基于地图的充电桩位姿识别方法、虚拟装置、系统和介质与流程
本发明涉及充电桩,特别是基于地图的充电桩位姿识别方法、虚拟装置、系统和介质。
背景技术:
1、在自动驾驶汽车、扫地机器人、无人叉车等各类机器人越来越普及的今天,充电桩的识别和设置已成为相关企业的的研发重点之一。在移动机器人充电的过程中,确定充电桩的位置、姿态以及其他相关信息对于车辆进行准确充电非常重要。基于地图的充电桩位姿识别就是一个能够通过导航地图等相关信息来确定充电桩位置和姿态的技术。这种技术的基本原理是先将充电桩的位置和方位信息标注在地图上,然后车辆在实际行驶过程中可以通过自身的传感器获取到自身的位置信息,进而结合预加载的地图数据进行计算分析,最终确定充电桩的位置、角度、高度等相关姿态信息。该技术的优点在于可以提高充电桩的定位精度和车辆的自主导航能力,从而提高充电效率和便捷性。同时,该技术还能与其他信息技术融合,例如互联网和云计算,构建一个完整的智能充电桩系统。
2、传统机器人想要实现自主回冲,需要人为设置或输入返航点或借助辅助传感器,机器人到达返航点后再执行和充电桩的返航和矫正。不仅要借助红外等辅助传感器,还对人为设置返航点有较高的精度要求。为了提高本方法的可用性,需要对图像处理得出的充电桩做进一步优化。为此,本发明提供基于地图的充电桩位姿识别方法、虚拟装置、系统和介质。
技术实现思路
1、为了克服现有技术的上述缺点,本发明提供基于地图的充电桩位姿识别方法、虚拟装置、系统和介质。
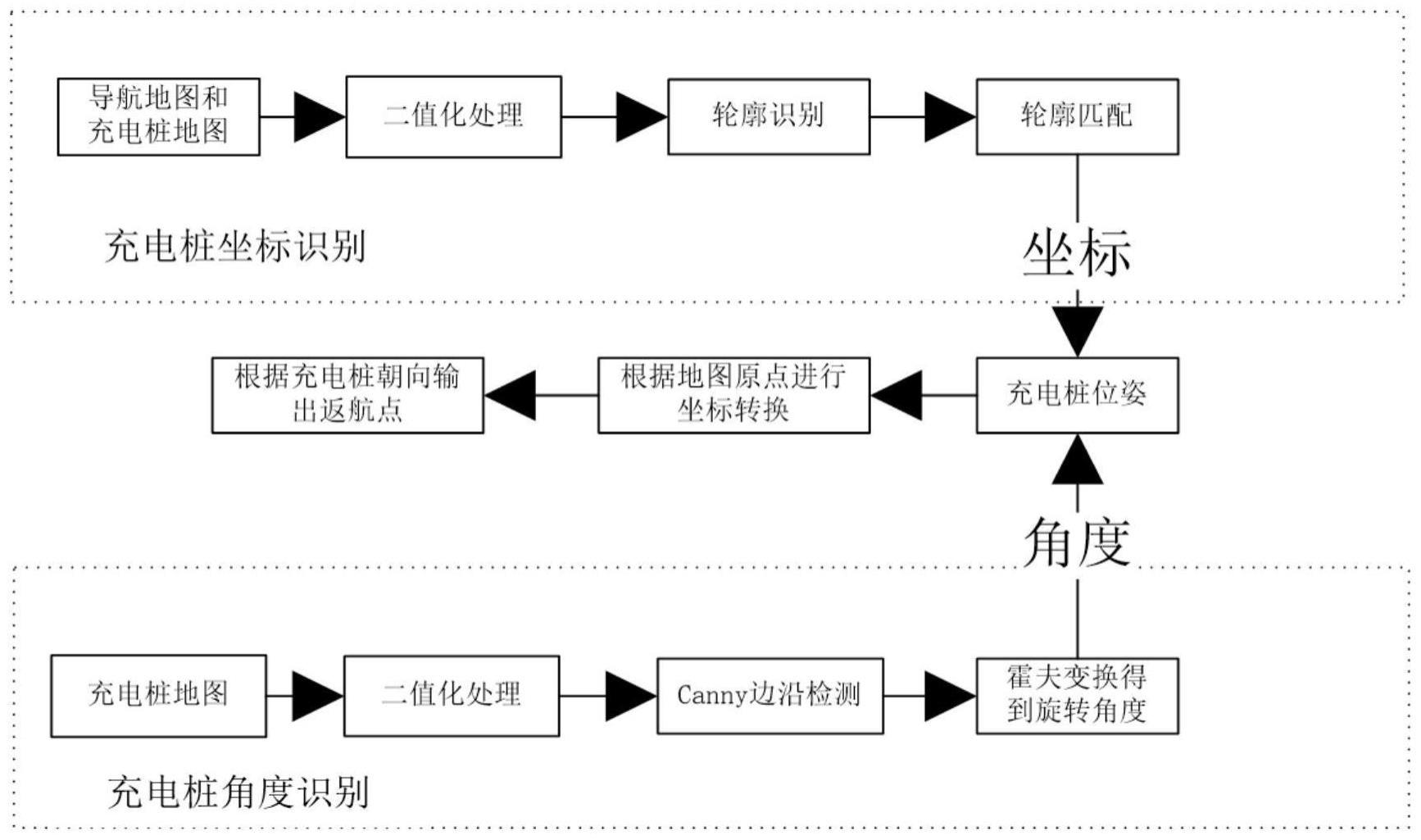
2、本发明解决其技术问题所采用的技术方案是:基于地图的充电桩位姿识别方法,包括以下步骤:获取导航地图和充电桩地图;对两张地图进行轮廓识别和匹配,确定地图充电桩的位姿;基于地图原点,对充电桩进行坐标系转换,确定充电桩的实际位姿;基于充电桩的实际位姿,输出充电桩的返航点。
3、作为本发明的进一步改进:所述充电桩的位姿包括充电桩的坐标和充电桩的角度。
4、作为本发明的进一步改进:所述对两张地图进行轮廓识别和匹配,确定地图充电桩的位姿,包括:对两张地图进行轮廓识别和匹配,进行充电桩坐标识别和充电桩角度识别,确定地图充电桩的位姿。
5、作为本发明的进一步改进:所述充电桩坐标识别,包括:对两张地图进行二值化处理,对进行二值化处理的图像进行轮廓识别和匹配,在导航地图上找到和充电桩地图最近似的轮廓,该轮廓的中心坐标即为充电桩的坐标。
6、作为本发明的进一步改进:所述充电桩角度识别,包括:对充电桩地图进行二值化处理,对进行二值化处理的图像进行canny边沿检测,再通过霍夫变换和笛卡尔坐标系得到充电桩角度。
7、作为本发明的进一步改进:所述通过霍夫变换和笛卡尔坐标系得到充电桩角度,包括:通过霍夫直线函数,确定充电桩的最长边;通过霍夫变换和笛卡尔坐标系下,得到充电桩最长边的斜率和/或角度,即为充电桩角度。
8、作为本发明的进一步改进:所述通过霍夫变换和笛卡尔坐标系得到充电桩角度,包括:包括:通过霍夫直线函数得到图像中所有直线的rho和theta,确定充电桩的最长边;在霍夫变换中,rho为直线到原点的距离,theta则为直线的角度,(x0,y0)为过原点作垂直线到充电桩最长边的垂直交点;通过计算得到笛卡尔坐标系下,充电桩最长边与x轴交点(x1,y1)、充电桩最长边与y轴交点(x2,y2),从而算出充电桩最长边的斜率和角度,即为充电桩角度。
9、作为本发明的进一步改进:所述基于地图原点,对充电桩进行坐标系转换,确定充电桩的实际位姿,包括:基于地图原点,对充电桩进行坐标系转换后得到充电桩的实际坐标和角度,确定充电桩的实际位姿;
10、本发明提供如下技术方案:一种虚拟装置,其特征在于,包括:获取模块,用于获取导航地图和充电桩地图;确定模块,用于对两张地图进行轮廓识别和匹配,确定地图充电桩的位姿;转换模块,用于根据地图原点,对充电桩进行坐标系转换,确定充电桩的实际位姿;输出模块,用于根据充电桩的实际位姿,输出充电桩的返航点。
11、本发明提供如下技术方案:一种基于地图的充电桩位姿识别系统,包括处理器、与所述处理器通信连接的存储器和用于响应用户的触发信号的按钮,其中,所述存储器存储有可被所述处理器执行的指令,所述处理器通过按钮触发以启动上述的基于地图的充电桩位姿识别方法的步骤。
12、本发明提供如下技术方案:一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行上述的基于地图的充电桩位姿识别方法的步骤。
13、与现有技术相比,本发明的有益效果是:
14、本发明提出一种由地图识别的充电桩定位方法,解决无需红外等硬件配合的纯激光自主回冲;通过坐标系转换,解决图像识别的充电桩坐标不是基于地图原点,输出充电桩前的回冲点;通过采用封装算法,利用人机交互方式和按键方式实现充电桩的坐标识别,一键式完成返航点输出和修改,提高算法的泛化能力和易使用性。
技术特征:
1.基于地图的充电桩位姿识别方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于地图的充电桩位姿识别方法,其特征在于:所述充电桩的位姿包括充电桩的坐标和充电桩的角度;
3.根据权利要求2所述的基于地图的充电桩位姿识别方法,其特征在于:所述充电桩坐标识别,包括:
4.根据权利要求3所述的基于地图的充电桩位姿识别方法,其特征在于:所述充电桩角度识别,包括:
5.根据权利要求4所述的基于地图的充电桩位姿识别方法,其特征在于:所述通过霍夫变换和笛卡尔坐标系得到充电桩角度,包括:通过霍夫直线函数,确定充电桩的最长边;通过霍夫变换和笛卡尔坐标系下,得到充电桩最长边的斜率和/或角度,即为充电桩角度。
6.根据权利要求4所述的基于地图的充电桩位姿识别方法,其特征在于:所述通过霍夫变换和笛卡尔坐标系得到充电桩角度,包括:包括:通过霍夫直线函数得到图像中所有直线的rho和theta,确定充电桩的最长边;在霍夫变换中,rho为直线到原点的距离,theta则为直线的角度,(x0,y0)为过原点作垂直线到充电桩最长边的垂直交点;通过计算得到笛卡尔坐标系下,充电桩最长边与x轴交点(x1,y1)、充电桩最长边与y轴交点(x2,y2),从而算出充电桩最长边的斜率和角度,即为充电桩角度。
7.根据权利要求1所述的基于地图的充电桩位姿识别方法,其特征在于:所述基于地图原点,对充电桩进行坐标系转换,确定充电桩的实际位姿,包括:
8.一种虚拟装置,其特征在于,包括:
9.一种基于地图的充电桩位姿识别系统,其特征在于,包括处理器、与所述处理器通信连接的存储器和用于响应用户的触发信号的按钮,其中,所述存储器存储有可被所述处理器执行的指令,所述处理器通过按钮触发以启动权利要求1-7任一项所述的基于地图的充电桩位姿识别方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1-7任一项所述的基于地图的充电桩位姿识别方法的步骤。
技术总结
本发明公开了基于地图的充电桩位姿识别方法、虚拟装置、系统和介质,包括以下步骤:获取导航地图和充电桩地图;对两张地图进行轮廓识别和匹配,确定地图充电桩的位姿;基于地图原点,对充电桩进行坐标系转换,确定充电桩的实际位姿;基于充电桩的实际位姿,输出充电桩的返航点。本发明提出一种由地图识别的充电桩定位方法,解决无需红外等硬件配合的纯激光自主回冲;通过坐标系转换,解决图像识别的充电桩坐标不是基于地图原点,输出充电桩前的回冲点;通过采用封装算法,利用人机交互方式和按键方式实现充电桩的坐标识别,一键式完成返航点输出和修改,提高算法的泛化能力和易使用性。
技术研发人员:李建锋,刘丹,周震峰,杨富雄,张晓宇
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!