15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被计算机设备运行时,所述计算机设备执行如权利要求1至12任意一项所述的车道线建图方法的步骤。
技术总结
本公开提供了一种车道线建图方法、装置、计算机设备和存储介质,其中,该方法包括:基于车道线图像的语义分割图像,确定车道线图像中具有车道线语义标签的各个像素点;对各个像素点进行车道线拟合,得到拟合车道线;基于车辆的位姿信息,将从拟合车道线采样出的各个目标像素点,在图像坐标系下的第一坐标信息,分别转换为在世界坐标系下的第二坐标信息;基于每条拟合车道线中的各个目标像素点的第二坐标信息,构建各条目标车道线,得到车道线地图。
技术研发人员:赵明,方宇,刘余钱
受保护的技术使用者:上海临港绝影智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!