一种InSAR干涉图大气相位融合及校正方法与流程
本发明属于合成孔径雷达干涉测量技术(insar)领域,涉及一种insar干涉图大气相位融合及校正方法。
背景技术:
1、目前insar技术在滑坡、地震、火山、城市失水等引起的地面沉降监测方面得到了广泛的应用,但其监测精度受大气延迟影响较大,因此需对大气相位进行精确去除。目前常用的大气相位去除方法主要有多项式拟合、气象信息模型、gps数据和水汽数据校正等。大部分大气相位校正方法均是对大气相位进行模拟,然后再从整体相位中减去模拟的大气相位。然而在大多数情况下,使用一种方法并不能精确去除大气相位,如:多项式拟合方法简单,能够尽可能的保留形变相位,但是对于复杂的大气相位,该方法模拟的大气相位精度较低;bp神经网络虽然能够较好的模拟大气相位,但对于形变区域,其模拟的大气相位中往往包含了形变相位,从而无法达到去除大气相位同时保留形变相位的目的。因此,需要融合多种方法的优势来达到精确去除大气相位的目的。
技术实现思路
1、本发明的第一目的是提供一种insar干涉图大气相位融合方法。
2、为实现上述技术目的,本发明采用如下方案:
3、一种insar大气相位融合方法,包括:
4、对不同时期的两景遥感影像生成解缠干涉相位图;
5、对解缠干涉相位图中的形变区域使用二次多项式方法模拟大气相位,对非形变区域使用bp神经网络模拟大气相位,获得解缠干涉相位图的大气相位图;
6、取大气相位图中形变区域与非形变区域的形变边界上的像素点构成边界点集合,对集合中的每个边界点的上下若干个像元依次通过加权的方式进行大气相位融合,获得大气相位融合后的大气相位图。
7、本发明先使用二次多项式和bp神经网络模拟大气相位,对于形变区域使用二次多项式拟合的大气相位,非形变区域则使用bp神经网络模拟的大气相位,对于形变区与非形变区交界处,则通过加权法对两种大气相位进行融合,既解决了多项式方法无法完美拟合复杂大气相位的问题,又解决了bp神经网络形变区“过拟合”的问题。
8、作为一种优选的实施方式,所述解缠干涉相位图的大气相位图的获取方式为:对解缠干涉相位图中非形变区域的干涉相位使用二次多项式模拟整个解缠干涉相位图的大气相位,并提取形变区域的大气相位;使用bp神经网络模拟整个解缠干涉相位图的大气相位,并提取非形变区域的大气相位,叠加提取结果,获得解缠干涉相位图的大气相位图。如果使用二次多项式对整个干涉相位做模拟,会将形变区域的形变相位也当成大气相位,导致无法保留完整的形变相位,二次多项式使用非形变区域的相位来模拟大气相位,能够保留形变区域的形变相位。
9、作为一种优选的实施方式,对形变边界上的像素点,记录其在干涉图中对应的行列号,构建边界点矩阵,边界点矩阵中第一列为边界点的行号,第二列为边界点的列号;基于边界点矩阵提取边界点坐标数据,对边界点及其上下若干个像元依次进行融合处理。
10、作为一种优选的实施方式,对每个边界点的上下n个像元进行数据融合,n=5~15。
11、作为一种优选的实施方式,所述对每个边界点的上下若干个像元依次通过加权的方式进行大气相位融合包括:
12、对每个像元分别计算以该像元为中心,预设大小的窗口范围内,二次多项式模拟的大气相位、bp神经网络模拟的大气相位与原始解缠干涉相位的误差百分比的均值mploy、mbp;
13、如果该像元在形变区域内,则基于下式进行加权融合:
14、
15、如果该像元在非形变区域内,则基于下式进行加权融合:
16、
17、式中,phupb(x,y)为融合大气相位值,phuploy(x,y)为二次多项式模拟的大气相位,phubp(x,y)为bp神经网络模拟的大气相位,(x,y)为像元坐标。
18、作为一种优选的实施方式,所述误差百分比为二次多项式模拟的大气相位/bp神经网络模拟的大气相位与原始解缠干涉相位的差值与原始解缠干涉相位的比值的绝对值。
19、作为一种优选的实施方式,还包括,在计算误差百分比后,在窗口的误差百分比矩阵中剔除离群值,得到新的误差百分比矩阵,对新的误差百分比矩阵计算均值,用于加权融合。
20、进一步的,所述离群值为与均值的差值超过3倍标准差的值。
21、作为一种优选的实施方式,所述窗口的大小为20~40像元。
22、本发明的另一目的在于提供一种insar大气相位校正方法,利用上述大气相位融合方法获取大气相位融合后的大气相位图;
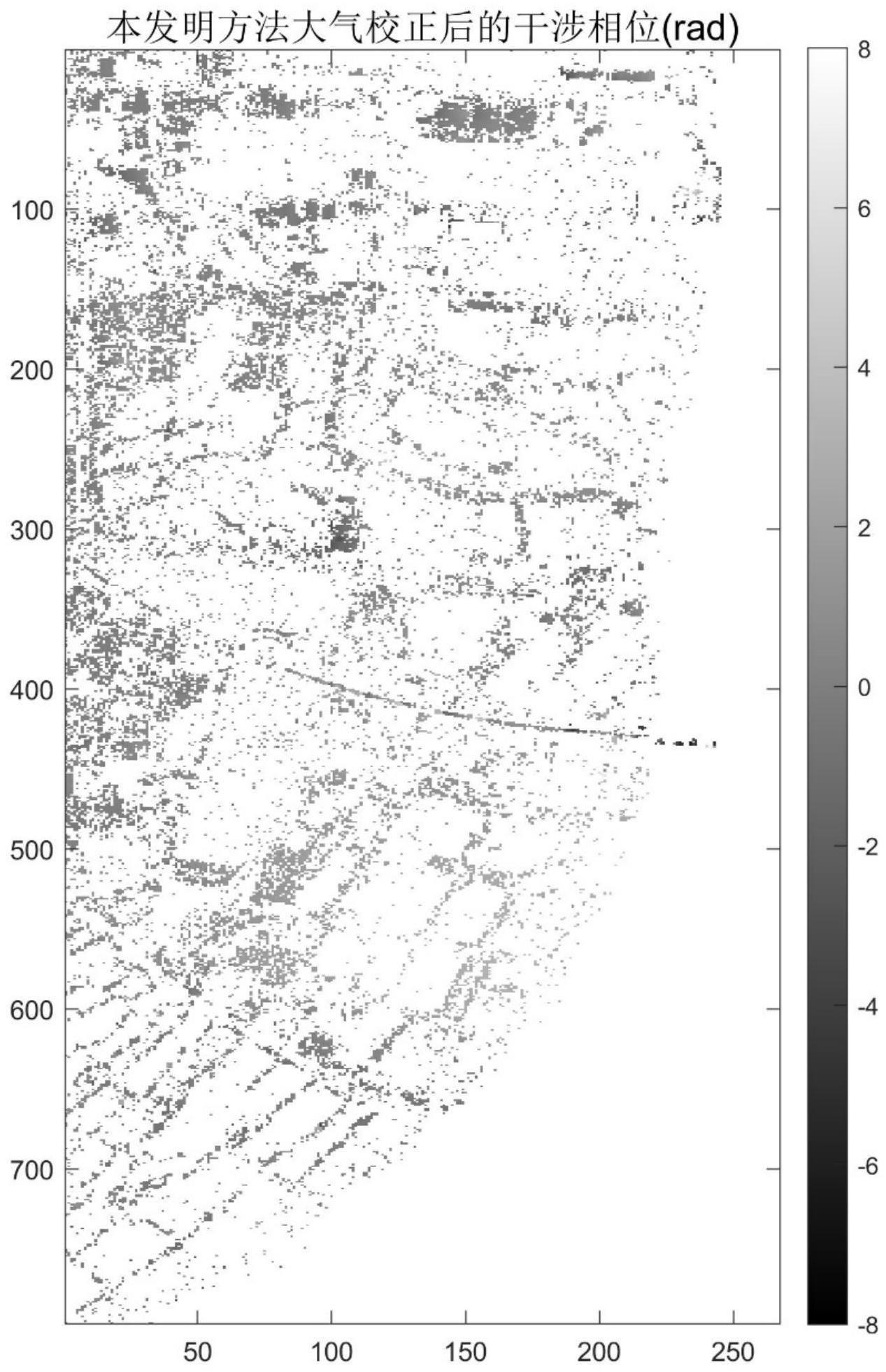
23、将整个解缠干涉相位图的干涉相位减去所述大气相位融合后的大气相位,获得校正后的干涉相位。
24、本发明充分利用二次多项式和bp神经网络两种大气相位校正方法的优势,将两种方法模拟的大气相位进行融合,在非形变区使用bp神经网络模拟的大气相位,在形变区使用二次多项式模拟的大气相位,在形变边界则使用移动窗口法对两种大气相位进行加权平均,既解决了多项式方法无法完美拟合复杂大气相位的问题,又解决了bp神经网络形变区“过拟合”的问题,也解决了融合相位在形变边界存在跳跃的问题,提高了insar大气相位校正的精度,从而进一步提高insar形变监测的精度。
技术特征:
1.一种insar干涉图大气相位融合方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述解缠干涉相位图的大气相位图的获取方式为:对解缠干涉相位图中非形变区域的干涉相位使用二次多项式模拟整个解缠干涉相位图的大气相位,并提取形变区域的大气相位;使用bp神经网络模拟整个解缠干涉相位图的大气相位,并提取非形变区域的大气相位,叠加提取结果,获得整个解缠干涉相位图的大气相位图。
3.根据权利要求1所述的方法,其特征在于,对形变边界上的像素点,记录其在干涉图中对应的行列号,构建边界点矩阵,边界点矩阵中第一列为边界点的行号,第二列为边界点的列号;基于边界点矩阵提取边界点坐标数据,对边界点及其上下若干个像元依次进行融合处理。
4.根据权利要求1所述的方法,其特征在于,对每个边界点的上下n个像元进行数据融合,n=5~15。
5.根据权利要求1所述的方法,其特征在于,所述对每个边界点的上下若干个像元依次通过加权的方式进行大气相位融合包括:
6.根据权利要求5所述的方法,其特征在于,所述误差百分比为二次多项式模拟的大气相位/bp神经网络模拟的大气相位与原始解缠干涉相位的差值与原始解缠干涉相位的比值的绝对值。
7.根据权利要求5所述的方法,其特征在于,还包括,在计算误差百分比后,在窗口的误差百分比矩阵中剔除离群值,得到新的误差百分比矩阵,对新的误差百分比矩阵计算均值,用于加权融合。
8.根据权利要求7所述的方法,其特征在于,所述离群值为与均值的差值超过3倍标准差的值。
9.根据权利要求5所述的方法,其特征在于,所述窗口的大小为20~40像元。
10.一种insar干涉图大气相位校正方法,其特征在于,包括,利用权利要求1~9任一项所述大气相位融合方法获取大气相位融合后的大气相位图;
技术总结
本发明涉及一种InSAR干涉图大气相位融合及校正方法,对不同时期的两景遥感影像生成解缠干涉相位图,对解缠干涉相位图中的形变区域使用二次多项式方法模拟大气相位,对非形变区域使用BP神经网络模拟大气相位,获得解缠干涉相位图的大气相位图;取大气相位图中构成形变区域与非形变区域的形变边界上的像素点构成边界点集合,对集合中的每个边界点上下若干个像元依次通过加权的方式进行大气相位融合,获得大气相位融合后的大气相位图,实现大气相位融合;之后将整个解缠干涉相位图的干涉相位减去大气相位融合后的大气相位,获得大气校正后的干涉相位。本发明的方法融合了两种方法并解决了形变边界的跳跃问题,进一步提高了InSAR形变监测的精度。
技术研发人员:王刘宇,王茂枚,赵钢,鞠海建,张子鹏,王明明,闵克祥,孙明月,徐毅,陈辉,陈颖,万思成
受保护的技术使用者:江苏省水利科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!