一种基于激光雷达的物体外廓尺寸测量装置及其测量方法与流程
本发明涉及物体轮廓测量,具体为一种基于激光雷达的物体外廓尺寸测量装置及其测量方法。
背景技术:
1、随着经济的快速发展,通过铁路、公路的货物运输量急剧增加。运输前获得运输货物外形尺寸,可以获得准确的安装和加固方案,提高运输安全性。
2、目前对于物体轮廓测量方式多采用将激光雷达测量仪固定安装在测量对象正上方,只能测量小尺寸物体,应用场景窄,将点云数据转为图像,得到物体尺寸,会造成一定的精度损失。
3、也有基于激光点云的车辆外廓尺寸动态测量方法,该方法通过固定安装3个激光雷达,移动车辆来测量车辆长宽高,该方法中车辆必须沿着规定的直线行驶。
技术实现思路
1、本发明的目的在于提供一种基于激光雷达的物体外廓尺寸测量装置及其测量方法,以解决上述背景技术中提出的目前对于物体轮廓测量方式多采用将激光雷达测量仪固定安装在测量对象正上方,只能测量小尺寸物体,应用场景窄,将点云数据转为图像,得到物体尺寸,会造成一定的精度损失。也有基于激光点云的车辆外廓尺寸动态测量方法,该方法通过固定安装3个激光雷达,移动车辆来测量车辆长宽高,该方法中车辆必须沿着规定的直线行驶的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于激光雷达的物体外廓尺寸测量装置,包括:
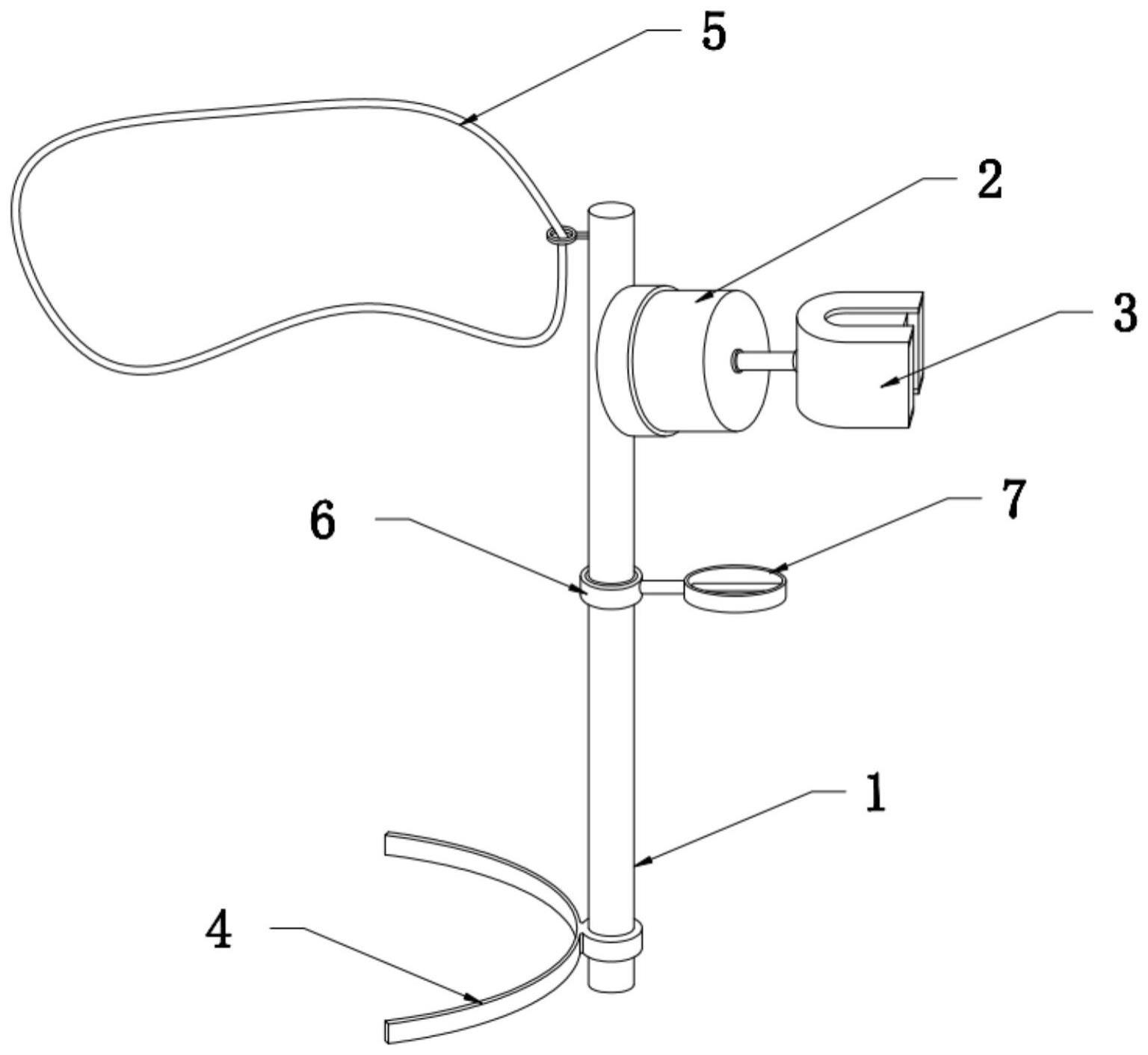
3、立柱,所述立柱的侧壁上端安装有旋转驱动机构,所述旋转驱动机构的输出轴上连接有激光雷达测量仪;
4、手持柄,所述立柱的外壁上套接有轴承,所述手持柄通过支杆连接在轴承的外壁上,所述手持柄通过轴承相对立柱旋转。
5、优选的,所述立柱的外壁下侧设置有支撑板,所述支撑板用于支撑在用户的腰部。
6、优选的,所述支撑板设置为弧形状,且所述支撑板采用橡胶材质。
7、优选的,所述立柱的外壁上侧设置有挂绳,所述挂绳为弹性材质的挂绳,且挂绳用于套在用户的脖子上。
8、优选的,所述旋转驱动机构为驱动马达,所述手持柄为中空的椭圆环状,且手持柄的内部固定连接有手握横杆。
9、一种基于激光雷达的物体外廓尺寸测量方法,该基于激光雷达的物体外廓尺寸测量方法基于基于激光雷达的物体外廓尺寸测量装置,该基于激光雷达的物体外廓尺寸测量方法的具体步骤如下:
10、s1:基于激光雷达测量仪以获取包含待测量物体的三维点云;
11、s2:手持激光雷达测量仪绕待测量物体一周,获取三维点云,并记录了激光雷达测量仪移动轨迹;
12、s3:基于移动轨迹提取待测量物体的三维点云;
13、s4:基于激光雷达测量仪获取的移动轨迹获得一个封闭多边形,遍历所有三维点云,若点在多边形内,保留该点;
14、s5:基于地面滤波方法,分离出地面点g和待测量物体点云o;
15、s6:利用地面点云g拟合平面法线v;
16、s7:计算旋转矩阵r1,使法线v与z轴(0,0,1)平行,r1*v//z;
17、s8:旋转点云o得到点云m,m=r1*o;
18、s9:裁切点云m中突出部分的点云a,保留主体点云b;
19、s10:把点云b投影到xoy平面,得到二维点云c;
20、s11:计算点云c的最小外接矩形,记录长、宽和主轴方向;
21、s12:计算旋转矩阵r2,使主轴方向与x轴方向平行;
22、s13:利用旋转矩阵r2旋转点云m,得到点云k,k=r2*m;
23、s14:此时点云k的最小外接长方体与x,y,z轴平行;
24、s15:把点云k分别投影到xoz和yoz平面得到二维点云kx,ky;
25、s16:分别计算二维点云kx,ky的边界点,连接这些边界点得到物体的轮廓。
26、与现有技术相比,本发明的有益效果是:
27、手持式激光雷达能够迅速、准确的采集被测物体的点云数据,具有高分辨率采集、高精度、抗干扰能力强的优势。使用手持三维激光扫描仪采集被测物体的点云,研发一种物体尺寸智能获取方法将极大提高效率,即保证现场测绘人员的人身安全,降低劳动效率,又提高作业效率。
28、提供了一种基于激光雷达的物体外廓尺寸测量方法,基于手持三维激光扫描仪快速获取任意场景下被测物体的点云,智能绘制出被测物体的三维轮廓。测量准确、快速。降低劳动强度,提高工作效率。
技术特征:
1.一种基于激光雷达的物体外廓尺寸测量装置,其特征在于,包括:
2.根据权利要求1所述的一种基于激光雷达的物体外廓尺寸测量装置,其特征在于:所述立柱(1)的外壁下侧设置有支撑板(4),所述支撑板(4)用于支撑在用户的腰部。
3.根据权利要求2所述的一种基于激光雷达的物体外廓尺寸测量装置,其特征在于:所述支撑板(4)设置为弧形状,且所述支撑板(4)采用橡胶材质。
4.根据权利要求3所述的一种基于激光雷达的物体外廓尺寸测量装置,其特征在于:所述立柱(1)的外壁上侧设置有挂绳(5),所述挂绳(5)为弹性材质的挂绳,且挂绳(5)用于套在用户的脖子上。
5.根据权利要求1所述的一种基于激光雷达的物体外廓尺寸测量装置,其特征在于:所述旋转驱动机构(2)为驱动马达,所述手持柄(7)为中空的椭圆环状,且手持柄(7)的内部固定连接有手握横杆。
6.一种基于激光雷达的物体外廓尺寸测量方法,其特征在于:该基于激光雷达的物体外廓尺寸测量方法基于权利要求1-5任意一项所述的基于激光雷达的物体外廓尺寸测量装置,该基于激光雷达的物体外廓尺寸测量方法的具体步骤如下:
技术总结
本发明属于物体轮廓测量技术领域,具体为一种基于激光雷达的物体外廓尺寸测量装置及其测量方法,包括:立柱,所述立柱的侧壁上端安装有旋转驱动机构,所述旋转驱动机构的输出轴上连接有激光雷达测量仪;手持柄,所述立柱的外壁上套接有轴承,所述手持柄通过支杆连接在轴承的外壁上。手持式激光雷达能够迅速、准确的采集被测物体的点云数据,具有高分辨率采集、高精度、抗干扰能力强的优势。使用手持三维激光扫描仪采集被测物体的点云,研发一种物体尺寸智能获取方法将极大提高效率,即保证现场测绘人员的人身安全,降低劳动效率,又提高作业效率。智能绘制出被测物体的三维轮廓。测量准确、快速。降低劳动强度,提高工作效率。
技术研发人员:徐长江,徐明,戴仕风,陈俊成,仲伟康,朱子煜
受保护的技术使用者:恒岳空感(上海)信息技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!