雷达标定方法、装置、设备及存储介质与流程
本发明涉及标定,尤其涉及一种雷达标定方法、装置、设备及存储介质。
背景技术:
1、在自动驾驶领域中,毫米波雷达已经成为重要的传感器之一。但是汽车生产中,安装毫米波雷达时,会存在角度误差,将会对雷达的功能产生一定的影响。因此,对雷达进行标定,补偿安装误差是毫米波雷达开发重要环节之一。
2、现有的标定技术中,静态标定方法需要特定的空旷场地,动态标定方法需要设置金属靶布置标定场景,使得对现有标定的场景要求相对较高。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种雷达标定方法、装置、设备及存储介质,旨在解决现有技术对标定的场景要求相对较高的技术问题。
2、为实现上述目的,本发明提供了一种雷达标定方法,所述方法包括以下步骤:
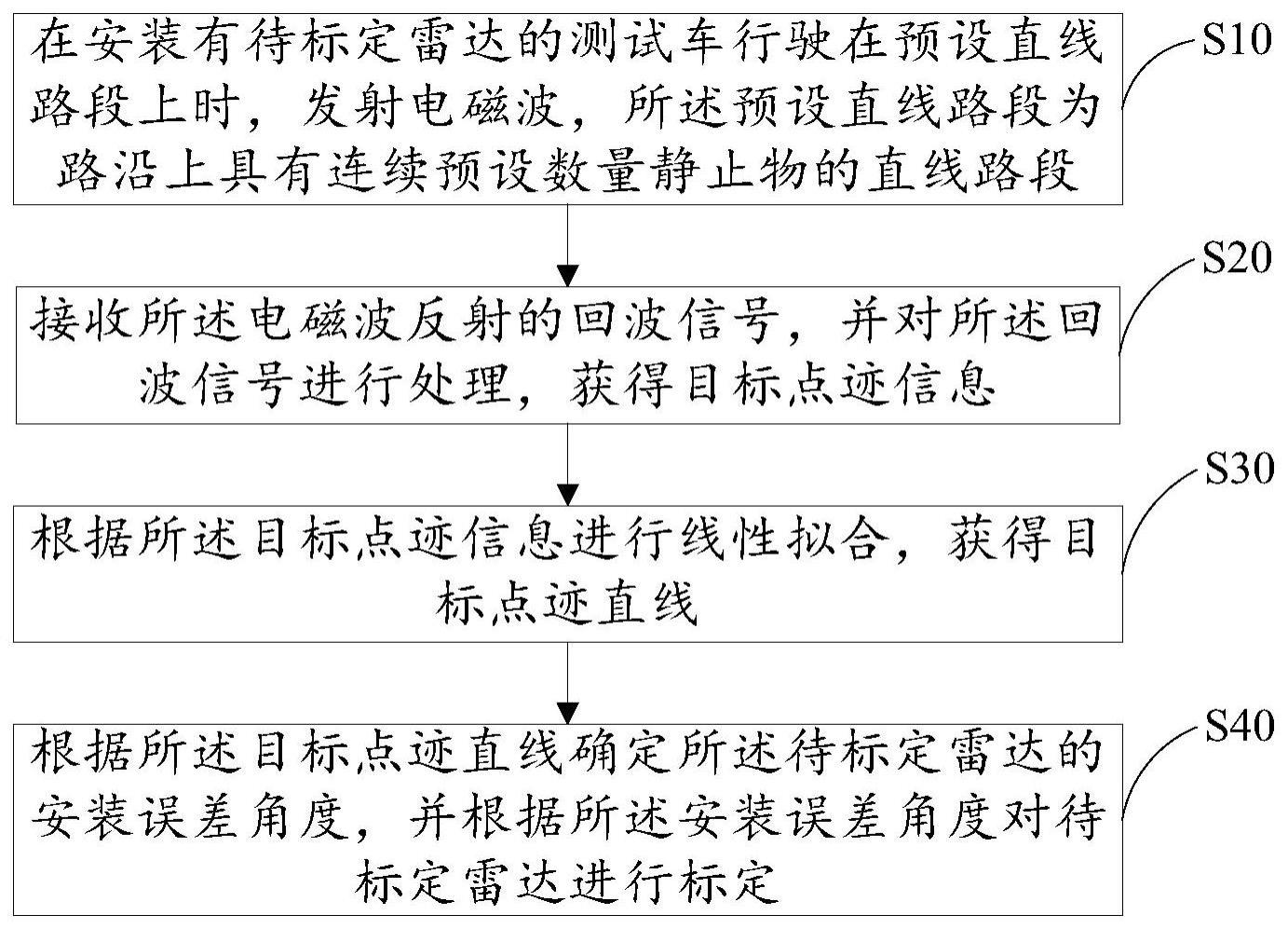
3、在安装有待标定雷达的测试车行驶在预设直线路段上时,发射电磁波,所述预设直线路段为路沿上具有连续预设数量静止物的直线路段;
4、接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息;
5、根据所述目标点迹信息进行线性拟合,获得目标点迹直线;
6、根据所述目标点迹直线确定所述待标定雷达的安装误差角度,并根据所述安装误差角度对待标定雷达进行标定。
7、可选地,所述目标点迹信息包括位置和径向速度,所述接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息的步骤,包括:
8、接收所述电磁波反射的回波信号;
9、对所述回波信号进行处理,获得电磁波探测到的物体至电磁波发射点的位置和径向速度。
10、可选地,所述根据所述目标点迹信息进行线性拟合,获得目标点迹直线的步骤,包括:
11、根据所述目标点迹信息,利用最小二乘法对所述目标点迹信息对应的目标位置点进行线性拟合,获得目标点迹直线。
12、可选地,所述接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息的步骤之后,包括:
13、对所述径向速度进行转化,获得所述目标相对地面的实际速度;
14、根据所述实际速度是否小于预设阈值对所述目标点迹信息进行筛选,获得第一目标点迹信息;
15、相应地,所述根据所述目标点迹信息进行线性拟合,获得目标点迹直线的步骤,包括:
16、根据所述第一目标点迹信息进行线性拟合,获得目标点迹直线。
17、可选地,所述根据所述第一目标点迹信息进行线性拟合,获得目标点迹直线的步骤之后,包括:
18、根据预设距离阈值对所述第一目标点迹信息进行筛选,获得终极点迹信息;
19、将所述终极点迹信息对应的目标位置点进行线性拟合,获得终极点迹直线;
20、相应地,所述根据所述目标点迹直线确定所述待标定雷达的安装误差角度,并根据所述安装误差角度对待标定雷达进行标定的步骤,包括:
21、根据所述终极点迹直线确定所述待标定雷达的安装误差角度,并根据所述安装误差角度对待标定雷达进行标定。
22、可选地,所述根据所述目标点迹信息进行线性拟合,获得目标点迹直线的步骤之后,包括:
23、根据所述目标点迹直线生成包含预设数量的有效安装误差角度的目标点迹直线集合;
24、基于所述目标点迹直线集合获得安装误差角度集合;
25、对所述安装误差角度集合中最大安装误差角度与最小安装误差角度求差,获得误差角度差值;
26、判断所述误差角度差值是否小于等于预设误差阈值;
27、若是,则计算所述安装误差角度集合的平均安装误差角度,根据所述平均安装误差角度对雷达进行标定。
28、可选地,所述判断所述误差角度差值是否小于等于预设误差阈值的步骤之后,包括:
29、若否,则获得所述安装误差角度集合的平均安装误差角度;
30、根据所述平均安装误差角度对所述安装误差角度集合中安装误差角度进行筛选,获得被筛选安装误差角度个数;
31、基于所述被筛选安装误差角度个数重新获取新的对应数量安装误差角度,并将所述新的对应数量安装误差角度添加至筛选后的安装误差角度集合中;
32、根据添加后的安装误差角度集合获得新的误差角度差值;
33、判断所述新的误差角度差值是否小于等于预设误差阈值;
34、若是,则计算所述安装误差角度集合的平均安装误差角度,根据所述平均安装误差角度对雷达进行标定。
35、此外,为实现上述目的,本发明还提出一种雷达标定装置,所述装置包括:
36、发射模块,用于在安装有待标定雷达的测试车行驶在预设直线路段上时,发射电磁波,所述预设直线路段为路沿上具有连续预设数量静止物的直线路段;
37、处理模块,用于接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息;
38、拟合模块,用于根据所述目标点迹信息进行线性拟合,获得目标点迹直线;
39、标定模块,用于根据所述目标点迹直线确定所述待标定雷达的安装误差角度,并根据所述安装误差角度对待标定雷达进行标定。
40、此外,为实现上述目的,本发明还提出一种雷达标定设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的雷达标定程序,所述雷达标定程序配置为实现如上文所述的雷达标定方法的步骤。
41、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有雷达标定程序,所述雷达标定程序被处理器执行时实现如上文所述的雷达标定方法的步骤。
42、本发明公开了一种雷达标定方法、装置、设备及存储介质,该方法通过在安装有待标定雷达的测试车行驶在预设直线路段上时,发射电磁波,所述预设直线路段为路沿上具有连续预设数量静止物的直线路段;接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息;根据所述目标点迹信息进行线性拟合,获得目标点迹直线;根据所述目标点迹直线确定所述待标定雷达的安装误差角度,并根据所述安装误差角度对待标定雷达进行标定。相较于现有动态标定技术需要设置金属靶布置标定场景,由于本发明通过安装有待标定雷达的测试车在沿着路段直线行驶,获得目标点迹直线,再根据目标点迹直线确定待标定雷达的安装误差角度,进行动态标定,克服了对标定的场景要求较高的技术问题,同时也无需联合其他传感器即可实现对车载毫米波雷达的安装角度误差进行标定。
技术特征:
1.一种雷达标定方法,其特征在于,所述方法应用于雷达标定系统,所述方法包括:
2.如权利要求1所述雷达标定方法,其特征在于,所述目标点迹信息包括位置和径向速度,所述接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息的步骤,包括:
3.如权利要求1所述雷达标定方法,其特征在于,所述根据所述目标点迹信息进行线性拟合,获得目标点迹直线的步骤,包括:
4.如权利要求1所述雷达标定方法,其特征在于,所述接收所述电磁波反射的回波信号,并对所述回波信号进行处理,获得目标点迹信息的步骤之后,包括:
5.如权利要求4所述雷达标定方法,其特征在于,所述根据所述第一目标点迹信息进行线性拟合,获得目标点迹直线的步骤之后,包括:
6.如权利要求1至5任一项所述雷达标定方法,其特征在于,所述根据所述目标点迹信息进行线性拟合,获得目标点迹直线的步骤之后,包括:
7.如权利要求6所述雷达标定方法,其特征在于,所述判断所述误差角度差值是否小于等于预设误差阈值的步骤之后,包括:
8.一种雷达标定装置,其特征在于,所述装置包括:
9.一种雷达标定设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的雷达标定程序,所述雷达标定程序配置为实现如权利要求1至7中任一项所述的雷达标定方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有雷达标定程序,所述雷达标定程序被处理器执行时实现如权利要求1至7任一项所述的雷达标定方法的步骤。
技术总结
本发明公开了一种雷达标定方法、装置、设备及存储介质,该方法通过在安装有待标定雷达的测试车行驶在预设直线路段上时,发射电磁波;接收电磁波反射的回波信号,并对回波信号进行处理,获得目标点迹信息;根据目标点迹信息进行线性拟合,获得目标点迹直线;根据目标点迹直线确定待标定雷达的安装误差角度,并根据安装误差角度对待标定雷达进行标定。相较于现有动态标定技术需要设置金属靶布置标定场景,由于本发明通过安装有待标定雷达的测试车沿着路段直线行驶,获得目标点迹直线,再根据目标点迹直线确定待标定雷达的安装误差角度,进行动态标定,克服了对标定的场景要求较高的技术问题。
技术研发人员:陈丽君,刘浩,吕祖文,王珂
受保护的技术使用者:中山联合汽车技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!