一种定位信息解算方法、装置、存储介质及电子设备与流程
本申请涉及卫星领域,具体而言,涉及一种定位信息解算方法、装置、存储介质及电子设备。
背景技术:
1、gnss(global navigation satellite system,gnss)为全天候、全球、高精度的无线电导航技术,可在任何时间、任何地点获取到绝对位置坐标,可应用于测量测绘、自动驾驶等领域。随着自动驾驶行业的发展,对gnss定位的实时性、定位精度、连续性和可靠性提出了更高的需求。目前gnss高精度实时厘米的定位方案主要有rtk(real-time kinematic,rtk)和ppp-rtk(precise point positioning and real-time kinematic,ppp-rtk)两种方案。rtk技术通过与基准站或者vrs点作差,以消除或者削弱卫星端轨道误差、卫星端钟差以及大气误差的影响,以获取得到实时高精度厘米级定位,而ppp-rtk技术是通过播发ssr(state space representation,ssr)数据以消除或者削弱卫星端轨道误差、卫星端钟差、卫星端phase bias和code bias以及大气误差的影响,以获得实时高精度厘米级定位。
2、rtk(real-time kinematic,rtk)和ppp-rtk(precise point positioning andreal-time kinematic,ppp-rtk)都存在耗时过大甚至无法满足嵌入式平台的需求,使其难以满足实时性需求。
技术实现思路
1、本申请的目的在于提供一种定位信息解算方法、装置、存储介质及电子设备,以至少部分改善上述问题。
2、为了实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供一种定位信息解算方法,所述方法包括:
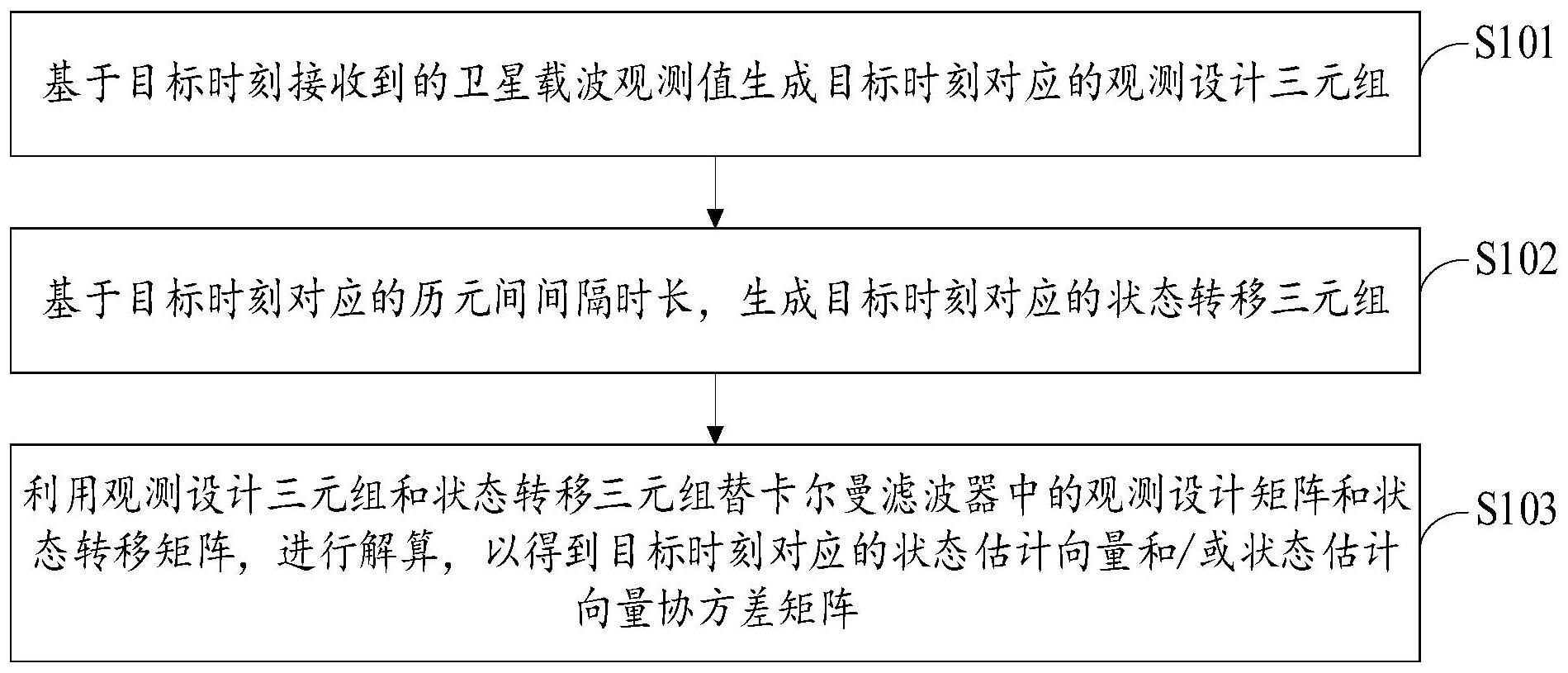
4、基于目标时刻接收到的卫星载波观测值生成目标时刻对应的观测设计三元组;
5、其中,所述观测设计三元组包括所述目标时刻对应的观测设计矩阵中的所有非零元素和每一个非零元素在所述观测设计矩阵中的位置信息;
6、基于所述目标时刻对应的历元间间隔时长,生成所述目标时刻对应的状态转移三元组;
7、其中,所述状态转移三元组所述目标时刻对应的状态转移矩阵中的所有非零元素和每一个非零元素在所述状态转移矩阵中的位置信息;
8、利用所述观测设计三元组和所述状态转移三元组替卡尔曼滤波器中的所述观测设计矩阵和所述状态转移矩阵,进行解算,以得到所述目标时刻对应的状态估计向量和/或状态估计向量协方差矩阵。
9、第二方面,本申请实施例提供一种种定位信息解算装置,所述装置包括:
10、处理单元,用于基于目标时刻接收到的卫星载波观测值生成目标时刻对应的观测设计三元组;
11、其中,所述观测设计三元组包括所述目标时刻对应的观测设计矩阵中的所有非零元素和每一个非零元素在所述观测设计矩阵中的位置信息;
12、所述处理单元还用于基于所述目标时刻对应的历元间间隔时长,生成所述目标时刻对应的状态转移三元组;
13、其中,所述状态转移三元组所述目标时刻对应的状态转移矩阵中的所有非零元素和每一个非零元素在所述状态转移矩阵中的位置信息;
14、解算单元,用于利用所述观测设计三元组和所述状态转移三元组替卡尔曼滤波器中的所述观测设计矩阵和所述状态转移矩阵,进行解算,以得到所述目标时刻对应的状态估计向量和/或状态估计向量协方差矩阵。
15、第三方面,本申请实施例提供一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的方法。
16、第四方面,本申请实施例提供一种电子设备,所述电子设备包括:处理器和存储器,所述存储器用于存储一个或多个程序;当所述一个或多个程序被所述处理器执行时,实现上述的方法。
17、相对于现有技术,本申请实施例所提供的一种定位信息解算方法、装置、存储介质及电子设备,包括:基于目标时刻接收到的卫星载波观测值生成目标时刻对应的观测设计三元组;其中,观测设计三元组包括目标时刻对应的观测设计矩阵中的所有非零元素和每一个非零元素在观测设计矩阵中的位置信息;基于目标时刻对应的历元间间隔时长,生成目标时刻对应的状态转移三元组;其中,状态转移三元组目标时刻对应的状态转移矩阵中的所有非零元素和每一个非零元素在状态转移矩阵中的位置信息;利用观测设计三元组和状态转移三元组替卡尔曼滤波器中的观测设计矩阵和状态转移矩阵,进行解算,以得到目标时刻对应的状态估计向量和/或状态估计向量协方差矩阵,可减少大量内存消耗和优化算法耗时。
18、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种定位信息解算方法,其特征在于,所述方法包括:
2.如权利要求1所述的定位信息解算方法,其特征在于,所述基于目标时刻接收到的卫星载波观测值生成目标时刻对应的观测设计三元组的步骤,包括:
3.如权利要求1所述的定位信息解算方法,其特征在于,所述利用所述观测设计三元组和所述状态转移三元组替卡尔曼滤波器中的所述观测设计矩阵和所述状态转移矩阵,进行解算,以得到所述目标时刻对应的状态估计向量和/或状态估计向量协方差矩阵的步骤,包括:
4.如权利要求3所述的定位信息解算方法,其特征在于,所述方法还包括:
5.如权利要求1所述的定位信息解算方法,其特征在于,在得到所述目标时刻对应的状态估计向量和/或状态估计向量协方差矩阵之后,所述方法还包括:
6.如权利要求5所述的定位信息解算方法,其特征在于,所述基于所述目标时刻对应的状态估计向量和状态估计向量协方差矩阵进行模糊度解算,以得到模糊度固定值的步骤,包括:
7.如权利要求6所述的定位信息解算方法,其特征在于,所述基于所述初始模糊度值和所述初始协方差获取所述目标时刻对应的星间单差模糊度值和星间单差协方差的步骤,包括:
8.一种定位信息解算装置,其特征在于,所述装置包括:
9.如权利要求8所述的定位信息解算装置,其特征在于,所述处理单元还用于基于目标时刻接收到的卫星载波观测值获取各个卫星在目标方向上相对于接收机的方向余弦;基于所述方向余弦和卫星对应的载波波长生成对应的观测设计三元组。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
11.一种电子设备,其特征在于,包括:处理器和存储器,所述存储器用于存储一个或多个程序;当所述一个或多个程序被所述处理器执行时,实现如权利要求1-7中任一项所述的方法。
技术总结
本申请提出一种定位信息解算方法、装置、存储介质及电子设备,包括:基于目标时刻接收到的卫星载波观测值生成目标时刻对应的观测设计三元组;观测设计三元组包括目标时刻对应的观测设计矩阵中的所有非零元素和每一个非零元素在观测设计矩阵中的位置信息;基于目标时刻对应的历元间间隔时长,生成目标时刻对应的状态转移三元组;其中,状态转移三元组目标时刻对应的状态转移矩阵中的所有非零元素和每一个非零元素在状态转移矩阵中的位置信息;利用观测设计三元组和状态转移三元组替卡尔曼滤波器中的观测设计矩阵和状态转移矩阵,进行解算,以得到目标时刻对应的状态估计向量和状态估计向量协方差矩阵,减少大量内存消耗和优化算法耗时。
技术研发人员:陈亮,王理砚,司徒春辉,请求不公布姓名,请求不公布姓名,侯晓伟,汪宇豪
受保护的技术使用者:广州导远电子科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!