本发明涉及蓄电池定位,具体涉及一种电动车换电站的蓄电池自动定位追踪方法。
背景技术:
1、庞大的快递、外卖、跑腿市场,对于配送群体来说机会涌动,痛点也并生。对于这个高度依赖电动车出行的行业,续航里程、补能麻烦等焦虑问题普遍存在。
2、新国标电动车新规限制了车辆的总体重量(55kg)以及最高速度(25km/h),电动车最大重量受到限制的同时,也间接限制了电池容量,如此一来,电动车的续航里程将会变得比以前更短。配送人员跑单越多,电池电量消耗越快也越多,里程焦虑问题突出。
3、对于配送群体,采用“有线”方式对电动车进行充电会浪费大量时间,显然无法满足配送群体对于电动车快速充电的需求。在这种情况下,电动车换电站应运而生。然而,现有的电动车换电站不能对具有“共享”属性的蓄电池进行准确地定位追踪,从而无法对蓄电池进行有效管理,给电动车换电站的蓄电池管理工作带来了较大程度的不便。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种电动车换电站的蓄电池自动定位追踪方法,能够有效克服现有技术所存在的无法对蓄电池进行准确定位追踪的缺陷。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
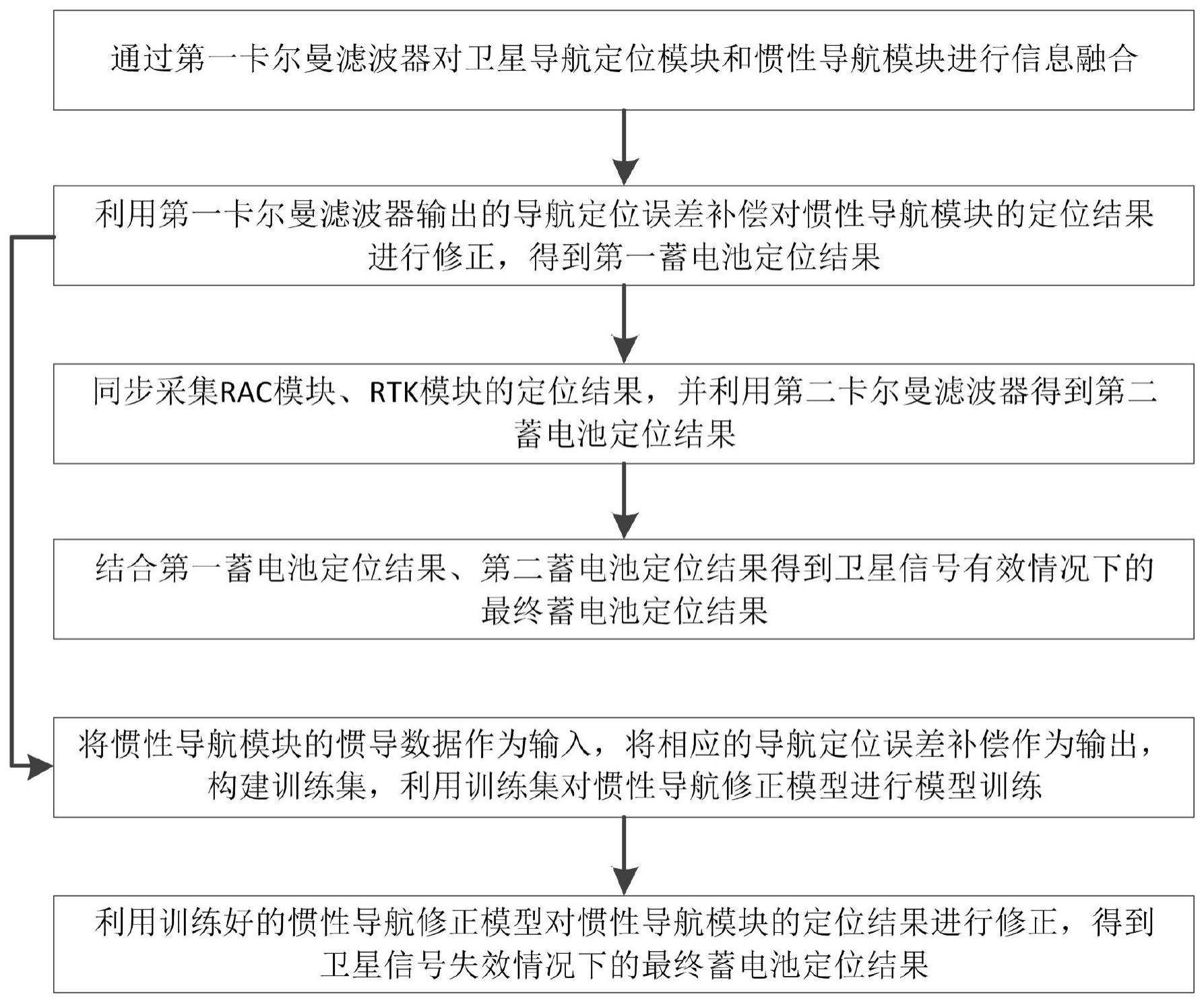
5、一种电动车换电站的蓄电池自动定位追踪方法,在卫星信号有效的情况下,通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,利用第一卡尔曼滤波器输出的导航定位误差补偿对惯性导航模块的定位结果进行修正,得到第一蓄电池定位结果,并将惯性导航模块的惯导数据作为输入,将相应的导航定位误差补偿作为输出,构建训练集,利用训练集对惯性导航修正模型进行模型训练;
6、同时,同步采集rac模块、rtk模块的定位结果,并利用第二卡尔曼滤波器得到第二蓄电池定位结果,结合第一蓄电池定位结果、第二蓄电池定位结果得到卫星信号有效情况下的最终蓄电池定位结果;
7、在卫星信号失效的情况下,利用训练好的惯性导航修正模型对惯性导航模块的定位结果进行修正,得到卫星信号失效情况下的最终蓄电池定位结果。
8、优选地,所述通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,包括:
9、对采集到的卫星定位数据、惯导定位数据分别进行解算,并采用强跟踪卡尔曼滤波算法对解算后的数据进行信息融合,得到导航定位误差补偿。
10、优选地,所述采用强跟踪卡尔曼滤波算法对解算后的数据进行信息融合,得到导航定位误差补偿,包括:
11、采用下式计算t-1时刻至t时刻的均方误差mset-1,t:
12、
13、其中,βt为t时刻的渐消因子,at-1,t为t-1时刻至t时刻的状态转移矩阵,mset-1为t-1时刻的均方误差,bt-1为t-1时刻的噪声矩阵,nt-1为t-1时刻的系统噪声。
14、优选地,所述同步采集rac模块、rtk模块的定位结果,并利用第二卡尔曼滤波器得到第二蓄电池定位结果,包括:
15、在rtk模块出现固定解的情况下,通过第二卡尔曼滤波器对rac模块、rtk模块的定位结果之间的误差数据进行估计,并利用第二卡尔曼滤波器输出的误差数据对rtk模块的定位结果进行修正,得到第二蓄电池定位结果;
16、在rtk模块出现浮点解的情况下,结合载体运动学方程递推得到先验位置信息,读取东向、北向位置误差数据,通过第二卡尔曼滤波器进行最优融合,得到第二蓄电池定位结果。
17、优选地,所述第二卡尔曼滤波器的系统状态χ采用下式表示:
18、χ=(l1 l2 δe δn)
19、其中,l1为经度、l2为纬度,δe为东向误差数据,δn为北向误差数据;
20、所述第二卡尔曼滤波器的系统状态方程包括:
21、
22、
23、
24、
25、其中,ve为东向速度,vn为北向速度,re为地球半径。
26、优选地,所述利用训练集对惯性导航修正模型进行模型训练,包括:
27、将训练集输入惯性导航修正模型中,基于连续的概率分布随机生成输入层的权重和隐含层的偏置,利用最小化平方差公式计算输出层的权重;
28、采用正交投影法更新隐含层的输出,将更新后的隐含层的输出和输出层的权重构成惯性导航修正模型的输出;
29、更新迭代隐含层的输出,直至惯性导航修正模型的输出与样本标签的最小化平方差最小时停止迭代,得到训练好的惯性导航修正模型。
30、优选地,所述惯性导航修正模型为基于elm神经网络构建的模型,所述惯性导航修正模型包括输入层、隐含层、输出层三层结构;
31、其中,输入层包含6个节点,分别代表三轴加速度信息、三轴角速度信息;输出层包含6个节点,分别代表三轴速度误差值、三轴位置误差值。
32、优选地,所述惯性导航修正模型的激活函数采用下式表示:
33、
34、其中,afi(x)为隐含层中第i个节点的激活函数,m为隐含层中的节点数量。
35、优选地,所述在卫星信号失效的情况下,利用训练好的惯性导航修正模型对惯性导航模块的定位结果进行修正,得到卫星信号失效情况下的最终蓄电池定位结果,包括:
36、采集卫星信号失效时间段内惯性导航模块的惯导数据,并输入训练好的惯性导航修正模型,得到模拟采用强跟踪卡尔曼滤波算法后获取的导航定位误差补偿;
37、将导航定位误差补偿反馈至惯性导航模块,惯性导航模块对定位结果进行修正,得到卫星信号失效情况下的最终蓄电池定位结果。
38、(三)有益效果
39、与现有技术相比,本发明所提供的一种电动车换电站的蓄电池自动定位追踪方法,具有以下有益效果:
40、1)在卫星信号有效的情况下,通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,利用第一卡尔曼滤波器输出的导航定位误差补偿对惯性导航模块的定位结果进行修正,得到第一蓄电池定位结果,同时同步采集rac模块、rtk模块的定位结果,并利用第二卡尔曼滤波器得到第二蓄电池定位结果,结合第一蓄电池定位结果、第二蓄电池定位结果得到卫星信号有效情况下的最终蓄电池定位结果,从而能够在卫星信号有效时,实现对蓄电池的准确定位追踪;
41、2)在卫星信号有效的情况下,将惯性导航模块的惯导数据作为输入,将相应的导航定位误差补偿作为输出,构建训练集,利用训练集对惯性导航修正模型进行模型训练;在卫星信号失效的情况下,利用训练好的惯性导航修正模型对惯性导航模块的定位结果进行修正,得到卫星信号失效情况下的最终蓄电池定位结果,从而能够在卫星信号失效时,实现对蓄电池的准确定位追踪,便于电动车换电站对具有“共享”属性的蓄电池进行有效管理。
技术特征:1.一种电动车换电站的蓄电池自动定位追踪方法,其特征在于:在卫星信号有效的情况下,通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,利用第一卡尔曼滤波器输出的导航定位误差补偿对惯性导航模块的定位结果进行修正,得到第一蓄电池定位结果,并将惯性导航模块的惯导数据作为输入,将相应的导航定位误差补偿作为输出,构建训练集,利用训练集对惯性导航修正模型进行模型训练;
2.根据权利要求1所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,包括:
3.根据权利要求2所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述采用强跟踪卡尔曼滤波算法对解算后的数据进行信息融合,得到导航定位误差补偿,包括:
4.根据权利要求2所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述同步采集rac模块、rtk模块的定位结果,并利用第二卡尔曼滤波器得到第二蓄电池定位结果,包括:
5.根据权利要求4所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述第二卡尔曼滤波器的系统状态χ采用下式表示:
6.根据权利要求2所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述利用训练集对惯性导航修正模型进行模型训练,包括:
7.根据权利要求6所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述惯性导航修正模型为基于elm神经网络构建的模型,所述惯性导航修正模型包括输入层、隐含层、输出层三层结构;
8.根据权利要求7所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述惯性导航修正模型的激活函数采用下式表示:
9.根据权利要求6所述的电动车换电站的蓄电池自动定位追踪方法,其特征在于:所述在卫星信号失效的情况下,利用训练好的惯性导航修正模型对惯性导航模块的定位结果进行修正,得到卫星信号失效情况下的最终蓄电池定位结果,包括:
技术总结本发明涉及蓄电池定位,具体涉及一种电动车换电站的蓄电池自动定位追踪方法,在卫星信号有效的情况下,通过第一卡尔曼滤波器对卫星导航定位模块和惯性导航模块进行信息融合,利用第一卡尔曼滤波器输出的导航定位误差补偿对惯性导航模块的定位结果进行修正,得到第一蓄电池定位结果,并将惯性导航模块的惯导数据作为输入,将相应的导航定位误差补偿作为输出,构建训练集,利用训练集对惯性导航修正模型进行模型训练;同时,同步采集RAC模块、RTK模块的定位结果,并利用第二卡尔曼滤波器得到第二蓄电池定位结果;本发明提供的技术方案能够有效克服现有技术所存在的无法对蓄电池进行准确定位追踪的缺陷。
技术研发人员:吴鹏,钟灿,崔中强
受保护的技术使用者:合肥国盛电池科技有限公司
技术研发日:技术公布日:2024/1/15