一种电机定子同轴度测量方法及装置
本发明涉及电机定子同轴度测量领域,具体涉及一种电机定子同轴度测量方法及装置。
背景技术:
1、电动机是新能源汽车系统中特别重要的零部件,它是利用定子绕组产生旋转磁场并作用于转子形成磁电动力旋转扭矩。而定子和转子的同轴度直接决定转子旋转时的稳定性,如果同轴度稍差一点,则会引起振动和噪声,如果同轴度更差就会造成电机局部烧损。因此工厂往往会对电动机进行测量,以监控产品的性能。
2、针对电动机同轴度测量,因为其是内壁测量,受限于空间大小,很多常见的同轴度检测设备如圆柱度仪,就无法应用。目前汽车制造商一般都应用三坐标测量机进行测量。虽然该方法测量精度高,但一般只适合抽样检查,因为其检测流程复杂、耗时较长。因此一些人研发了更加方便的检具,以期缩短时间,但效果一般。另外三坐标测量机体积较大不适合与产线结合使用,并且该设备成本比较高。
技术实现思路
1、针对现有技术的不足,本发明提供了一种电机定子同轴度测量方法及装置,通过对采集相机的标定处理后,对采集图像再进行分析,提升测量效率与准确率。
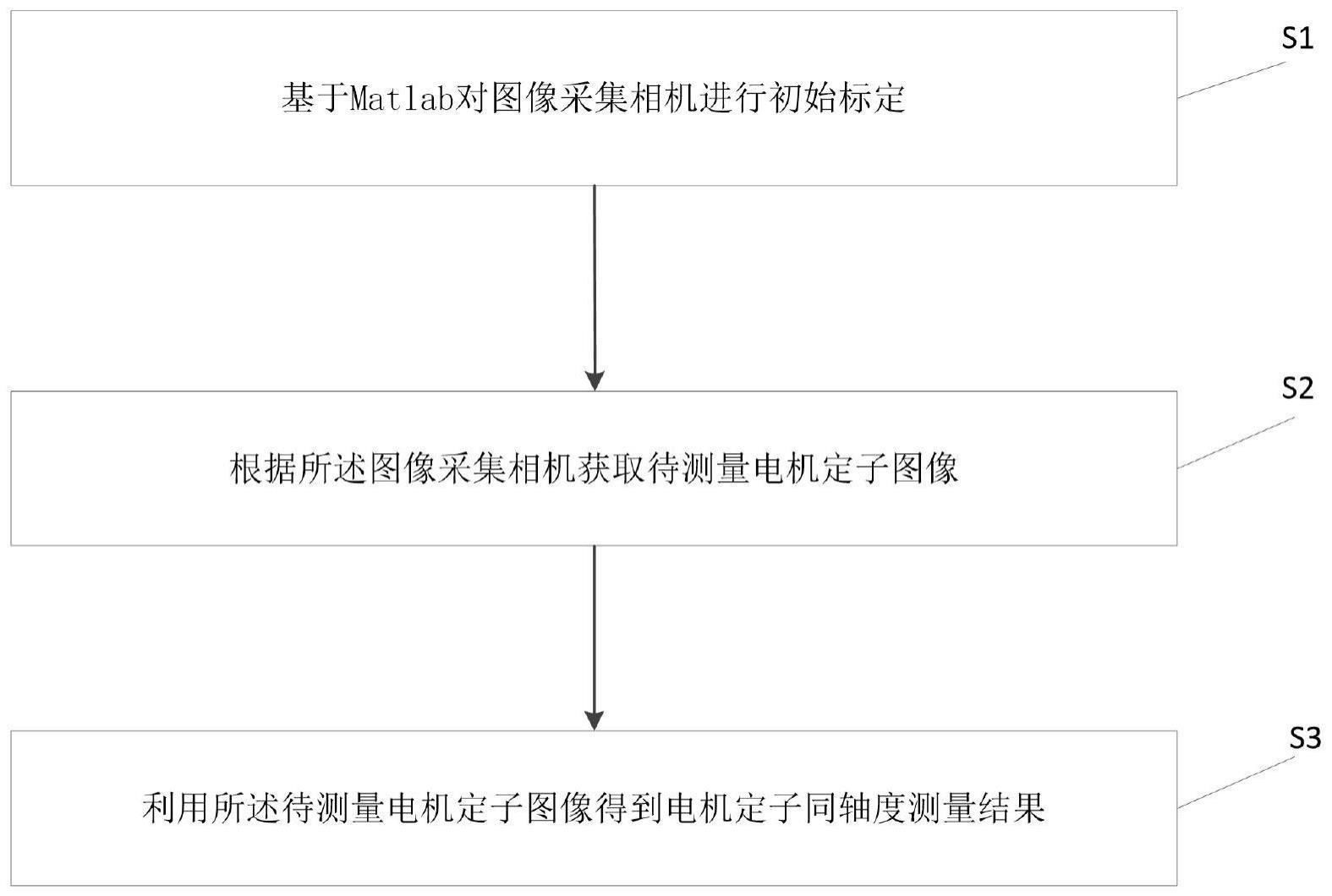
2、为实现上述目的,本发明提供了一种电机定子同轴度测量方法,包括:
3、基于matlab对图像采集相机进行初始标定;
4、根据所述图像采集相机获取待测量电机定子图像;
5、利用所述待测量电机定子图像得到电机定子同轴度测量结果。
6、优选的,所述基于matlab对图像采集相机进行初始标定包括:
7、基于matlab对图像采集相机进行标定得到图像采集相机内参;
8、利用图像采集相机对应激光器分别获取激光照射棋盘格与非激光照射棋盘格;
9、利用所述激光照射棋盘格与非激光照射棋盘格基于opencv得到光条三维坐标;
10、利用所述光条三维坐标建立光条三维坐标集合;
11、利用所述光条三维坐标集合进行平面拟合处理得到光平面参数;
12、利用所述光平面参数进行优化处理得到图像采集相机参数完成初始标定。
13、进一步的,利用所述光平面参数进行优化处理得到图像采集相机参数完成初始标定包括:
14、f=||d-di(a,ap1,bp1,cp1,dp1,ap2,bp2,cp2,dp2)||2
15、其中,f为图像采集相机参数,d为标准环规的直径值,di为模型更新解算后环规的直径值,a为图像采集相机内参,ap1、bp1、cp1、dp1为测量小口径区域光平面参数,ap2、bp2、cp2、dp2为测量大口径区域光平面参数。
16、优选的,根据所述图像采集相机获取待测量电机定子图像包括:
17、利用激光器发射环形结构光至待测量电机定子的内壁表面后,利用所述图像采集相机获取待测量电机定子的光条图像作为待测量电机定子图像。
18、进一步的,利用所述待测量电机定子图像得到电机定子同轴度测量结果包括:
19、利用所述光条图像基于灰度重心法得到光条图像的光条中心线对应坐标;
20、根据所述光条中心线对应坐标利用图像采集相机参数计算图像采集相机坐标系的光条中心线三维坐标与世界坐标系的光条中心线三维坐标;
21、利用所述世界坐标系的光条中心线三维坐标建立世界坐标系的光条中心线三维坐标集;
22、利用所述世界坐标系的光条中心线三维坐标集进行点云分割得到世界坐标系的光条中心线三维坐标分割结果;
23、利用所述世界坐标系的光条中心线三维坐标分割结果得到电机定子同轴度测量结果。
24、进一步的,根据所述光条中心线对应坐标利用图像采集相机参数计算图像采集相机坐标系的光条中心线三维坐标与世界坐标系的光条中心线三维坐标的计算式如下:
25、pi=f(a,ap1,bp1,cp1,dp1,ap2,bp2,cp2,dp2)
26、pi'=pi+[0,0,zi]
27、其中,pi为图像采集相机坐标系的光条中心线三维坐标,pi’为世界坐标系的光条中心线三维坐标,a为图像采集相机内参,ap1、bp1、cp1、dp1为测量小口径区域光平面参数,ap2、bp2、cp2、dp2为测量大口径区域光平面参数。
28、进一步的,利用所述世界坐标系的光条中心线三维坐标集进行点云分割得到世界坐标系的光条中心线三维坐标分割结果的计算式如下:
29、
30、其中,q1为待测量电机定子小口径对应光条中心线三维坐标分割结果,q2为待测量电机定子大口径对应光条中心线三维坐标分割结果,zi为世界坐标系的光条中心线三维坐标的z轴坐标,ztherod为待测量电机定子对应z方向的大小圆区分阈值。
31、进一步的,利用所述世界坐标系的光条中心线三维坐标分割结果得到电机定子同轴度测量结果包括:
32、根据所述世界坐标系的光条中心线三维坐标分割结果进行圆柱拟合处理分别得到待测量电机定子大口径对应起始点与待测量电机定子小口径对应起始点;
33、利用所述待测量电机定子大口径对应起始点与待测量电机定子小口径对应起始点分别进行空间直线拟合后,分别获取各点至公共轴线距离作为初始距离;
34、利用所述初始距离中最大值的两倍作为电机定子同轴度测量结果。
35、一种电机定子同轴度测量装置,包括载物台、龙门结构、相机与激光器安装板、位移台、定位销、定子、激光器与相机;所述定子通过定位销固定于载物台上,所述激光器与相机通过相机与激光器安装板设置于位移台上,所述位移台通过龙门结构设置于载物台上。
36、优选的,所述定子与相机为同轴线,所述相机设置于激光器上方。
37、与最接近的现有技术相比,本发明具有的有益效果:
38、相比三坐标的测量方法,有较高测量效率,成本更低,自动化程度高,不需要人工干预,测量精度满足汽车行业对定子同轴度的测量需求。
技术特征:
1.一种电机定子同轴度测量方法,其特征在于,包括:
2.如权利要求1所述的一种电机定子同轴度测量方法,其特征在于,所述基于matlab对图像采集相机进行初始标定包括:
3.如权利要求2所述的一种电机定子同轴度测量方法,其特征在于,利用所述光平面参数进行优化处理得到图像采集相机参数完成初始标定包括:
4.如权利要求1所述的一种电机定子同轴度测量方法,其特征在于,根据所述图像采集相机获取待测量电机定子图像包括:
5.如权利要求4所述的一种电机定子同轴度测量方法,其特征在于,利用所述待测量电机定子图像得到电机定子同轴度测量结果包括:
6.如权利要求5所述的一种电机定子同轴度测量方法,其特征在于,根据所述光条中心线对应坐标利用图像采集相机参数计算图像采集相机坐标系的光条中心线三维坐标与世界坐标系的光条中心线三维坐标的计算式如下:
7.如权利要求5所述的一种电机定子同轴度测量方法,其特征在于,利用所述世界坐标系的光条中心线三维坐标集进行点云分割得到世界坐标系的光条中心线三维坐标分割结果的计算式如下:
8.如权利要求7所述的一种电机定子同轴度测量方法,其特征在于,利用所述世界坐标系的光条中心线三维坐标分割结果得到电机定子同轴度测量结果包括:
9.一种基于上述权利要求1-8任一项所述的电机定子同轴度测量方法的装置,其特征在于,包括载物台(1)、龙门结构(2)、相机与激光器安装板(3)、位移台(4)、定位销(5)、定子(6)、激光器(7)与相机(8);所述定子(6)通过定位销(5)固定于载物台(1)上,所述激光器(7)与相机(8)通过相机与激光器安装板(3)设置于位移台(4)上,所述位移台(4)通过龙门结构(2)设置于载物台(1)上。
10.如权利要求9所述的一种电机定子(6)同轴度测量,其特征在于,所述定子(6)与相机(8)为同轴线,所述相机(8)设置于激光器(7)上方。
技术总结
本发明涉及电机定子同轴度测量领域,具体涉及一种电机定子同轴度测量方法及装置,所述一种电机定子同轴度测量方法包括:基于Matlab对图像采集相机进行初始标定;根据所述图像采集相机获取待测量电机定子图像;利用所述待测量电机定子图像得到电机定子同轴度测量结果,相比三坐标的测量方法,有较高测量效率,成本更低,自动化程度高,不需要人工干预,测量精度满足汽车行业对定子同轴度的测量需求。
技术研发人员:房长帅,张效栋,王倩雯,李正文,陈杨
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!