一种基于深度学习道路环境感知的路径规划方法
本发明属于路径规划领域,涉及一种基于深度学习道路环境感知的路径规划方法。
背景技术:
1、路径规划是一种在空间中寻找从起点到目标点的最优或合适路径的过程。路径规划在自动驾驶、无人系统、智能交通系统、机器人导航、物流规划等领域应用广泛,而实时路径规划通过智能、高效的实时规划方式,使得上述领域运作更加安全、高效和灵活,是所有这些领域中实现智能决策和导航的核心技术之一。
2、在路径规划中,通常会有一个地图或环境模型,其中包含了障碍物、道路、路径网络或其他可行驶的区域信息,路径规划算法的目标是基于这个地图和特定的约束条件,找到一条从起点到目标点的路径,使得该路径在某种意义上是最优的或者最适合当前任务的,具体取决于实际应用需求。
3、传统路径规划算法通常基于启发式搜索、图搜索、a*算法等,它们依赖于预定义的规则和信息。虽然,传统路径规划算法总体上具备简单、可解释性强、低计算成本、易于实现部署、可控性好等方面优势,但是在复杂的实际场景中,这些算法往往难以应对高度动态的实际复杂场景,存在诸如灵活性差、难以处理高维空间、动态环境适应性差、对障碍物处理不充分等不足。
4、随着人工智能的发展,基于人工智能的路径规划,特别是深度学习技术的路径规划应用,成为一种新的趋势,这种方法可以通过学习大量真实场景数据,自动提取特征和状态信息,具有适应复杂环境、实时性高、全局最优解、灵活性和自适应性等优势,适用于灵活地应对复杂的路径规划问题。
5、总体来说,将传统路径规划算法和基于人工智能的路径规划算法结合起来,通过发挥各自的优势并弥补彼此的不足,综合考虑环境的复杂性和预知规则,从而提高路径规划的效率、准确性和适应性,这种综合方法在自动驾驶、智能交通系统、无人机、机器人和物流等领域中有着广阔的应用前景,并有望持续发展和优化;然而,如何将传统路径规划算法和基于人工智能的路径规划算法进行有效结合是亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于深度学习道路环境感知的路径规划方法。
2、为达到上述目的,本发明提供如下技术方案:
3、一种基于深度学习道路环境感知的路径规划方法,该方法包括以下步骤:
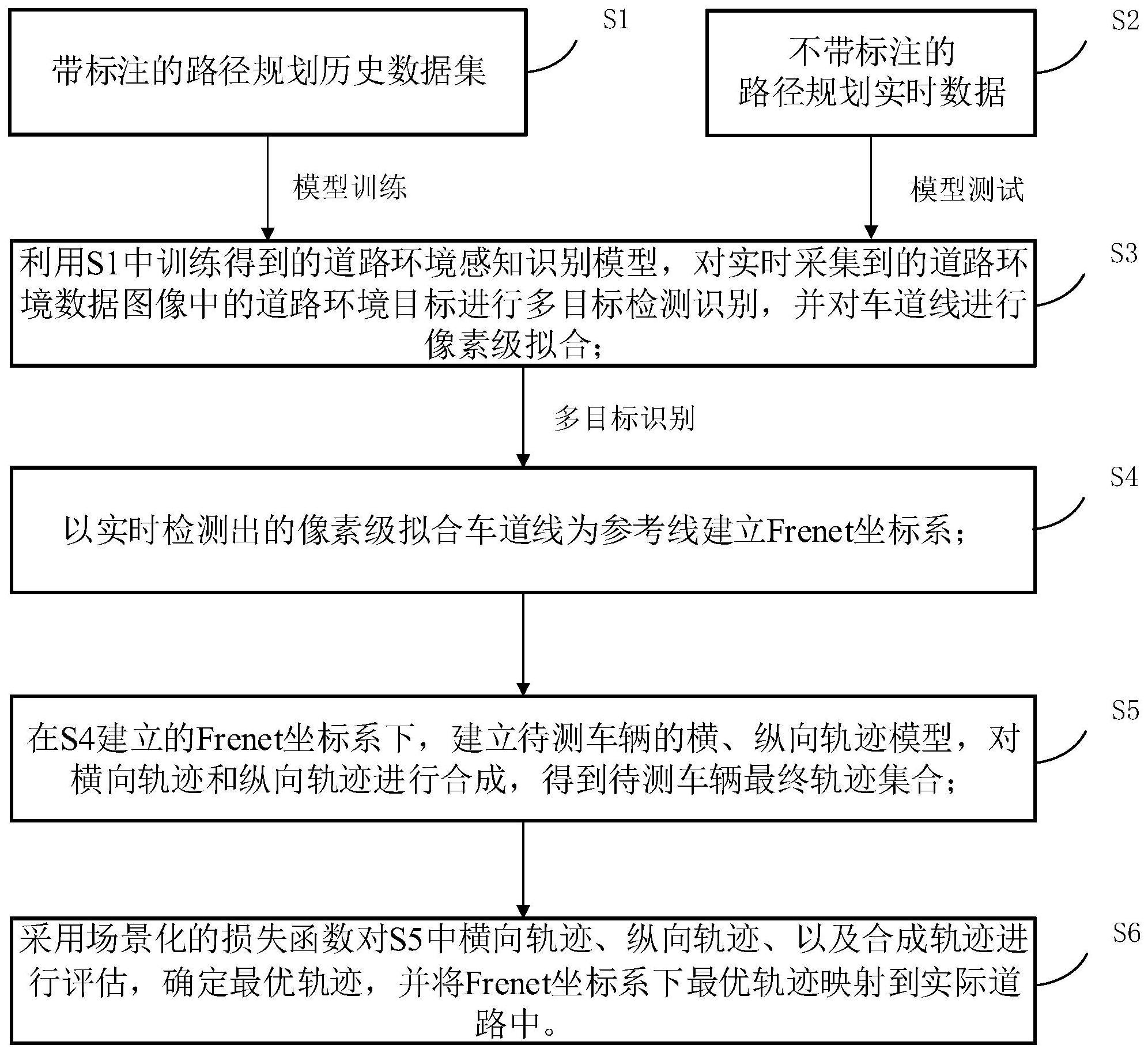
4、s1:构建深度神经网络的道路环境感知识别模型,利用带标注的路径规划历史数据集对道路环境感知识别模型进行训练;
5、s2:实时监测车辆运行过程中的环境信息,利用图像传感器获取车辆运行过程中的道路环境数据图像,所述道路环境数据图像为车辆行驶方向及其道路两侧图像;
6、s3:利用s1中训练得到的道路环境感知识别模型,对实时采集到的道路环境数据图像中的道路环境目标进行多目标检测识别,并对车道线进行像素级拟合;
7、s4:以实时检测出的像素级拟合车道线为参考线建立frenet坐标系;
8、s5:在s4建立的frenet坐标系下,建立待测车辆的横、纵向轨迹模型,对横向轨迹和纵向轨迹进行合成,得到待测车辆最终轨迹集合;
9、s6:采用场景化的损失函数对s5中横向轨迹、纵向轨迹、以及合成轨迹进行评估,确定最优轨迹,并将frenet坐标系下最优轨迹映射到实际道路中。
10、本发明的有益效果在于:
11、本发明所提出的路径规划方法有效避免了传统启发式方法效率低、规划路径不优、难以应对复杂场景等缺点。本方法可以快速地学习和适应环境的变化,能够实现端到端的学习。并通过对大量真实场景数据进行学习,能够提高路径规划的准确性和实用性。除此之外,基于深度学习的算法能够自动提取特征和状态信息,对于大规模数据处理具有优势,可实现较低的计算成本。
12、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种基于深度学习道路环境感知的路径规划方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s1的深度神经网络的道路环境感知识别模型包括采用基础卷积网络提取道路环境数据图像的特征;采用额外卷积层提取不同尺度的特征;采用预测卷积层生成不同道路环境目标的边界框的位置和类别预测,输出一系列的预测框,每个预测框包含一个道路环境目标的类别标签、位置和置信度。
3.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s1的深度神经网络的道路环境感知识别模型的训练过程包括:
4.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s3具体包括:
5.根据权利要求4所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:步骤s33具体包括:
6.根据权利要求5所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s33还包括步骤s330,所述步骤s330具体包括:
7.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s4具体包括:对于基于实时检测的像素级拟合车道线为参考线的frenet坐标系,由s坐标和d坐标组成,s坐标表示沿着路径的累积距离,d坐标表示车辆在道路的横向偏离;frenet坐标系的原点是车辆的当前位置,s轴沿着路径方向,d轴垂直于路径;利用frenet坐标系确定车辆在车道中的位置。
8.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s5具体包括:
9.根据权利要求1所述的一种基于深度学习道路环境感知的路径规划方法,其特征在于:所述步骤s6具体为:
技术总结
本发明属于路径规划技术领域,涉及一种基于深度学习道路环境感知的路径规划方法;该方法包括使用Frenet坐标系来描述车辆的运动状态,将路径规划问题转化为一种最优化问题,利用SSD模型实时检测道路车道线以及障碍物等,将车道线视为Frenet坐标系下的参考线,通过多项式拟合生成备选轨迹集合,再通过损失函数找到横、纵向轨迹并最终合成优化路径。本发明在常规Frenet坐标系下基于人工智能开展实时路径规划,有效避免了传统路径优化算法灵活性差、动态环境适应性差、对障碍物处理不充分等不足,发挥了深度网络对车道线、障碍物、指示标志等的良好识别能力,能够在复杂动态环境下生成高质量的路径规划方案。
技术研发人员:张焱,杨珂珍,张露月,陈俊华,韩延,黄庆卿
受保护的技术使用者:重庆邮电大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!