一种车道级路径规划方法、装置、设备及可读存储介质与流程
本申请涉及自动驾驶,特别涉及一种车道级路径规划方法、装置、设备及可读存储介质。
背景技术:
1、在自动驾驶中,地图的精度会直接影响自动驾驶系统的决策能力,继而直接影响智能汽车的控制,从而影响到智能驾驶的安全性和舒适性。由此可见,对于自动驾驶系统来说,有清晰的地图数据,可以清晰的定位自车的位置,进而可更好的规划出合理平滑的行驶轨迹,其对安全平稳的控制智能车辆起到关键的作用。因此,提供高精度的地图数据是自动驾驶系统的关键,可以有效提升自动驾驶汽车的行驶安全度,强化自动驾驶系统的整体感知能力和决策能力。
2、相关技术中,通过导航地图与视觉传感器的结合来实现自动驾驶车辆的路径规划,但是,由于导航地图的精度不够,以致严重阻碍自动驾驶系统对车辆的监控和精细化控制,以及受到视觉传感器检测范围的限制和外部对视觉传感器的影响,导致无法生成局部的高精度地图,以致轨迹规划精细度不够,进而造成自动驾驶安全性急剧降低。
技术实现思路
1、本申请提供一种车道级路径规划方法、装置、设备及可读存储介质,以解决相关技术因通过导航地图与视觉传感器的结合来实现路径规划而导致精度低的问题。
2、第一方面,提供了一种车道级路径规划方法,包括以下步骤:
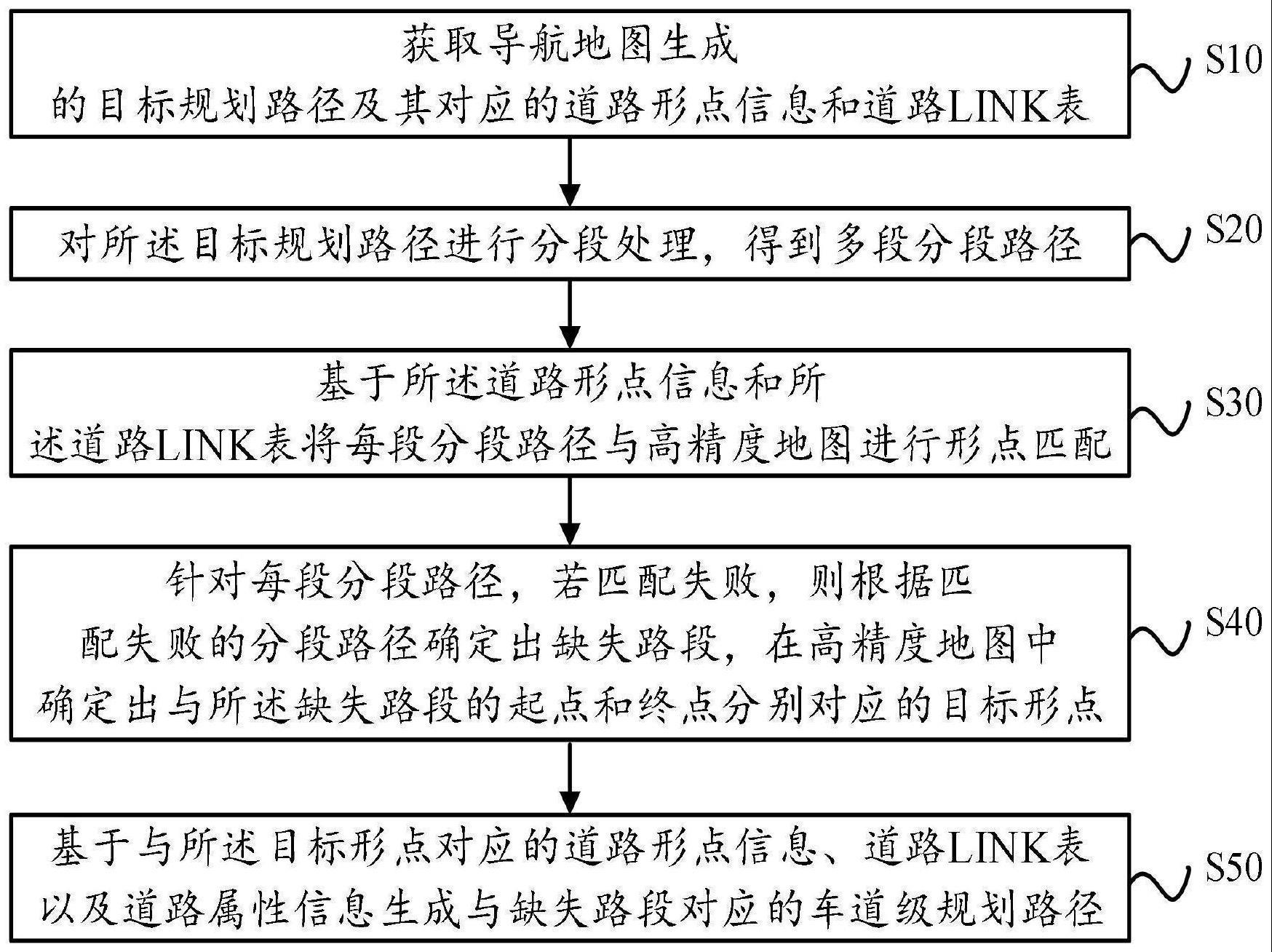
3、获取导航地图生成的目标规划路径及其对应的道路形点信息和道路link表;
4、对所述目标规划路径进行分段处理,得到多段分段路径;
5、基于所述道路形点信息和所述道路link表将每段分段路径与高精度地图进行形点匹配;
6、针对每段分段路径,若匹配失败,则根据匹配失败的分段路径确定出缺失路段,在高精度地图中确定出与所述缺失路段的起点和终点分别对应的目标形点;
7、基于与所述目标形点对应的道路形点信息、道路link表以及道路属性信息生成与缺失路段对应的车道级规划路径。
8、一些实施例中,在所述基于与所述目标形点对应的道路形点信息和道路link表生成与缺失路段对应的车道级规划路径的步骤之后,还包括:
9、控制智能驾驶系统进行功能降级处理;
10、控制降级后的智能驾驶系统基于与缺失路段对应的车道级规划路径进行驾驶。
11、一些实施例中,在所述根据匹配失败的分段路径确定出缺失路段的步骤之后,还包括:
12、判断所述缺失路段的起点是否为目标规划路径的起点;
13、若是,则控制不启动智能驾驶模式;
14、若否,则执行所述在高精度地图中确定出与所述缺失路段的起点和终点分别对应的目标形点。
15、一些实施例中,在所述基于所述道路形点信息和所述道路link表将每段分段路径与高精度地图进行形点匹配的步骤之后,还包括:
16、针对每段分段路径,若匹配成功,则生成与所述分段路径对应的高精度地图的目标道路形点信息、目标道路link表和目标道路属性信息;
17、基于所述目标道路形点信息、所述目标道路link表以及所述目标道路属性信息生成车道级规划路径。
18、第二方面,提供了一种车道级路径规划装置,包括:
19、获取单元,其用于获取导航地图生成的目标规划路径及其对应的道路形点信息和道路link表;
20、分段单元,其用于对所述目标规划路径进行分段处理,得到多段分段路径;
21、匹配单元,其用于基于所述道路形点信息和所述道路link表将每段分段路径与高精度地图进行形点匹配;
22、处理单元,其用于针对每段分段路径,若匹配失败,则根据匹配失败的分段路径确定出缺失路段,在高精度地图中确定出与所述缺失路段的起点和终点分别对应的目标形点;
23、规划单元,其用于基于与所述目标形点对应的道路形点信息、道路link表以及道路属性信息生成与缺失路段对应的车道级规划路径。
24、一些实施例中,所述处理单元还用于:
25、控制智能驾驶系统进行功能降级处理,使降级后的智能驾驶系统基于与缺失路段对应的车道级规划路径进行驾驶。
26、一些实施例中,所述处理单元还用于:
27、判断所述缺失路段的起点是否为目标规划路径的起点;
28、若是,则控制不启动智能驾驶模式;
29、若否,则执行所述在高精度地图中确定出与所述缺失路段的起点和终点分别对应的目标形点。
30、一些实施例中,所述处理单元还用于针对每段分段路径,若匹配成功,则生成与所述分段路径对应的高精度地图的目标道路形点信息、目标道路link表和目标道路属性信息;
31、所述规划单元还用于基于所述目标道路形点信息、所述目标道路link表以及所述目标道路属性信息生成车道级规划路径。
32、第三方面,提供了一种车道级路径规划设备,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现前述的车道级路径规划方法。
33、第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,以实现前述的车道级路径规划方法。
34、本申请提供了一种车道级路径规划方法、装置、设备及可读存储介质,包括获取导航地图生成的目标规划路径及其对应的道路形点信息和道路link表;对所述目标规划路径进行分段处理,得到多段分段路径;基于所述道路形点信息和所述道路link表将每段分段路径与高精度地图进行形点匹配;针对每段分段路径,若匹配失败,则根据匹配失败的分段路径确定出缺失路段,在高精度地图中确定出与所述缺失路段的起点和终点分别对应的目标形点;基于与所述目标形点对应的道路形点信息、道路link表以及道路属性信息生成与缺失路段对应的车道级规划路径。本申请通过高精度地图对因导航地图精度不够以及受限于视觉传感器检测范围有限和易受外界影响导致的路段缺失进行补充,以生成缺失路段的车道级规划路径,即通过高精度地图实现对导航地图和视觉传感器的精度补充,进而有效提高路径规划的精度。
技术特征:
1.一种车道级路径规划方法,其特征在于,包括以下步骤:
2.如权利要求1所述的车道级路径规划方法,其特征在于,在所述基于与所述目标形点对应的道路形点信息和道路link表生成与缺失路段对应的车道级规划路径的步骤之后,还包括:
3.如权利要求1所述的车道级路径规划方法,其特征在于,在所述根据匹配失败的分段路径确定出缺失路段的步骤之后,还包括:
4.如权利要求1所述的车道级路径规划方法,其特征在于,在所述基于所述道路形点信息和所述道路link表将每段分段路径与高精度地图进行形点匹配的步骤之后,还包括:
5.一种车道级路径规划装置,其特征在于,包括:
6.如权利要求5所述的车道级路径规划装置,其特征在于,所述处理单元还用于:
7.如权利要求5所述的车道级路径规划装置,其特征在于,所述处理单元还用于:
8.如权利要求5所述的车道级路径规划装置,其特征在于:
9.一种车道级路径规划设备,其特征在于,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现权利要求1至4中任一项所述的车道级路径规划方法。
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,以实现权利要求1至4中任一项所述的车道级路径规划方法。
技术总结
本申请涉及一种车道级路径规划方法、装置、设备及可读存储介质,涉及自动驾驶技术领域,包括获取导航地图生成的目标规划路径及其对应的道路形点信息和道路LINK表;对目标规划路径进行分段处理,得到多段分段路径;基于道路形点信息和道路LINK表将每段分段路径与高精度地图进行形点匹配;针对每段分段路径,若匹配失败,则根据匹配失败的分段路径确定出缺失路段,在高精度地图中确定出与缺失路段的起点和终点分别对应的目标形点;基于与目标形点对应的道路形点信息、道路LINK表及道路属性信息生成与缺失路段对应的车道级规划路径。本申请通过高精度地图对导航地图和视觉传感器进行精度补充,进而有效提高路径规划的精度。
技术研发人员:许鑫,王长劲,刘杏,方家萌,李兆干,毛竹君,王贝贝
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!