线激光轮廓仪系统的标定方法、装置和电子设备与流程
本公开涉及传感器标定领域,尤其涉及一种线激光轮廓仪系统的标定方法、装置和电子设备。
背景技术:
1、在物体的量测场景中,线激光轮廓仪或待测物体在一个运动轴的带动下移动。在移动过程中,线激光轮廓仪通过激光器向物体表面投射激光线,然后通过光传感器记录轮廓面反射的亮度信息,然后利用计算机计算出物体的几何尺寸。
2、但是,当运动轴和激光平面不垂直时,会导致物体的几何尺寸存在测量误差,亟需一种标定方法来矫正这种误差。
技术实现思路
1、本公开的多个方面提供一种线激光轮廓仪系统的标定方法、装置和电子设备,以标定线激光轮廓仪系统,进而矫正采用线激光轮廓仪对物体尺寸的测量误差。
2、本公开实施例第一方面提供一种线激光轮廓仪系统的标定方法,线激光轮廓仪系统包括:线激光轮廓仪和运动轴,其中,运动轴带动线激光轮廓仪或标定球移动,标定方法包括:
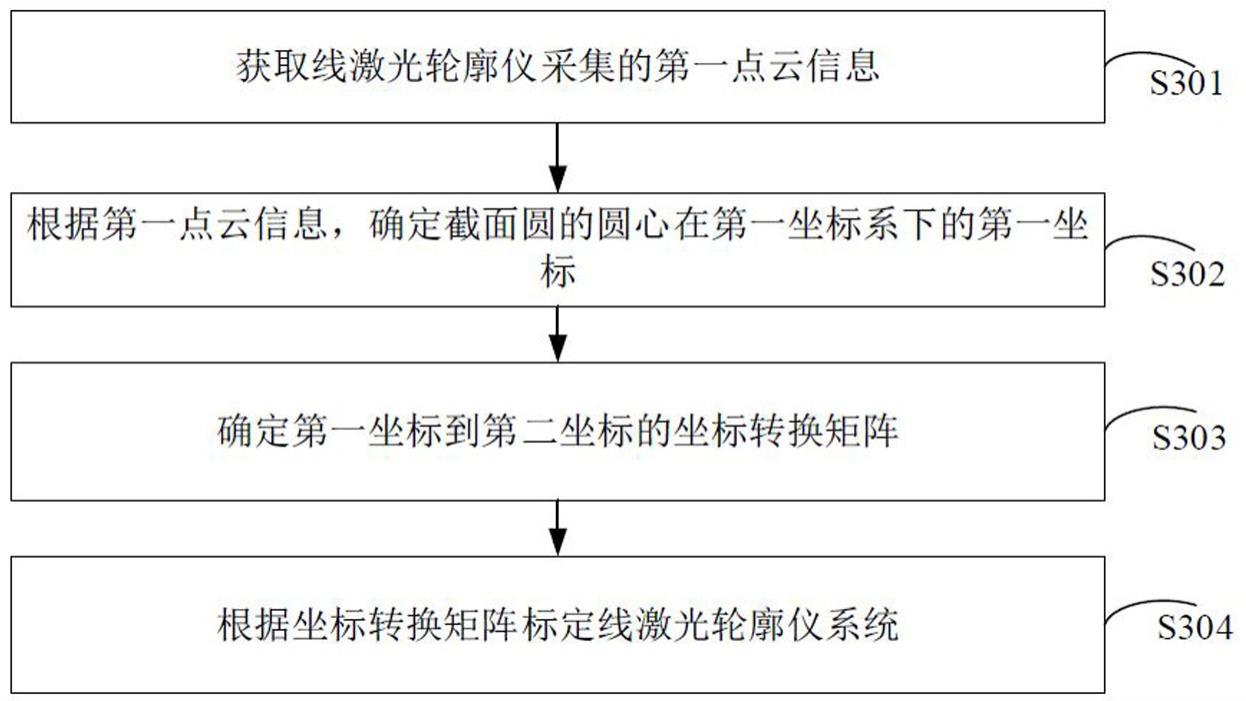
3、获取线激光轮廓仪采集的第一点云信息,第一点云信息包括:标定球的多个截面圆的圆周在第一坐标系下的三维坐标,第一坐标系为线激光轮廓仪系统的坐标系;
4、根据第一点云信息,确定截面圆的圆心在第一坐标系下的第一坐标;
5、确定第一坐标到第二坐标的坐标转换矩阵,第二坐标为截面圆的圆心在第二坐标系下的三维坐标,第二坐标系为线激光轮廓仪的坐标系;根据坐标转换矩阵标定线激光轮廓仪系统。
6、本公开实施例第二方面提供一种线激光轮廓仪系统的标定装置,线激光轮廓仪系统包括:线激光轮廓仪和运动轴,其中,运动轴带动线激光轮廓仪或标定球移动,标定装置包括:
7、获取模块,用于获取线激光轮廓仪采集的第一点云信息,第一点云信息包括:标定球的多个截面圆的圆周在第一坐标系下的三维坐标,第一坐标系为线激光轮廓仪系统的坐标系;
8、第一确定模块,用于根据第一点云信息,确定截面圆的圆心在第一坐标系下的第一坐标;
9、第二确定模块,用于确定第一坐标到第二坐标的坐标转换矩阵,第二坐标为截面圆的圆心在第二坐标系下的三维坐标,第二坐标系为线激光轮廓仪的坐标系;
10、标定模块,用于根据坐标转换矩阵标定线激光轮廓仪系统。
11、本公开实施例第三方面提供一种电子设备,包括:处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现第一方面的标定方法。
12、本公开实施例第四方面提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现第一方面的标定方法。
13、本公开实施例第五方面提供了一种计算机程序产品,程序产品包括:计算机程序,计算机程序存储在可读存储介质中,电子设备的至少一个处理器可以从可读存储介质读取计算机程序,至少一个处理器执行计算机程序使得电子设备执行第一方面的标定方法。
14、本公开提供一种线激光轮廓仪系统的标定方法,线激光轮廓仪系统包括:线激光轮廓仪和运动轴,其中,运动轴带动线激光轮廓仪或标定球移动,本公开通过获取线激光轮廓仪采集的第一点云信息,第一点云信息包括:标定球的多个截面圆的圆周在第一坐标系下的三维坐标,第一坐标系为线激光轮廓仪系统的坐标系;根据第一点云信息,确定截面圆的圆心在第一坐标系下的第一坐标;确定第一坐标到第二坐标的坐标转换矩阵,第二坐标为截面圆的圆心在第二坐标系下的三维坐标,第二坐标系为线激光轮廓仪的坐标系;根据坐标转换矩阵标定线激光轮廓仪系统,实现线激光轮廓仪系统的标定。
技术特征:
1.一种线激光轮廓仪系统的标定方法,其特征在于,所述线激光轮廓仪系统包括:线激光轮廓仪和运动轴,其中,所述运动轴带动所述线激光轮廓仪或标定球移动,所述标定方法包括:
2.根据权利要求1所述的线激光轮廓仪系统的标定方法,其特征在于,所述第一坐标系的横轴与竖轴用于表示线激光轮廓仪发射的激光面,第一坐标系的第一纵轴表示所述运动轴的移动方向,所述第二坐标系的横轴与所述第一坐标系的横轴相同,所述第二坐标系的竖轴与所述第一坐标系的竖轴相同,所述第二坐标系的第二纵轴垂直所述线激光轮廓仪的激光面;所述确定第一坐标到第二坐标的坐标转换矩阵,包括:
3.根据权利要求2所述的线激光轮廓仪系统的标定方法,其特征在于,所述根据所述第一中间方程,确定所述和所述的值,包括:
4.根据权利要求2所述的线激光轮廓仪系统的标定方法,其特征在于,所述根据所述第一中间方程,确定所述和所述的值,包括:
5.根据权利要求2至4任一项所述的线激光轮廓仪系统的标定方法,其特征在于,所述根据所述坐标转换矩阵标定所述线激光轮廓仪系统,包括:
6.根据权利要求5所述的线激光轮廓仪系统的标定方法,其特征在于,若所述标定球的实际半径已知,所述根据所述第一椭圆半轴和第二椭圆半轴,确定所述线激光轮廓仪的缩放矩阵,包括:
7.根据权利要求5所述的线激光轮廓仪系统的标定方法,其特征在于,若所述标定球的实际半径未知,所述根据所述第一椭圆半轴和第二椭圆半轴,确定所述线激光轮廓仪系统的缩放系数,包括:
8.根据权利要求5所述的线激光轮廓仪系统的标定方法,其特征在于,所述标定球的数量大于1时,每个标定球对应得到一个坐标转换矩阵和一个缩放矩阵,所述根据所述缩放矩阵和所述坐标转换矩阵标定所述线激光轮廓仪系统,包括:
9.根据权利要求8所述的线激光轮廓仪系统的标定方法,其特征在于,所述标定球的数量大于或等于2时,所述根据所述初始缩放矩阵和所述初始坐标转换矩阵标定所述线激光轮廓仪系统,包括:
10.根据权利要求9所述的线激光轮廓仪系统的标定方法,其特征在于,所述标定球的数量为2时,所述预设代价函数为:;
11.根据权利要求9所述的线激光轮廓仪系统的标定方法,其特征在于,若球的数量大于或等于3时,所述预设代价函数为:;其中,表示第个标定球的第个球面点在所述第一坐标系下的三维坐标,其中,,为正整数,,为正整数;为第个标定球的球心在标定球坐标系下的三维坐标,所述为所述第个标定球的实际半径;表示所述初始坐标转换矩阵,表示所述初始缩放矩阵,表示所述第二坐标系到标定球坐标系的旋转矩阵,表示所述第二坐标系到标定球坐标系的平移矩阵。
12.一种线激光轮廓仪系统的标定装置,其特征在于,所述线激光轮廓仪系统包括:线激光轮廓仪和运动轴,其中,所述运动轴带动所述线激光轮廓仪或标定球移动,所述标定装置包括:
13.一种电子设备,其特征在于,包括:处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如权利要求1至11任一项所述的标定方法。
14.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现权利要求1至11任一项所述的标定方法。
技术总结
本公开提供一种线激光轮廓仪系统的标定方法、装置和电子设备,该方法包括:获取线激光轮廓仪采集的第一点云信息,第一点云信息包括:标定球的多个截面圆的圆周在第一坐标系下的三维坐标,第一坐标系为线激光轮廓仪系统的坐标系;根据第一点云信息,确定截面圆的圆心在第一坐标系下的第一坐标;确定第一坐标到第二坐标的坐标转换矩阵,第二坐标为截面圆的圆心在第二坐标系下的三维坐标,第二坐标系为线激光轮廓仪的坐标系;根据坐标转换矩阵标定线激光轮廓仪系统,本公开能够实现线激光轮廓仪系统的标定。
技术研发人员:杨军,丁有爽,邵天兰
受保护的技术使用者:梅卡曼德(北京)机器人科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!