用于盾构管片拼装机的滑轨式管片位姿测量装置的制作方法
本发明涉及隧道施工,具体涉及一种用于盾构管片拼装机的滑轨式管片位姿测量装置。
背景技术:
1、在盾构法隧道施工中,管片是由盾构机中的拼装机来完成拼装。管片是隧道法盾构施工中永久衬砌结构,其装配的精度直接或者间接影响到隧道的整体质量。并且,管片作为主要支撑结构,其防水性能及结构受力后的耐久性能影响到隧道整体寿命。现在大部分的隧道施工中都是人工参与拼装管片,效率低、有安全隐患。另一方面,随着隧道直径的增加,上述劣势也随之显现。
技术实现思路
1、为克服现有技术所存在的缺陷,现提供一种用于盾构管片拼装机的滑轨式管片位姿测量装置,以解决现有的隧道施工一般采用人工参与拼装管片,效率低、有安全隐患的问题。
2、为实现上述目的,提供一种用于盾构管片拼装机的滑轨式管片位姿测量装置,包括:
3、导轨,固设于管片拼装机的抓取头,所述导轨沿所述抓取头上抓取的待拼装管片的外沿设置;
4、电动移动底座,滑设于所述导轨,所述电动移动底座安装有用于采集所述电动移动底座在所述导轨上的位置信息的第一传感器;
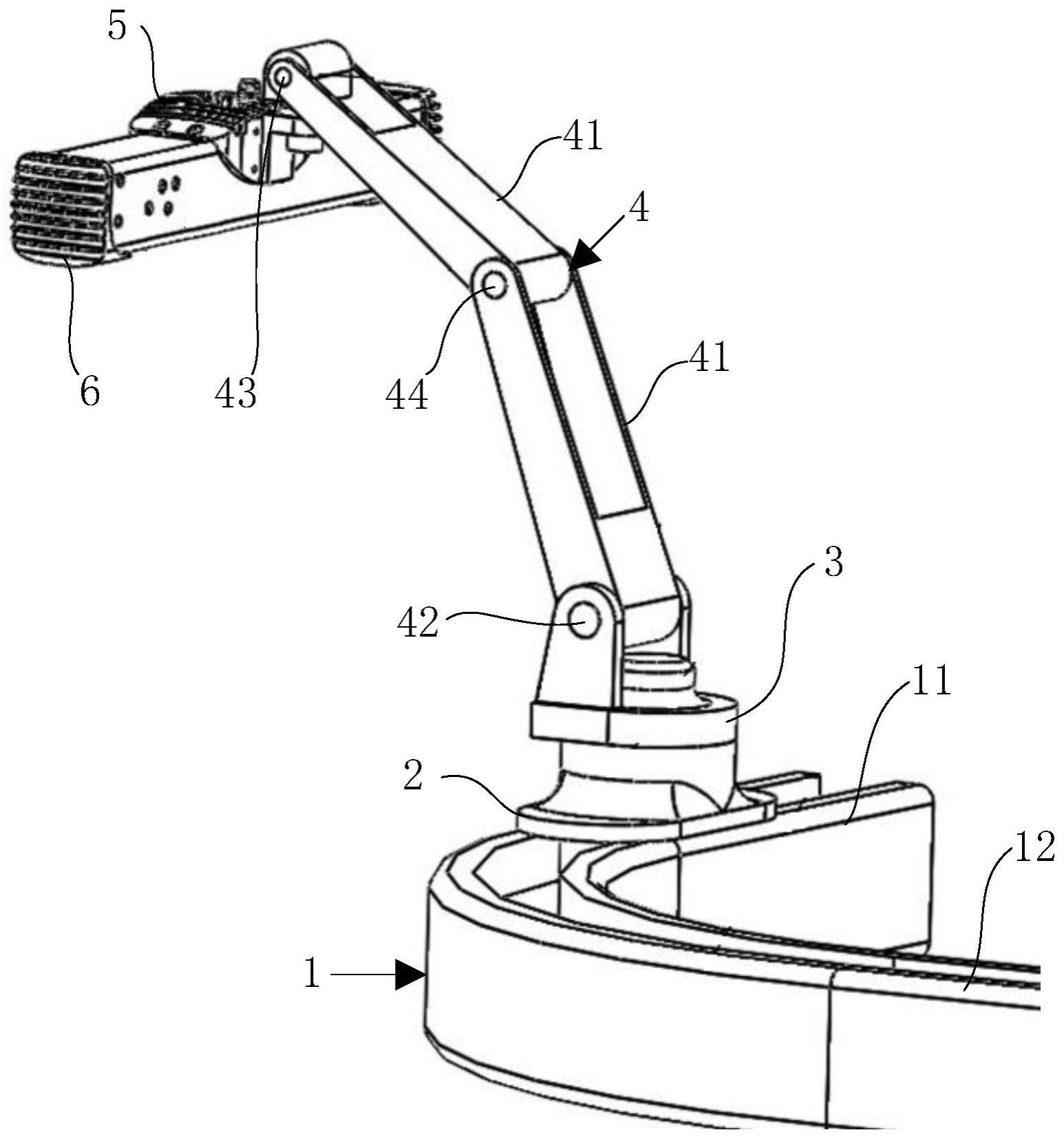
5、承台,通过第一回转支承可转动地安装于所述电动移动底座,所述电动移动底座安装有用于驱动所述承台的第一驱动件,所述第一回转支承安装有用于采集所述承台的转动角度的第二传感器;
6、电动吊臂,通过第一铰接轴可翻转地安装于所述承台,所述第一铰接轴安装有用于采集所述电动吊臂的翻转角度的第三传感器;
7、基座,通过第二铰接轴可翻转地安装于所述电动吊臂的远离所述承台的一端,所述第二铰接轴安装有用于采集所述基座的翻转角度的第四传感器;
8、用于采集所述待拼装管片的外沿的深度图像的视觉传感器,所述视觉传感器通过第二回转支承可转动地安装于所述基座,所述基座安装有用于驱动所述视觉传感器的第二驱动件,所述第二回转支承安装有用于采集所述视觉传感器的转动角度的第五传感器;
9、控制器,包括控制模块和计算模块,所述控制模块连接于所述电动移动底座、所述第一驱动件、所述电动吊臂、所述基座、所述视觉传感器、第一传感器、所述第二传感器、所述第三传感器、所述第四传感器和所述第五传感器,所述计算模块连接于所述控制模块,所述计算模块基于所述电动移动底座的位置信息、所述承台的转动角度、所述电动吊臂的翻转角度、所述基座的翻转角度、所述视觉传感器的转动角度以及所述深度图像计算获得所述待拼装管片的相对于所述抓取头的位置和姿态。
10、进一步的,第一传感器为行程传感器。
11、进一步的,所述第二传感器、所述第三传感器、所述第四传感器和所述第五传感器为角度传感器。
12、进一步的,所述导轨包括两悬挑段和连接段,两所述悬挑段相对设置,两所述悬挑段的一端连接于所述抓取头的一侧,所述连接段连接于两所述悬挑段的另一端。
13、进一步的,所述悬挑段和所述连接段分别开设有滑槽,所述连接段的滑槽的两端分别连通于两所述悬挑段的滑槽。
14、进一步的,所述电动吊臂包括两铰接臂,两所述铰接臂的一端通过第三铰接轴铰接在一起,所述第三铰接轴与所述第一铰接轴、所述第二铰接轴同向设置,一铰接臂的另一端安装于所述第一铰接轴,另一铰接臂的另一端安装于所述第三铰接轴,所述一铰接臂安装有用于驱动所述另一铰接臂的第三驱动件,所述控制模块连接于所述第三驱动件。
15、本发明的有益效果在于,本发明的用于盾构管片拼装机的滑轨式管片位姿测量装置,通过导轨安装于拼装机的抓取头上,使深度视觉传感器可识别范围沿导轨的长度方向移动并拍摄待拼装管片,通过移动的视觉传感器可以获取在各个角度下,待拼装管片的多个形状特征点的位置信息,控制器的计算模块根据已标定的视觉传感器和位置关系信息求出待拼装管片相对于拼装机的位置和姿态,实现了系统识别待拼装管片的位置辅助管片安装,既提高了管片安装效率,又提高了管片安装质量,还降低了人工安装存在的安全隐患。
技术特征:
1.一种用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,包括:
2.根据权利要求1所述的用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,第一传感器为行程传感器。
3.根据权利要求1所述的用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,所述第二传感器、所述第三传感器、所述第四传感器和所述第五传感器为角度传感器。
4.根据权利要求1所述的用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,所述导轨包括两悬挑段和连接段,两所述悬挑段相对设置,两所述悬挑段的一端连接于所述抓取头的一侧,所述连接段连接于两所述悬挑段的另一端。
5.根据权利要求4所述的用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,所述悬挑段和所述连接段分别开设有滑槽,所述连接段的滑槽的两端分别连通于两所述悬挑段的滑槽。
6.根据权利要求1所述的用于盾构管片拼装机的滑轨式管片位姿测量装置,其特征在于,所述电动吊臂包括两铰接臂,两所述铰接臂的一端通过第三铰接轴铰接在一起,所述第三铰接轴与所述第一铰接轴、所述第二铰接轴同向设置,一铰接臂的另一端安装于所述第一铰接轴,另一铰接臂的另一端安装于所述第三铰接轴,所述一铰接臂安装有用于驱动所述另一铰接臂的第三驱动件,所述控制模块连接于所述第三驱动件。
技术总结
本发明公开了一种用于盾构管片拼装机的滑轨式管片位姿测量装置,通过导轨安装于拼装机的抓取头上,使深度视觉传感器可识别范围沿导轨的长度方向移动并拍摄待拼装管片,通过移动的视觉传感器可以获取在各个角度下,待拼装管片的多个形状特征点的位置信息,控制器的计算模块根据已标定的视觉传感器和位置关系信息求出待拼装管片相对于拼装机的位置和姿态,实现了系统识别待拼装管片的位置辅助管片安装,既提高了管片安装效率,又提高了管片安装质量,还降低了人工安装存在的安全隐患。本发明解决了现有的隧道施工一般采用人工参与拼装管片,效率低、有安全隐患的问题。
技术研发人员:袁玮皓,彭世宝,庄欠伟,杨正,顾旭莹,曾语,李新宇,高阳,陈鼎,张雅澜,颜洪宇,范杰,马志刚,张闵庆,黄德中
受保护的技术使用者:上海隧道工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!