一种基于速度误差变换的非线性初始对准方法与流程
本发明涉及一种基于速度误差变换的非线性初始对准方法,属于惯性导航。
背景技术:
1、惯性导航系统具有完全自主,高度隐蔽,强抗干扰,导航信息全面,实时且连续的重要特性,已成为当今在陆海空天众多领域得到广泛应用的一种导航方式,成为各种制导武器和武器平台必备的关键设备之一。
2、初始对准是惯性导航系统进行导航解算前的必经阶段,常用方法是先通过粗对准获得粗略姿态,再通过精对准(线性模型)进一步获取更准确的姿态。但在实际应用中,粗对准结果可能达不到精对准的小失准角要求,故需采用非线性模型进大失准角对准,这样能更准确反映系统的传播特性,得到较好的滤波效果。
3、现有非线性模型包括直接模型和间接模型,间接模型能够更快地进行误差反馈,故间接模型更常用些。然而不论是线性模型还是非线性模型,速度误差微分方程中均包含仪表直接输出的比力,在振动环境下或低精度仪表(例如mems)工况中会产生较大的误差,从而影响系统最终的导航精度。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种基于速度误差变换的非线性初始对准方法,可在大失准角下获得更快的滤波收敛速度和更好的初始对准精度。
2、本发明的技术解决方案是:一种基于速度误差变换的非线性初始对准方法,根据实时获取的载体的
3、获得对准时载体所在位置的经纬高信息,初始姿态角设置为零,进行姿态更新和速度更新;
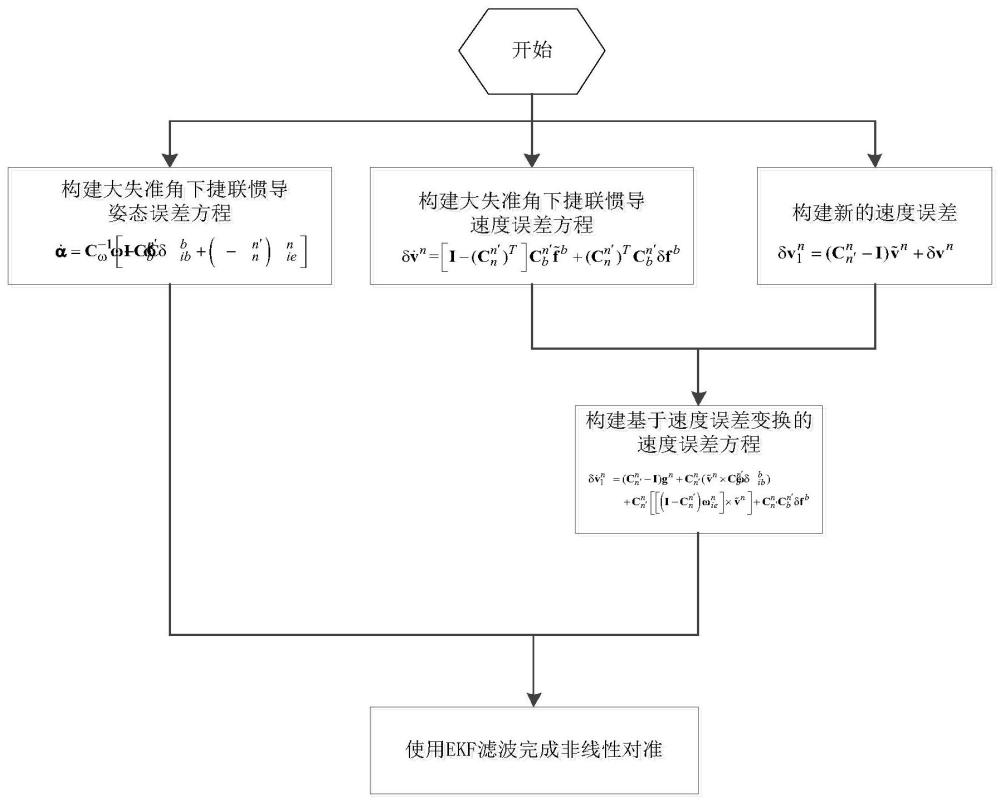
4、根据实时更新的姿态数据和速度数据,构建原始大失准角姿态误差方程和原始大失准角速度误差方程;
5、根据实时更新的姿态数据和速度数据,以及计算速度与实际速度方向的差异,构建新的速度误差状态方程;
6、根据所述原始大失准角速度误差方程和所述新的速度误差状态方程构建速度误差状态变换下的速度误差模型和量测模型;
7、根据所述原始大失准角姿态误差方程和所述速度误差状态变换下的速度误差模型和量测模型完成精对准滤波。
8、进一步地,所述速度误差状态变换下的速度误差模型为
9、
10、其中,b系为载体坐标系,n系为导航坐标系,为修正速度误差,为修正速度误差的一次导数,为陀螺角速度测量误差,为加速度计比力输出,δfb为加速度计比力测量误差,表示b系到n系的计算旋转矩阵,为转换矩阵,i为三阶单位矩阵,为导航系误差,gn为导航系下的重力加速度,为地球自转角速度,为惯导计算速度。
11、进一步地,所述速度误差状态变换下的量测模型为
12、
13、其中,z为量测矢量,为修正速度误差,为导航系误差,i为三阶单位矩阵,为惯导计算速度,wv为量测噪声。
14、进一步地,所述完成精对准滤波的方法为ekf方法。
15、一种基于速度误差变换的非线性初始对准系统,包括:
16、第一模块,获得对准时载体所在位置的经纬高信息,初始姿态角设置为零,进行姿态更新和速度更新;
17、第二模块,根据实时更新的姿态数据和速度数据,构建原始大失准角姿态误差方程和原始大失准角速度误差方程;
18、第三模块,根据实时更新的姿态数据和速度数据,以及计算速度与实际速度方向的差异,构建新的速度误差状态方程;
19、第四模块,根据所述原始大失准角速度误差方程和所述新的速度误差状态方程构建速度误差状态变换下的速度误差模型和量测模型;
20、第五模块,根据所述原始大失准角姿态误差方程和所述速度误差状态变换下的速度误差模型和量测模型完成精对准滤波。
21、进一步地,所述速度误差状态变换下的速度误差模型为
22、
23、其中,b系为载体坐标系,n系为导航坐标系,为修正速度速度误差,为修正速度误差的一次导数,为陀螺角速度测量误差,为加速度计比力输出,δfb为加速度计比力测量误差,表示b系到n系的计算旋转矩阵,为转换矩阵,i为三阶单位矩阵,为导航系误差,gn为导航系下的重力加速度,为地球自转角速度,为惯导计算速度。
24、进一步地,所述速度误差状态变换下的量测模型为
25、
26、其中,z为量测矢量,为修正速度误差,为导航系误差,i为三阶单位矩阵,为惯导计算速度,wv为量测噪声。
27、进一步地,所述完成精对准滤波的方法为ekf方法。
28、一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现所述一种基于速度误差变换的非线性初始对准方法的步骤。
29、一种基于速度误差变换的非线性初始对准设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述的处理器执行所述的计算机程序时实现所述一种基于速度误差变换的非线性初始对准方法的步骤。
30、本发明与现有技术相比的优点在于:
31、本发明方法通过速度误差变换,构建了大失准角下的修正速度误差模型,由重力项gn代替了加速度计比力输出项从而获得更快的滤波收敛速度和更好的初始对准精度,进而获得更好的系统导航精度。
技术特征:
1.一种基于速度误差变换的非线性初始对准方法,其特征在于,根据实时获取的载体的
2.根据权利要求1所述的一种基于速度误差变换的非线性初始对准方法,其特征在于,所述速度误差状态变换下的速度误差模型为
3.根据权利要求1所述的一种基于速度误差变换的非线性初始对准方法,其特征在于,所述速度误差状态变换下的量测模型为
4.根据权利要求1所述的一种基于速度误差变换的非线性初始对准方法,其特征在于,所述完成精对准滤波的方法为ekf方法。
5.一种基于速度误差变换的非线性初始对准系统,其特征在于,包括:
6.根据权利要求5所述的一种基于速度误差变换的非线性初始对准系统,其特征在于,所述速度误差状态变换下的速度误差模型为
7.根据权利要求5所述的一种基于速度误差变换的非线性初始对准系统,其特征在于,所述速度误差状态变换下的量测模型为
8.根据权利要求5所述的一种基于速度误差变换的非线性初始对准系统,其特征在于,所述完成精对准滤波的方法为ekf方法。
9.一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,其特征在于,所述的计算机程序被处理器执行时实现如权利要求1~权利要求4任一所述方法的步骤。
10.一种基于速度误差变换的非线性初始对准设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于:所述的处理器执行所述的计算机程序时实现如权利要求1~权利要求4任一所述方法的步骤。
技术总结
一种基于速度误差变换的非线性初始对准方法,属于惯性导航技术领域。本发明方法通过速度误差变换,构建了大失准角下的修正速度误差模型,由重力项代替了加速度计比力输出项,从而获得更快的滤波收敛速度和更好的初始对准精度,进而获得更好的系统导航精度。
技术研发人员:宁晓戈,黄继勋,王宁,张峰,杨鹏
受保护的技术使用者:北京航天时代光电科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!