一种拼接式空心角锥阵列共相调整方法及像质评价方法与流程
本发明涉及光学检测,具体涉及一种拼接式空心角锥阵列共相调整方法及像质评价方法。
背景技术:
1、光学合作目标泛指配合光学仪器进行激光测距、跟踪、校零等任务的合作目标。光学合作目标为光学仪器提供反馈信号,以增大激光脉冲回波能量,增加测程,提高测距进度。理想的光学合作目标具有空间定向反射特性,即以任意方向入射的光经过光学合作目标反射后,仍以与入射光平行的方向返回,因此对光学合作目标的回光平行度要求不大于30角秒,需要实现光学共相位。常规的光学合作目标为单块小口径的定向反射器。随着测距、跟踪距离的增加,合作目标的口径需要相应的增加,但单块大口径的定向反射器的材料、加工、检测、运输、制造成本方面存在较大的困难。因此拼接式空心角锥阵列应运而生,拼接式空心角锥阵列通过多块小口径的空心角锥以一定的阵列形式拼接形成大口径的拼接式空心角锥阵列。但目前缺少有效的调整方法来实现拼接式空心角锥阵列各子镜之间的共相位调整。
技术实现思路
1、本发明目的在于提供一种拼接式空心角锥阵列共相调整方法,能够有效的解决拼接式空心角锥阵列共相调整的技术难题,同时提出一种拼接式空心角锥阵列共相调整后的像质进行评价的方法,从而实现对拼接式空心角锥阵列的像质评价。
2、本发明通过下述技术方案实现:
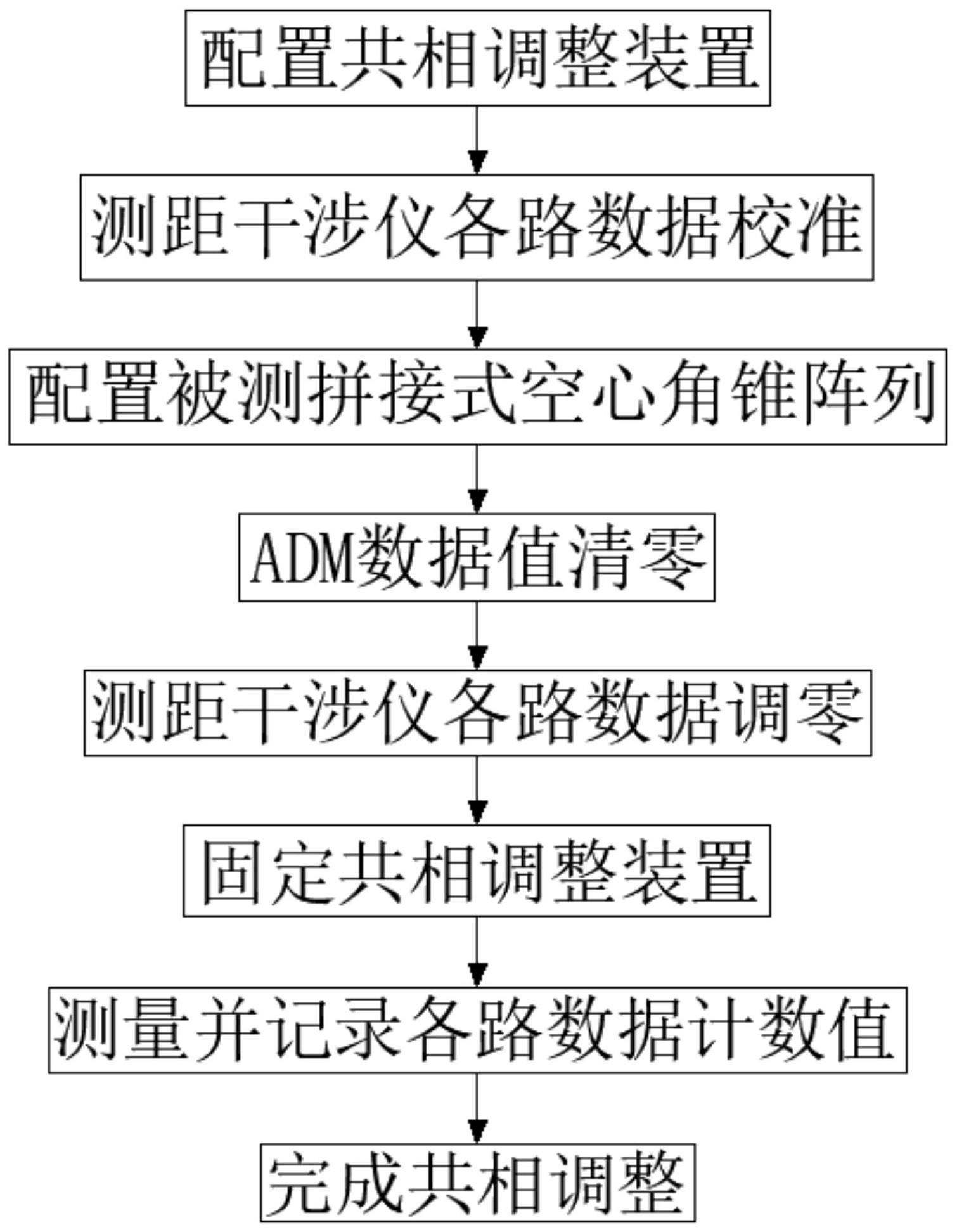
3、一种拼接式空心角锥阵列共相调整方法,包括如下步骤:
4、步骤一:配置共相调整装置;
5、步骤二:测距干涉仪各路数据校准;
6、步骤三:配置被测拼接式空心角锥阵列;
7、步骤四:adm数据值清零;
8、步骤五:测距干涉仪各路数据调零;
9、步骤六:固定共相调整装置;
10、步骤七:测量并记录各路数据计数值;
11、步骤八:完成共相调整;
12、所述共相调整装置包括多光路adm测距干涉仪、标准平面镜和二维调整台。为了解决上述技术问题,并实现相应技术效果,本发明,能够精确定位并调整拼接式空心角锥阵列各子镜的位姿,并通过共相调整装置能够实时监测调整的状态,从而有效的解决拼接式空心角锥阵列的共相调整难题。
13、进一步的技术方案:
14、所述步骤一中,首先将多光路adm测距干涉仪架设在所述二维调整台的上方,然后将所述标准平面镜放置在二维调整台,且所述多光路adm测距干涉仪的多条光路均能照射在标准平面镜上。
15、进一步的:所述步骤二中,当共相调整装置配置完成后,开启多光路adm测距干涉仪,并调整标准平面镜使得所述多光路adm测距干涉仪各光路数据值保持一致,且数据偏差不大于0.1μm。
16、进一步的:所述步骤三中,当各路数据校准后,将共相调整装置中的标准平面镜替换为被测拼接式空心角锥阵列,并使得各路激光能够分别对准被测拼接式空心角锥阵列中各个子镜的中心。
17、进一步的:所述步骤四中,当被测拼接式空心角锥阵列配置完成后,进行adm数据值清零时,以被测拼接式空心角锥阵列中央子镜的adm读数值作为基准数据,并将各路的adm数据值清零。
18、进一步的:所述步骤五中,具体的各路数据调零方法为:调整个子镜x方向的平移、y方向的平移和z方向的平移、倾斜、俯仰,使得多光路adm测距干涉仪各路数据值为零,且数据偏差不大于0.1μm。
19、进一步的:所述步骤七中,当共相调整装置调校并固定完成后,待24小时后再进行测量工作,且在测量时确认多光路adm测距干涉仪各路数据偏差不大于0.1μm,并测量各路数据计数值,各路数据计数值用ln进行编号记录,其中n为各路数据的编号。
20、基于所述共相调整方法的像质评价方法,包括如下步骤:
21、步骤s1:测量各子镜面形数据;
22、步骤s2:整合面形数据和各路数据计数值;
23、步骤s3:坐标交换融合获得拼接面的数据;
24、步骤s4:获取拼接面的多项参数;
25、所述步骤s4中,将步骤s3中获得的拼接面的数据导入数据拼接软件中,计算所得参数包括拼接后的综合面形、回光平行度和能量集中度。
26、进一步的:所述步骤s1中,利用多光路adm测距干涉仪测量各子镜面形数据,各子镜面形数据用[xn,yn,zn]进行编号记录,其中n为各子镜的编号对应各路数据的编号n。
27、进一步的:所述步骤s2中,将各子镜面形数据和各子镜的各路数据计数值进行整合得到[xn,yn,zn+ln],然后将整合所得数据进行坐标交换融合成为拼接面的数据。
28、本发明与现有技术相比,具有如下的优点和有益效果:
29、1、本发明一种拼接式空心角锥阵列共相调整方法,能够精确定位并调整拼接式空心角锥阵列各子镜的位姿,并通过共相调整装置能够实时监测调整的状态,从而有效的解决拼接式空心角锥阵列的共相调整难题。
30、2、本发明一种拼接式空心角锥阵列像质评价方法,基于共相调整方法对拼接式空心角锥阵列完成共相调整后,可有效的对拼接式空心角锥阵列的像质进行评价。
技术特征:
1.一种拼接式空心角锥阵列共相调整方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤一中,首先将多光路adm测距干涉仪(1)架设在所述二维调整台(3)的上方,然后将所述标准平面镜(2)放置在二维调整台(3),且所述多光路adm测距干涉仪(1)的多条光路均能照射在标准平面镜(2)上。
3.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤二中,当共相调整装置配置完成后,开启多光路adm测距干涉仪(1),并调整标准平面镜(2)使得所述多光路adm测距干涉仪(1)各光路数据值保持一致,且数据偏差不大于0.1μm。
4.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤三中,当各路数据校准后,将共相调整装置中的标准平面镜(2)替换为被测拼接式空心角锥阵列,并使得各路激光能够分别对准被测拼接式空心角锥阵列中各个子镜的中心。
5.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤四中,当被测拼接式空心角锥阵列配置完成后,进行adm数据值清零时,以被测拼接式空心角锥阵列中央子镜的adm读数值作为基准数据,并将各路的adm数据值清零。
6.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤五中,具体的各路数据调零方法为:调整个子镜x方向的平移、y方向的平移和z方向的平移、倾斜、俯仰,使得多光路adm测距干涉仪(1)各路数据值为零,且数据偏差不大于0.1μm。
7.根据权利要求1所述的一种拼接式空心角锥阵列共相调整方法,其特征在于,所述步骤七中,当共相调整装置调校并固定完成后,待24小时后再进行测量工作,且在测量时确认多光路adm测距干涉仪(1)各路数据偏差不大于0.1μm,并测量各路数据计数值,各路数据计数值用ln进行编号记录,其中n为各路数据的编号。
8.基于权利要求1~7任意一项所述共相调整方法的拼接式空心角锥阵列像质评价方法,其特征在于,包括如下步骤:
9.根据权利要求8所述的一种拼接式空心角锥阵列像质评价方法,其特征在于,所述步骤s1中,利用多光路adm测距干涉仪(1)测量各子镜面形数据,各子镜面形数据用[xn,yn,zn]进行编号记录,其中n为各子镜的编号对应各路数据的编号n。
10.根据权利要求9所述的一种拼接式空心角锥阵列像质评价方法,其特征在于,所述步骤s2中,将各子镜面形数据和各子镜的各路数据计数值进行整合得到[xn,yn,zn+ln],然后将整合所得数据进行坐标交换融合成为拼接面的数据。
技术总结
本发明公开了一种拼接式空心角锥阵列共相调整方法,依次进行配置共相调整装置;测距干涉仪各路数据校准;配置被测拼接式空心角锥阵列;ADM数据值清零;测距干涉仪各路数据调零;固定共相调整装置;测量并记录各路数据计数值;完成共相调整;能够精确定位并调整拼接式空心角锥阵列各子镜的位姿,并通过共相调整装置能够实时监测调整的状态,从而有效的解决拼接式空心角锥阵列的共相调整难题。同时基于共相调整方法提出一种像质评价方法,测量各子镜面形数据;整合面形数据和各路数据计数值;坐标交换融合获得拼接面的数据;获取拼接面的多项参数;所述步骤S4中,将步骤S3中获得的数据导入数据拼接软件中,便可对拼接式空心角锥阵列进行像质评价。
技术研发人员:景洪伟,熊岚
受保护的技术使用者:四川拉姆达科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!