复杂动态环境下的杆臂加速度补偿方法及系统与流程
本发明涉及杆臂加速度补偿的,具体地,涉及一种复杂动态环境下的杆臂加速度补偿方法及系统。
背景技术:
1、动基座传递对准过程采用卡尔曼滤波器,根据所用量测信息的不同可分为传递对准不同的匹配方案,如位置、速度、姿态、角速度和加速度匹配对准方案,其中,加速度匹配需要以子惯导加速度作为量测信息。同时,动基座对准数字仿真需要建立子惯导加速度模型,以建立仿真环境。因此,主子惯导之间的杆臂加速度需要进行精确的补偿。杆臂加速度补偿时,主子惯导之间一般为刚性连接,使用常规的杆臂加速度补偿方法即可。
2、公开号为cn106482746a的中国发明专利文献公开了一种用于混合式惯导系统的加速度计内杆臂的标定与补偿方法,分析了加速度计内杆臂效应的产生机理,并基于此设计了一种变角速度的旋转方案,可实现对全部9个内杆臂参数的激励;同时,建立了以速度误差为观测量的卡尔曼滤波模型,可对内杆臂参数进行估计;此外,还给出了加速度计内杆臂参数的补偿模型。利用混合式惯导系统的三环框架结构,系统无须借助三轴转台等外界设备,即可实现加速度计内杆臂参数的自标定。
3、针对上述中的相关技术,发明人认为当主子惯导之间存在相对运动时,需要根据相对运动的不同,采用特定的杆臂加速度补偿方法,较难进行复杂动态环境下的杆臂加速度补偿。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种复杂动态环境下的杆臂加速度补偿方法及系统。
2、根据本发明提供的一种复杂动态环境下的杆臂加速度补偿方法,包括如下步骤:
3、步骤s1:建立应用环境;
4、步骤s2:在应用环境下,获取主惯导信息、发射架信息和杆臂信息,并根据主惯导信息、发射架信息和杆臂信息获得子惯导加速度信息。
5、优选的,还包括步骤s3:根据子惯导加速度信息作为导弹动基座对准的输入和/或数字仿真加速度建模。
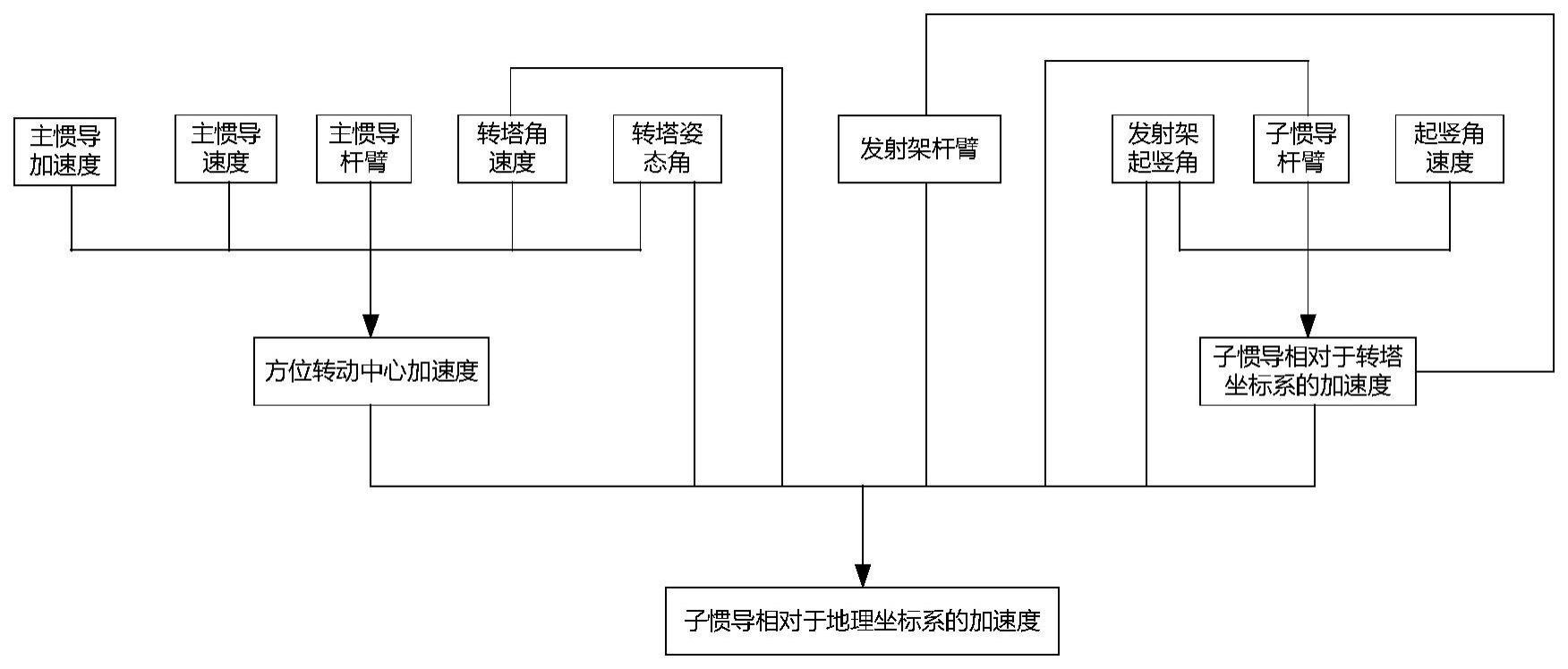
6、优选的,在所述步骤s2中,根据应用环境计算转塔方位转动中心相对于地理坐标系的加速度,根据应用环境计算子惯导相对于转塔坐标系的加速度;
7、根据转塔方位转动中心相对于地理坐标系的加速度以及子惯导相对于转塔坐标系的加速度计算子惯导相对于地理坐标系的加速度。
8、优选的,在所述步骤s1中,建立的应用环境为:转塔安装在运动的战车上,绕方位转动中心进行调转;
9、主惯导固定安装在转塔上;
10、旋转轴固定安装在转塔上;
11、发射架绕着旋转轴在转塔上起竖;
12、位于导弹内部的子惯导固定安装在发射架上。
13、优选的,在所述步骤s2中,由主惯导加速度、主惯导速度、转塔姿态角、转塔角速度以及主惯导杆臂,计算转塔方位转动中心相对于地理坐标系的加速度;
14、由发射架起竖角、起竖角速度、发射架杆臂以及子惯导杆臂,计算子惯导相对于转塔坐标系的加速度;
15、由转塔方位转动中心相对于地理坐标系的加速度、转塔姿态角、转塔角速度、发射架起竖角、发射架杆臂、子惯导杆臂以及子惯导相对于转塔坐标系的加速度,计算子惯导相对于地理坐标系的加速度。
16、优选的,在所述步骤s1中,建立相关坐标系,相关坐标系包括惯性参考坐标oixiyizi,地球坐标系oexeyeze;地理坐标系otxtytzt;转塔坐标系ozxzyzzz;发射架坐标系ojxjyjzj;
17、其中,oi表示原点取地心;oixi轴指向春分点;oizi轴指向地球自转轴;oiyi轴为右手定则确定的轴;oe表示原点取地心;oeze轴指向极轴方向;oexe轴在赤道平面与本初子午面的交线上;oeye轴为右手定则确定的轴;ot表示原点取导弹质心;otxt轴指向北;otyt轴指向天;otzt轴指向东;oz表示原点取在转塔方位转动中心;ozxz轴指向发射装置前向方向;ozyz垂直于发射装置平面,向上为正;ozzz垂直于xzozyz平面,且与ozxz轴和ozyz轴满足右手准则;oj表示原点取发射架高低旋转中心;ojxj为沿发射架高低指向方向,指向弹头为正;ojyj在发射集装箱纵对称平面内,垂直于ojxj,向上为正;ojzj垂直于xjojyj平面,且与ojxj轴和ojyj轴满足右手准则。
18、优选的,在所述步骤s2中,转塔坐标系到地理坐标系的姿态矩阵为
19、
20、其中,ψz为转塔偏航角;θz为转塔俯仰角;φz为转塔滚转角;
21、转塔方位转动中心oz相对于地理坐标系的加速度为
22、
23、
24、
25、
26、其中,表示主惯导在当地地理坐标系下的加速度;表示转塔坐标系相对于惯性坐标系的转动角速度在转塔坐标系下的投影;t表示地理坐标系;tg表示三角函数正切;表示的微分,由当前与上一周期的差值除以周期得到;分别表示三个方向的分量;表示三个方向的分量;表示主惯导中心相对于转塔转动中心的杆臂在转塔坐标系下的投影;ωie表示地球自转速率;l表示纬度;表示主惯导在当地地理坐标系下北向速度;表示主惯导在当地地理坐标系下天向速度;表示主惯导在当地地理坐标系下东向速度;表示的转置;rn表示卯酉圆曲率半径;rm表示子午圆曲率半径。
27、优选的,在所述步骤s2中,子惯导相对于转塔坐标系的加速度为
28、
29、
30、
31、
32、其中,θj表示发射架起竖角;表示的转置;为发射架坐标系到转塔坐标系的转换矩阵;为发射架俯仰角速度;表示为的微分,由当前与上一周期的差值除以周期得到;表示三个方向的分量;表示三个方向的分量;为发射架相对于转塔转动中心的杆臂在转塔坐标系下的投影;为子惯导相对于发射架高低旋转中心的杆臂在发射架坐标系下的投影。
33、优选的,子惯导相对于地理坐标系的加速度为
34、
35、
36、其中,表示中间计算量。
37、根据本发明提供的一种复杂动态环境下的杆臂加速度补偿系统,包括如下模块:
38、模块m1:建立应用环境;
39、模块m2:在应用环境下,获取主惯导信息、发射架信息和杆臂信息,并根据主惯导信息、发射架信息和杆臂信息获得子惯导加速度信息。
40、与现有技术相比,本发明具有如下的有益效果:
41、1、本发明不仅适用于主子惯导之间杆臂固定的情况,而且适用于复杂动态环境;
42、2、本发明中子惯导加速度信息可以作为导弹动基座对准的输入;
43、3、本发明中子惯导加速度信息可以用于数字仿真加速度建模。
技术特征:
1.一种复杂动态环境下的杆臂加速度补偿方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,还包括步骤s3:根据子惯导加速度信息作为导弹动基座对准的输入和/或数字仿真加速度建模。
3.根据权利要求1所述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s2中,根据应用环境计算转塔方位转动中心相对于地理坐标系的加速度,根据应用环境计算子惯导相对于转塔坐标系的加速度;
4.根据权利要求1所述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s1中,建立的应用环境为:转塔安装在运动的战车上,绕方位转动中心进行调转;
5.根据权利要求1所述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s2中,由主惯导加速度、主惯导速度、转塔姿态角、转塔角速度以及主惯导杆臂,计算转塔方位转动中心相对于地理坐标系的加速度;
6.根据权利要求1所述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s1中,建立相关坐标系,相关坐标系包括惯性参考坐标oixiyizi,地球坐标系oexeyeze;地理坐标系otxtytzt;转塔坐标系ozxzyzzz;发射架坐标系ojxjyjzj;
7.根据权利要求5述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s2中,转塔坐标系到地理坐标系的姿态矩阵为
8.根据权利要求5述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,在所述步骤s2中,子惯导相对于转塔坐标系的加速度为
9.根据权利要求5述的复杂动态环境下的杆臂加速度补偿方法,其特征在于,子惯导相对于地理坐标系的加速度为
10.一种复杂动态环境下的杆臂加速度补偿系统,其特征在于,包括如下模块:
技术总结
本发明提供了一种复杂动态环境下的杆臂加速度补偿方法及系统,包括如下步骤:步骤S1:建立应用环境;步骤S2:在应用环境下,获取主惯导信息、发射架信息和杆臂信息,并根据主惯导信息、发射架信息和杆臂信息获得子惯导加速度信息。本发明能够根据子惯导加速度信息作为导弹动基座对准的输入和/或数字仿真加速度建模,不仅适用于主子惯导之间杆臂固定的情况,而且适用于复杂动态环境。
技术研发人员:袁杰波,宋振华,刘伟鹏,张斌,李建东,张佳梁,李晨,许新鹏,崔闪,韩琳,秦峰,吴镇,王晖辉,李云龙
受保护的技术使用者:上海机电工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!