一种搜救机器人的搜救方法、上位机和下位机
本发明涉及机器人,具体是涉及一种搜救机器人的搜救方法、上位机和下位机。
背景技术:
1、在2017年,mario silvagni和他的团队设计了一款多功能搜救无人机,用于在山区雪崩事故中进行搜救工作。该无人机具备出色的负载能力和可自定义的飞行操作,同时还具备一定的自主能力。该搜救无人机通过使用跟踪、定位、导航和路径规划算法来进行搜救任务规划。此外,无人机配备了红外成像功能的摄像头,即使在视线不佳的情况下也能执行搜救任务。
2、然而,该搜救机器人缺乏实时现场建图功能,没有实时的场景地图,该搜救机器人难以准确感知和识别当前环境中的障碍物,如树木、岩石等。这可能导致该搜救机器人在执行搜救任务时与障碍物相撞或受到干扰;该搜救机器人无法根据当前环境的实际情况进行准确的路径规划,它可能选择不适合的路径,导致效率低下或无法到达目标区域。无实时地图的情况下,搜救搜救机器人可能无法有效地确定已经搜索过的区域,因此可能会重复搜索相同的区域,浪费时间和资源,而忽略其他可能有更高搜救成功率的区域。
技术实现思路
1、(一)要解决的技术问题
2、本发明主要针对以上问题,提出了一种搜救机器人的搜救方法、上位机和下位机,其目的是解决如何提高灾后救援的效率与安全性,如何能够及时有效地完成救援任务的问题。
3、(二)技术方案
4、为实现上述目的,本发明第一方面提供了一种搜救机器人的搜救方法,所述搜救机器人的搜救方法包括:
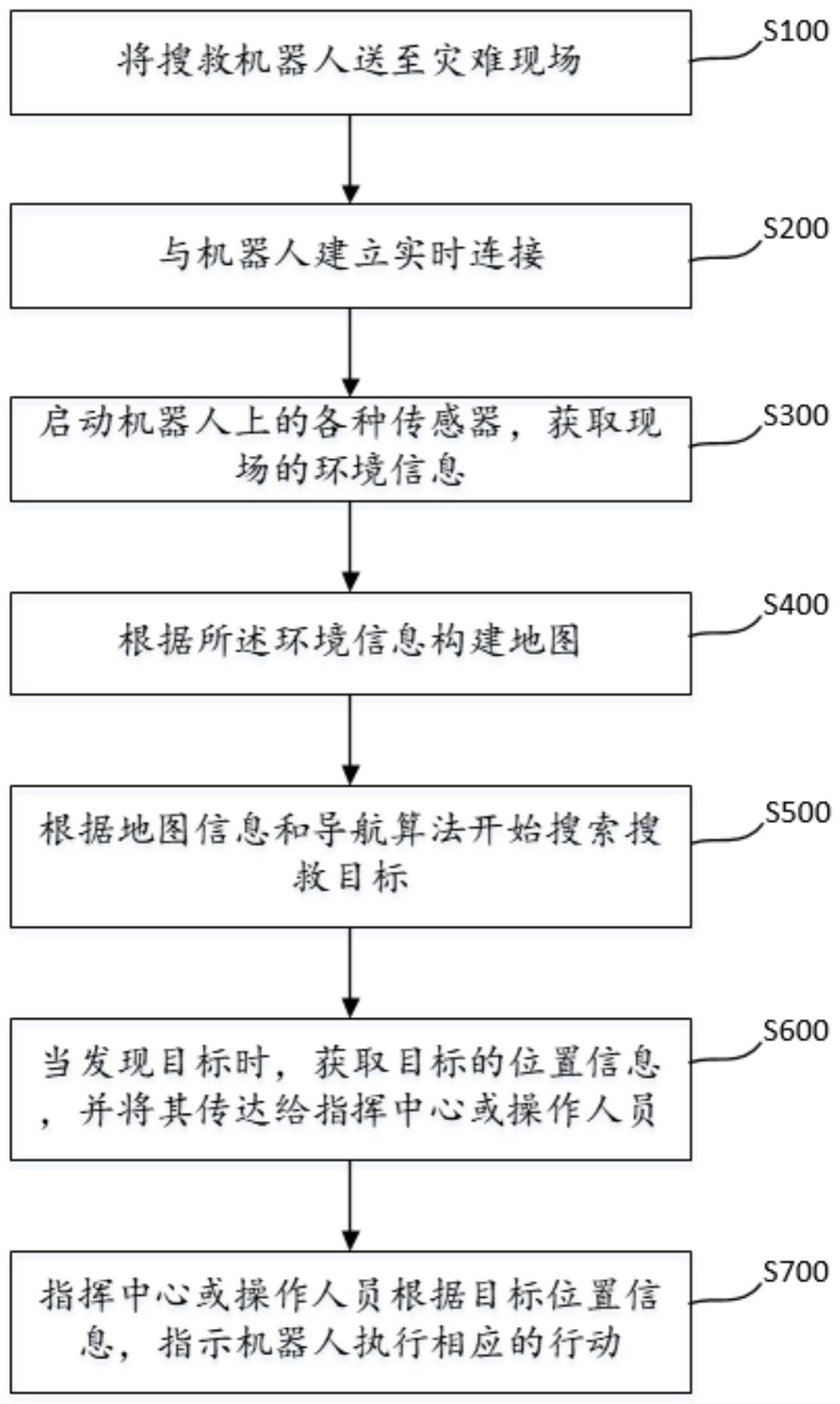
5、将搜救机器人送至灾难现场;
6、与机器人建立实时连接;
7、启动机器人上的各种传感器,获取现场的环境信息;
8、根据所述环境信息构建地图;
9、根据地图信息和导航算法开始搜索搜救目标;
10、当发现目标时,获取目标的位置信息,并将其传达给指挥中心或操作人员;
11、指挥中心或操作人员根据目标位置信息,指示机器人执行相应的救援行动。
12、进一步地,根据所述环境信息构建地图的步骤包括:
13、初始化里程计节点:在上位机中,初始化一个里程计节点,接收下位机传输的编码器脉冲数,并计算机器人的瞬时速度;
14、计算机器人位姿:根据接收到的编码器脉冲数,结合已知的参数,推算出机器人每个时间步长的位移和转角,累积所述位移和转角,计算出机器人当前的位置和姿态信息,其中,所述已知的参数至少包括车轮半径、轮距;
15、获取传感器信息:利用jy61角度传感器获取机器人的姿态信息;
16、激光雷达数据处理:使用x2l激光雷达获取现场的点云数据;
17、融合传感器信息和里程计数据:将计算得到的机器人姿态信息与传感器信息获取的姿态信息进行融合;
18、构建地图:将融合后的机器人姿态信息与激光雷达返回的点云数据进行地图构建。
19、进一步地,在所述激光雷达数据处理中,还包括将激光雷达返回的点云数据进行滤波和处理。
20、进一步地,所述方法还包括:在整个搜救过程中,接收并实时监控机器人的环境画面和传感器数据。
21、进一步地,所述方法还包括:将机器人在搜救过程中收集到的数据传给指挥中心或操作人员进行进一步的分析和评估。
22、为实现上述目的,本发明第二方面提供了一种上位机,包括:
23、接收模块,接收激光雷达节点发布的点云数据、摄像头节点发布的图像数据、下位机传输的传感器数据及操作人员输入的指令数据;
24、数据模块,对接收到的各数据进行相应的处理;
25、反馈和发布模块,将经过处理的数据反馈给相关节点或发布至ros系统中的其他节点。
26、进一步地,在所述数据模块中,对接收到的各数据进行相应的处理包括:使用ros提供的gmapping算法节点进行地图构建、进行摄像头图像数据处理、对接收到的下位机传感器数据进行解析和处理,及根据接收到的键盘输入指令进行相应的控制命令生成。
27、进一步地,在反馈和发布模块中,将经过处理的数据反馈给相关节点或发布至ros系统中的其他节点的步骤包括:
28、里程计数据反馈:将通过电机速度计算得到的里程计数据反馈给rviz模型节点;
29、图像数据反馈:将经过图像处理的摄像头图像数据反馈给相关节点或用于视觉slam算法;
30、控制指令发布:将生成的控制指令发布与下位机建立的双向通信节点进行串口通信。
31、为实现上述目的,本发明第三方面提供了一种下位机,包括:
32、串口通信模块,与上位机的双向通信节点建立串口连接;
33、接收模块,接收上位机发送的控制指令;
34、执行控制模块,根据上位机发送的控制指令,控制相关传感器获取实时数据;
35、处理模块,对接收到的传感器数据进行编码器数据处理、陀螺仪数据处理及其他传感器数据处理;
36、数据反馈模块,将执行结果或传感器数据通过串口通信发送给上位机。
37、进一步地,在数据反馈模块中,使用433m无线模块将图像信息及数据回传给上位机。
38、(三)有益效果
39、与现有技术相比,本发明提供的一种搜救机器人的搜救方法、上位机和下位机,上位机可以实现通过所得电机速度完成里程计计算,并将计算得到的机器人位姿和融合后的imu信息与激光雷达返回的点云数据相结合,构建出实时的地图,通过地图,可以进行路径规划和导航,确定最短、最安全的路径,避开不可通行区域或危险地带,能够提高搜救行动的效率和成功率,有助于保护搜救人员的安全,并最大程度地救助被困人员。
技术特征:
1.一种搜救机器人的搜救方法,其特征在于,所述搜救机器人的搜救方法包括:
2.如权利要求1所述的一种搜救机器人的搜救方法,其特征在于,根据所述环境信息构建地图的步骤包括:
3.如权利要求2所述的一种搜救机器人的搜救方法,其特征在于,在所述激光雷达数据处理中,还包括将激光雷达返回的点云数据进行滤波和处理。
4.如权利要求1所述的一种搜救机器人的搜救方法,其特征在于,所述方法还包括:在整个搜救过程中,接收并实时监控机器人的环境画面和传感器数据。
5.如权利要求1所述的一种搜救机器人的搜救方法,其特征在于,所述方法还包括:将机器人在搜救过程中收集到的数据传给指挥中心或操作人员进行进一步的分析和评估。
6.一种上位机,其特征在于,包括:
7.如权利要求6所述的一种上位机,其特征在于,在所述数据模块中,对接收到的各数据进行相应的处理包括:使用ros提供的gmapping算法节点进行地图构建、进行摄像头图像数据处理、对接收到的下位机传感器数据进行解析和处理,及根据接收到的键盘输入指令进行相应的控制命令生成。
8.如权利要求6所述的一种上位机,其特征在于,在反馈和发布模块中,将经过处理的数据反馈给相关节点或发布至ros系统中的其他节点的步骤包括:
9.一种下位机,其特征在于,包括:
10.如权利要求9所述的一种下位机,其特征在于,在数据反馈模块中,使用433m无线模块将图像信息及数据回传给上位机。
技术总结
本发明涉及机器人技术领域,具体是涉及一种搜救机器人的搜救方法、上位机和下位机。所述搜救机器人的搜救方法包括:将搜救机器人送至灾难现场;与机器人建立实时连接;启动机器人上的各种传感器,获取现场的环境信息;根据所述环境信息构建地图;根据地图信息和导航算法开始搜索搜救目标;当发现目标时,获取目标的位置信息,并将其传达给指挥中心或操作人员;指挥中心或操作人员根据目标位置信息,指示机器人执行相应的救援行动。本搜救机器人用于灾难现场搜救任务,能够通过PC端433无线通信实时控制机器人、接收搜救机器人现场画面并完成自动建图,从而安全高效地完成灾后救援任务。
技术研发人员:刘兴超,杨大伟,李冬冬,解峥
受保护的技术使用者:哈尔滨工业大学重庆研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!