弱散射体声学目标强度测量装置和方法与流程
本发明涉及一种水生物体声学目标强度技术,尤其涉及一种弱散射体声学目标强度测量装置和方法。
背景技术:
1、海洋生物的突然增长将会堵塞核电厂的取水口,不利于核电厂过滤系统的运行,易造成多台机组发生紧急停堆,影响核电站的正常工作。毛虾、水母、海藻等浮游生物是造成我国核电厂取水口堵塞的主要因素。对于水体中浮游生物的探测可以通过探测其声学目标强度来实现,然而实现这种方法基础是先要对探测目标物的声学目标强度进行预先的测量。
2、目前的问题在于,现有的测试方法及装置主要面向鱼类的声学目标强度测量,其固定目标的工具多为钢针和较粗的绳索,主要采用悬垂控制法对目标进行测量,这种方式不适合于浮游生物这样的弱散射体,目前也没有专门针对浮游生物这样的弱散射体进行声学目标强度测量的装置。
技术实现思路
1、本发明的目的在于提供一种弱散射体声学目标强度测量装置,该声学目标强度测量装置能够实现对弱散射体进行各种姿态下的声学目标强度测量。
2、本发明的目的还在于提供一种弱散射体声学目标强度测量方法,该声学目标强度测量方法基于所述声学目标强度测量装置来实现对弱散射体的声学目标强度测量。
3、为了实现上述技术目的,本发明采用如下技术方案:
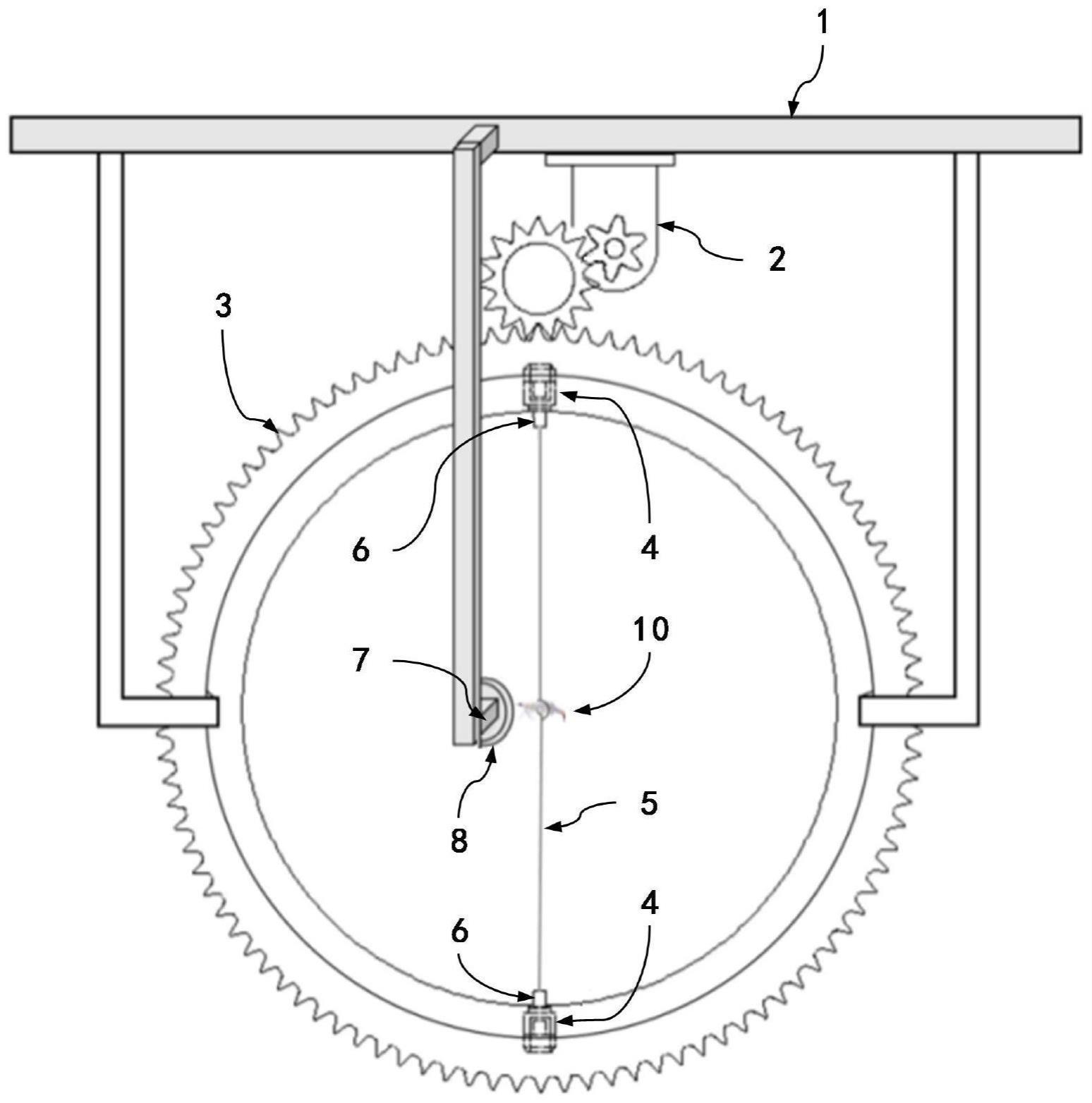
4、一种弱散射体声学目标强度测量装置,包括安装基体、转环和换能器;
5、所述转环可转动地安装在安装基体上,所述转环受驱动装置驱动旋转;
6、所述转环上设置有悬线旋转机构,所述悬线旋转机构设置有一根细线以及驱动细线旋转的机构,所述悬线旋转机构的细线经过转环的中心;
7、所述换能器基于位移机构来安装设置,换能器的探测方向朝向转环的中心,在位移机构的驱动作用下,换能器能够靠近或远离转环的中心。
8、进一步地,所述安装基体为第一行车。
9、进一步地,所述换能器基于位移机构来安装设置,其具体实现的结构形式为:所述位移机构为第二行车,所述换能器安装在第二行车上,第二行车的往复移动能够带动换能器靠近或远离转环的中心。
10、进一步地,所述换能器基于位移机构来安装设置,其具体实现的结构形式为:所述位移机构为伸缩装置,所述换能器通过伸缩装置安装在安装基体上,伸缩装置的伸缩动作能够驱动换能器靠近或远离转环的中心。
11、进一步地,所述悬线旋转机构包括两个安装在转环上的可旋转的夹线头以及一根细线;
12、两个夹线头在转环上呈对称地布置,两个夹线头分别夹紧固定细线的两端,并且使细线绷直,绷直的细线经过转环的中心,对应每个夹线头配置有第二驱动电机,所述第二驱动电机安装在转环上,所述夹线头受第二驱动电机驱动旋转,两个夹线头同时、同向、同转速旋转,则可使两个夹线头之间的细线绕着自身的中轴线旋转。
13、进一步地,悬线旋转机构中设置的细线为鱼线。
14、进一步地,所述换能器处设置有倾角仪。
15、进一步地,所述转环由步进电机驱动旋转。
16、进一步地,所述悬线旋转机构由步进电机驱动运转。
17、一种弱散射体声学目标强度测量方法,该声学目标强度测量方法基于上述的声学目标强度测量装置,所述声学目标强度测量方法包括:
18、根据公式
19、
20、计算出换能器的最小远场距离,式中,l为换能器的最小远场距离,d为换能器直径,λ为入射声波的波长,且λ=c/f,f为换能器中心频率,c为声速;
21、根据换能器的最小远场距离l,调整换能器与转环的中心之间的距离,使换能器与转环的中心之间的距离大于l;
22、将测量目标弱散射体固定在细线上,并将细线固定在悬线旋转机构中,将测量目标弱散射体置于水中,离水面3米处;
23、根据测试需求选择测试测量目标弱散射体水平或垂直方向上的声学目标强度,上位机下发指令同步控制系统;
24、当转环稳定后,悬线旋转机构控制旋转一周,同时开启换能器,使换能器向测量目标弱散射体发射声波,并通过换能器操作软件将实时测量的声学目标强度以及旋转机构对应的度数保存至表格中。
25、在本发明的声学目标强度测量装置中,设置有转环和换能器,在转环上还设置有悬线旋转机构,其中的鱼线用于固定作为测量目标的弱散射体,通过控制转环及其上的悬线旋转机构运转,则可控制测量目标弱散射体的姿态,换能器的探测方向朝向测量目标弱散射体,这样一来,就能够实现对各种不同姿态下的测量目标弱散射体进行声学目标强度的测量,测量得出的各种姿态下的弱散射体的声学目标强度数据用于构建弱散射体的声学模型,从而能够估算不同体型大小的弱散射体目标强度,进而评估目标海域中弱散射体的资源量、密度及分布等情况。
26、本发明的声学目标强度测量装置和方法相对现有技术,其有益效果在于:能够实现对浮游生物这类弱散射体进行各种姿态下的声学目标强度测量。
技术特征:
1.一种弱散射体声学目标强度测量装置,其特征在于:包括安装基体、转环(3)和换能器(8);
2.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述安装基体为第一行车。
3.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述换能器(8)基于位移机构来安装设置,其具体实现的结构形式为:所述位移机构为第二行车,所述换能器(8)安装在第二行车上,第二行车的往复移动能够带动换能器(8)靠近或远离转环(3)的中心。
4.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述换能器(8)基于位移机构来安装设置,其具体实现的结构形式为:所述位移机构为伸缩装置,所述换能器(8)通过伸缩装置安装在安装基体上,伸缩装置的伸缩动作能够驱动换能器(8)靠近或远离转环(3)的中心。
5.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述悬线旋转机构包括两个安装在转环(3)上的可旋转的夹线头(6)以及一根细线;
6.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:悬线旋转机构中设置的细线为鱼线(5)。
7.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述换能器(8)处设置有倾角仪(7)。
8.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述转环(3)由步进电机驱动旋转。
9.根据权利要求1所述弱散射体声学目标强度测量装置,其特征在于:所述悬线旋转机构由步进电机驱动运转。
10.一种弱散射体声学目标强度测量方法,该声学目标强度测量方法基于如权利要求1所述的声学目标强度测量装置,其特征在于:所述声学目标强度测量方法包括:
技术总结
本发明公开了一种弱散射体声学目标强度测量装置和方法。本发明的声学目标强度测量装置包括安装基体、转环(3)和换能器(8);转环可转动地安装在安装基体上,转环受驱动装置驱动旋转;转环上设置有悬线旋转机构,悬线旋转机构设置有细线以及驱动细线旋转的机构,悬线旋转机构的细线经过转环的中心;换能器基于位移机构来安装设置,换能器的探测方向朝向转环的中心,在位移机构的驱动作用下,换能器能够靠近或远离转环的中心。本发明的声学目标强度测量方法基于上述的声学目标强度测量装置,选择测量目标弱散射体水平垂直方向上声学目标强度。本发明的声学目标强度测量装置和方法能够实现对弱散射体进行各种姿态下的声学目标强度测量。
技术研发人员:程婧,杨航,李国栋
受保护的技术使用者:中国水产科学研究院渔业机械仪器研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!