路径规划方法及相关设备
本申请涉及自动驾驶路径规划,尤其涉及一种路径规划方法及相关设备。
背景技术:
1、现有技术中,在路径规划时,决策被放置于云端服务器,因此遇到通信问题比如车辆驶入通信盲区时,会完全丧失决策能力而“离线”,且在正常工作过程中决策周期长,无法应对高速等对决策速度要求高的场景,另外,对园区的智能化要求较高,需要大面积铺设物联网设备辅助通信,成本高昂。
2、还有的现有技术中,构建斥力势场的所有感知信息都来自本地传感器感知,因此势场函数规划能力往往受限于传感器工作频率和感知精度,其次其未考虑道路上驾驶个体在可合作方面的差异性,决策效率相对不如联网决策的效果好;最后受限于感知来源的唯一性,对道路上动态障碍物的运动趋势和运动意图的解释性存在不足。
技术实现思路
1、有鉴于此,本申请的目的在于提出一种路径规划方法及相关设备。
2、基于上述目的,本申请提供了一种路径规划方法,包括:
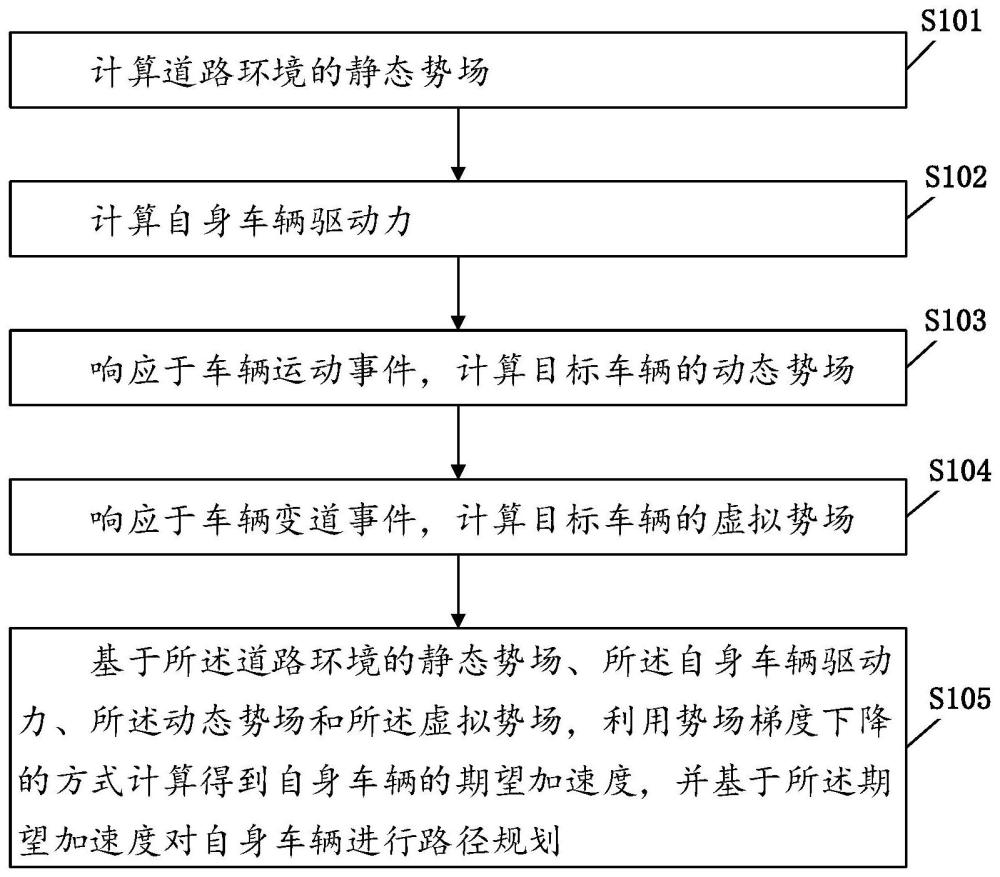
3、计算道路环境的静态势场;
4、计算自身车辆驱动力;
5、响应于车辆运动事件,计算目标车辆的动态势场;
6、响应于车辆变道事件,计算目标车辆的虚拟势场;
7、基于所述道路环境的静态势场、所述自身车辆驱动力、所述动态势场和所述虚拟势场,利用势场梯度下降的方式计算得到自身车辆的期望加速度,并基于所述期望加速度对自身车辆进行路径规划。
8、在一种可能的实现方式中,所述道路环境的静态势场包括车辆静态势场、车道线静态势场、道路边界静态势场和固定路障静态势场;
9、所述计算道路环境的静态势场包括:
10、计算所述车辆静态势场、所述车道线静态势场、所述道路边界静态势场和所述固定路障静态势场之和,得到所述道路环境的静态势场。
11、在一种可能的实现方式中,所述计算所述车辆静态势场、所述车道线静态势场、所述道路边界静态势场和所述固定路障静态势场之和,得到所述道路环境的静态势场,包括:
12、基于目标车辆在弗洛纳坐标系下的位置坐标、目标车辆的尺寸和质量,计算得到所述车辆静态势场;
13、基于车道线的横向坐标计算得到所述车道线势场;
14、基于车道边界的横向坐标计算得到所述道路边界势场;
15、基于固定路障边界或可感知边界的坐标点,计算得到所述固定路障势场;
16、计算所述车辆静态势场、所述车道线静态势场、所述道路边界静态势场和所述固定路障静态势场之和,得到所述道路环境的静态势场。
17、在一种可能的实现方式中,所述驱动力包括前进驱动力和变道驱动力;
18、所述计算自身车辆的驱动力,包括:
19、基于自身车辆质量和自身车辆的期望速度计算得到所述前进驱动力;
20、响应于自身车辆变道意图,基于所述车道线静态势场计算得到所述变道驱动力。
21、在一种可能的实现方式中,所述计算目标车辆的动态势场,包括:
22、基于安全距离、动态因子和修正后的道路场景欧氏距离计算得到所述目标车辆的动态势场。
23、在一种可能的实现方式中,所述动态因子中的参数组合为动态量敏感度;
24、所述方法,还包括:
25、基于下一代仿真所需车辆轨迹的支持数据集,以及采用自适应巡航控制和协同自适应巡航控制模型对以上数据集衍生得到的数据集,将加权的速度和加速度波动之和最小作为优化目标,采用超参空间随机矢量探索的方法,对所述动态量敏感度进行优化,得到优化后的动态量敏感度;
26、基于所述优化后的动态量敏感度,计算得到所述动态因子。
27、在一种可能的实现方式中,所述响应于车辆变道事件,计算目标车辆的虚拟势场,包括:
28、响应于车辆变道事件,获取车辆的变道方案;
29、基于获取的变道方案,得到所述目标车辆变道后的期望坐标和期望速度;
30、基于所述期望坐标和所述期望速度,计算所述目标车辆的虚拟势场。
31、基于同一发明构思,本申请实施例还提供了一种路径规划装置,包括:
32、第一计算模块,被配置为计算道路环境的静态势场;
33、第二计算模块,被配置为计算自身车辆驱动力;
34、第三计算模块,被配置为响应于车辆运动事件,计算目标车辆的动态势场;
35、第四计算模块,被配置为响应于车辆变道事件,计算目标车辆的虚拟势场;
36、路径规划模块,被配置为基于所述道路环境的静态势场、所述自身车辆驱动力、所述动态势和所述虚拟势场,利用势场梯度下降的方式计算得到自身车辆的期望加速度,并基于所述期望加速度对自身车辆进行路径规划。
37、基于同一发明构思,本申请实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任意一项所述的路径规划方法。
38、基于同一发明构思,本申请实施例还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行上述任一所述的路径规划方法。
39、从上面所述可以看出,本申请提供的路径规划方法及相关设备,通过计算道路环境的静态势场;计算自身车辆驱动力;响应于车辆运动事件,计算目标车辆的动态势场;响应于车辆变道事件,计算目标车辆的虚拟势场;基于所述道路环境的静态势场、所述自身车辆驱动力、所述动态势场和所述虚拟势场,利用势场梯度下降的方式计算得到自身车辆的期望加速度,并基于所述期望加速度对自身车辆进行路径规划。本申请实施例在构建静态势场和驱动力的基础上,使用安全距离和动态感知两大因子构建动态势场来量化目标车辆纵向风险,同时通过目标车辆驾驶意图的预测和网联信息来构建虚拟势场,将目标车辆的横向风险和意图映射到道路势场,形成表现驾驶意图的虚拟势场,通过虚拟势场作用,自身车辆做出相应决策。以及分析异质个体安全反应时间差异来源,给出安全车头时距反应时间的选择策略;分析异质个体运动特征,给出动态量敏感度的差异化参数选择策略。利用异质个体可信度和跟驰行为的差异性,通过差异化的参数策略可实现更高的行车安全性和舒适性。
技术特征:
1.一种路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述道路环境的静态势场包括车辆静态势场、车道线静态势场、道路边界静态势场和固定路障静态势场;
3.根据权利要求2所述的方法,其特征在于,所述计算所述车辆静态势场、所述车道线静态势场、所述道路边界静态势场和所述固定路障静态势场之和,得到所述道路环境的静态势场,包括:
4.根据权利要求1所述的方法,其特征在于,所述驱动力包括前进驱动力和变道驱动力;
5.根据权利要求1所述的方法,其特征在于,所述计算目标车辆的动态势场,包括:
6.根据权利要求5所述的方法,其特征在于,所述动态因子中的参数组合为动态量敏感度;
7.根据权利要求1所述的方法,其特征在于,所述响应于车辆变道事件,计算目标车辆的虚拟势场,包括:
8.一种路径规划装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任意一项所述的方法。
10.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,其特征在于,所述计算机指令用于使计算机执行权利要求1至7任一所述方法。
技术总结
本申请提供一种路径规划方法及相关设备。所述方法包括:计算道路环境的静态势场、自身车辆驱动力;响应于车辆运动事件,计算目标车辆的动态势场;响应于车辆变道事件,计算目标车辆的虚拟势场;基于道路环境的静态势场、自身车辆驱动力、动态势场和虚拟势场,利用势场梯度下降的方式计算得到自身车辆的期望加速度,以对自身车辆进行路径规划。本申请实施例在构建静态势场和驱动力的基础上,使用安全距离和动态感知两大因子构建动态势场来量化目标车辆纵向风险,同时通过目标车辆驾驶意图的预测和网联信息来构建虚拟势场,将目标车辆的横向风险和意图映射到道路势场,形成表现驾驶意图的虚拟势场,最终通过虚拟势场作用,自身车辆做出相应决策。
技术研发人员:王鲁晗,师正睿,王成于,郑伟,温向明
受保护的技术使用者:北京邮电大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!