基于移动闭塞的北斗初始定位算法效率优化方法及装置与流程
本文件涉及轨道交通,尤其涉及一种基于移动闭塞的北斗初始定位算法效率优化方法及装置。
背景技术:
1、目前,移动闭塞系统中,北斗初始定位需要以下前提条件:
2、电子地图数据需按照区间和站内的方式记录北斗定标点信息,北斗定标点信息包含定标点地理坐标-经度、定标点地理坐标-纬度、定标点地理坐标-高度、定标点link编号、定标点link偏移、所属ci编号。
3、其中,glink信息含有其起点、终点(标准圆会含圆弧中间点)的经纬度信息、link+offset信息,也就是g-link和link的对应关系是确定的。通过解析几何运算,可将实时经纬度信息映射到g-link上;进而可利用g-link与link的对应关系,将实时经纬度信息映射到link上。
4、电子地图数据制作前,需要明确当前所处经纬度信息处于区间或站内,并且每个站内的股道信息需要明确,为优化北斗初始定位打好基础。
5、在现有技术的移动闭塞列控系统工作过程中,由于线路站场信息数量越来越大导致电子地图数据中存储的北斗定标信息越来越多,所采用顺序查找或效率略快的二分查找使得查找的效率特别低下。
技术实现思路
1、本发明的目的在于提供一种基于移动闭塞的北斗初始定位算法效率优化方法及装置,旨在解决现有技术中的移动闭塞列控系统工作过程中,由于线路站场信息数量越来越大导致电子地图数据中存储的北斗定标信息越来越多,若秉承着顺序查找或效率略快的二分查找不能满足提高效率的问题。
2、本发明提供一种基于移动闭塞的北斗初始定位算法效率优化方法,包括:
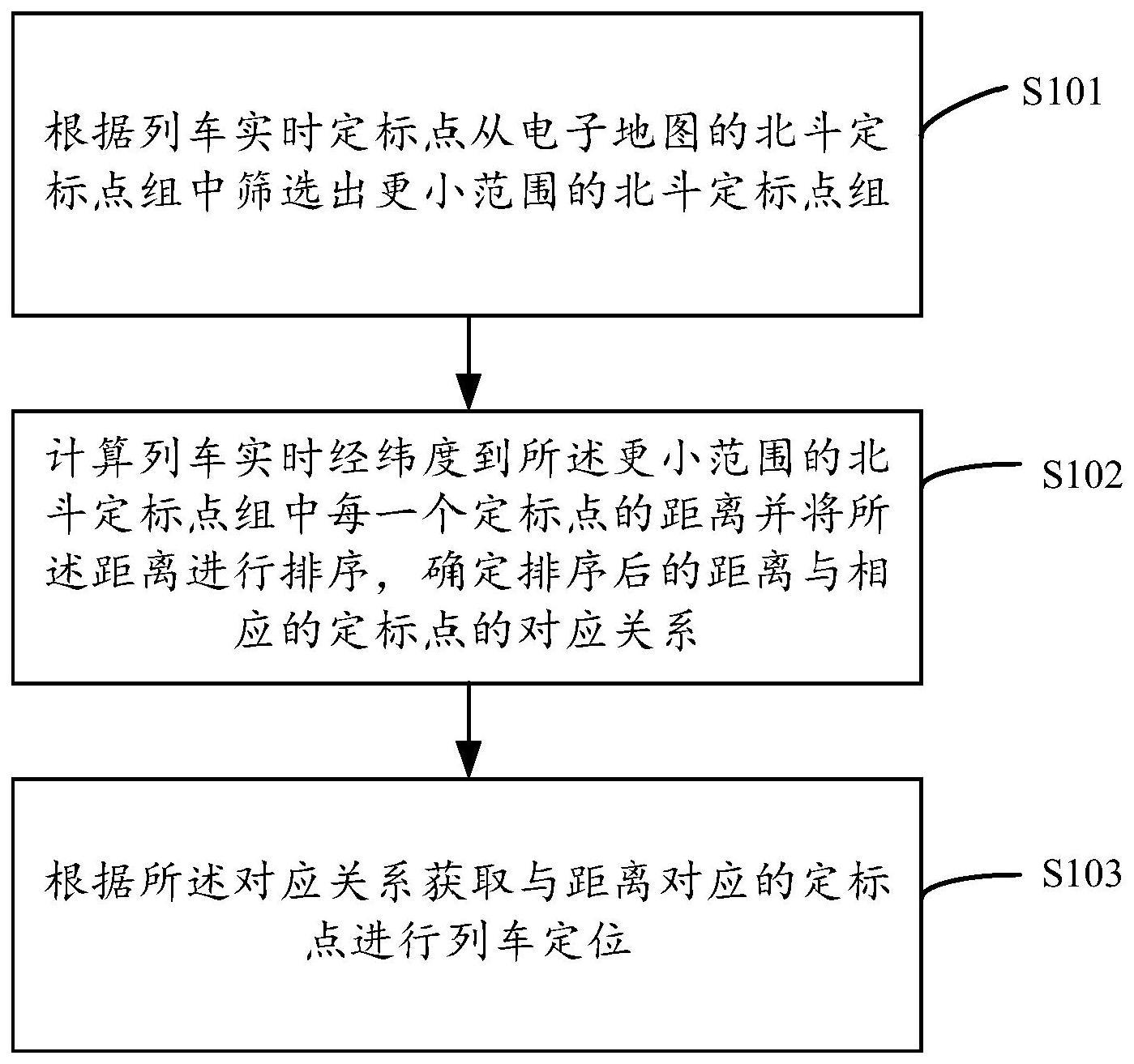
3、根据列车实时定标点从电子地图的北斗定标点组中筛选出更小范围的北斗定标点组;
4、计算列车实时经纬度到所述更小范围的北斗定标点组中每一个定标点的距离并将所述距离进行排序,确定排序后的距离与相应的定标点的对应关系;
5、根据所述对应关系获取与距离对应的定标点进行列车定位。
6、本发明提供一种基于移动闭塞的北斗初始定位算法效率优化装置,包括:
7、筛选模块,用于根据列车实时定标点从电子地图的北斗定标点组中筛选出更小范围的北斗定标点组;
8、计算模块,用于计算列车实时经纬度到所述更小范围的北斗定标点组中每一个定标点的距离并将所述距离进行排序,确定排序后的距离与相应的定标点的对应关系;
9、定位模块,用于根据所述对应关系获取与距离对应的定标点进行列车定位。
10、优选地,所述筛选模块具体用于:
11、筛选出电子地图中列车实时定标点(x1,y1)与北斗定标点组(x,y)中的定标点的距离小于阈值k的定标点;
12、判断列车是否处于筛选出的定标点的范围中,如果判断为是,则根据筛选出的定标点生成更小范围的北斗定标点组(x’,y’)。
13、优选地,所述筛选模块进一步用于:
14、根据当经度差值为0,纬度每差0.00001时,距离相差1.11米,当维度差值为0,经度每差0.00001时,距离相差0.88米,确定阈值k的取值。
15、优选地,所述计算模块具体用于:
16、根据经纬度计算距离公式,计算列车实时经纬度到更小范围的北斗定标点组(x’,y’)中的每一个定标点的距离s1、s2、s3......sn’;
17、将计算得到的距离s1、s2、s3......sn’进行排序,得到排序后的距离k1、k2、k3.......kn’,将排序后的距离k1、k2、k3.......kn’与更小范围的北斗定标点组(x’,y’)中定标点建立一一对应索引表。
18、优选地,所述定位模块具体用于:
19、根据距离最近的k1所处电子地图中的线路情况进行列车模糊定位;
20、根据线路要求获取任意数量的k1、k2...kn’,进行详细的列车初始定位。
21、本发明实施例还提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述基于移动闭塞的北斗初始定位算法效率优化方法的步骤。
22、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现上述基于移动闭塞的北斗初始定位算法效率优化方法的步骤。
23、采用本发明实施例,解决了现有技术中移动闭塞列控系统进行北斗初始定位时,由于电子地图数据中北斗定标点的数据量不断增加所导致搜索效率变慢的问题,本发明实施例的技术方案能够根据线路既有特点,提高了北斗初始定位的效率。
技术特征:
1.一种基于移动闭塞的北斗初始定位算法效率优化方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,根据列车实时定标点从电子地图的北斗定标点组中筛选出更小范围的北斗定标点组具体包括:
3.根据权利要求2所述的方法,其特征在于,所述方法进一步包括:
4.根据权利要求1所述的方法,其特征在于,计算列车实时经纬度到所述更小范围的北斗定标点组中每一个定标点的距离并将所述距离进行排序,确定排序后的距离与相应的定标点的对应关系具体包括:
5.根据权利要求4所述的方法,其特征在于,根据所述对应关系获取与距离对应的定标点进行列车定位具体包括:
6.一种基于移动闭塞的北斗初始定位算法效率优化装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述筛选模块具体用于:
8.根据权利要求7所述的装置,其特征在于,所述筛选模块进一步用于:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至4中任一项所述的基于移动闭塞的北斗初始定位算法效率优化方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现如权利要求1至4中任一项所述的基于移动闭塞的北斗初始定位算法效率优化方法的步骤。
技术总结
本说明书实施例提供了一种基于移动闭塞的北斗初始定位算法效率优化方法及装置,其中,方法包括:根据列车实时定标点从电子地图的北斗定标点组中筛选出更小范围的北斗定标点组;计算列车实时经纬度到所述更小范围的北斗定标点组中每一个定标点的距离并将所述距离进行排序,确定排序后的距离与相应的定标点的对应关系;根据所述对应关系获取与距离对应的定标点进行列车定位。本说明书实施例能够提高北斗初始定位效率。
技术研发人员:马博彬,余小冬
受保护的技术使用者:交控科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!