一种农业污染地巡检机器人的制作方法
本发明属于取样机器人,涉及一种农业污染地巡检机器人。
背景技术:
1、目前,土壤污染造成有害物质在农作物中积累,并通过食物链进入人体,引发各种疾病。对农业污染地的采样是治理农业污染地的首要条件。在对污染地的土壤进行采样时,为了全面准确的掌握污染情况,常常是需要对多处进行样品收集,并且需要对不同地方采集到的样品进行独立储存。一般多地点取样的话,需要人工带着取样设备到多处进行采样。当农业污染地地形复杂、崎岖不平时,人需要携带取样设备以及采集到的样品在污染地上移动更显费时费力且具有一定的安全隐患。且在坡度较大的地面上进行取样时,人容易站立不稳,且操作不便,取样设备以及样品容易滚落。
2、为解决上述问题,本发明提出了一种农业污染地巡检机器人。
技术实现思路
1、为解决背景技术中存在的问题,本发明提出了一种农业污染地巡检机器人。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种农业污染地巡检机器人包括机器人本体,机器人本体上设置有取样单元,取样单元包括取样组件和收集盒,机器人本体上开设有通道、第一存储腔、第二存储腔、滑道;通道、第一存储腔、第二存储腔的下部通过滑道连通;取样组件上下移动设置在通道内;第一存储腔内上下叠放有多个待使用的收集盒,将第一存储腔底端的收集盒移动到通道内,取样组件将采集到的样品放入到收集盒内,然后使该收集盒移动到第二存储腔内。
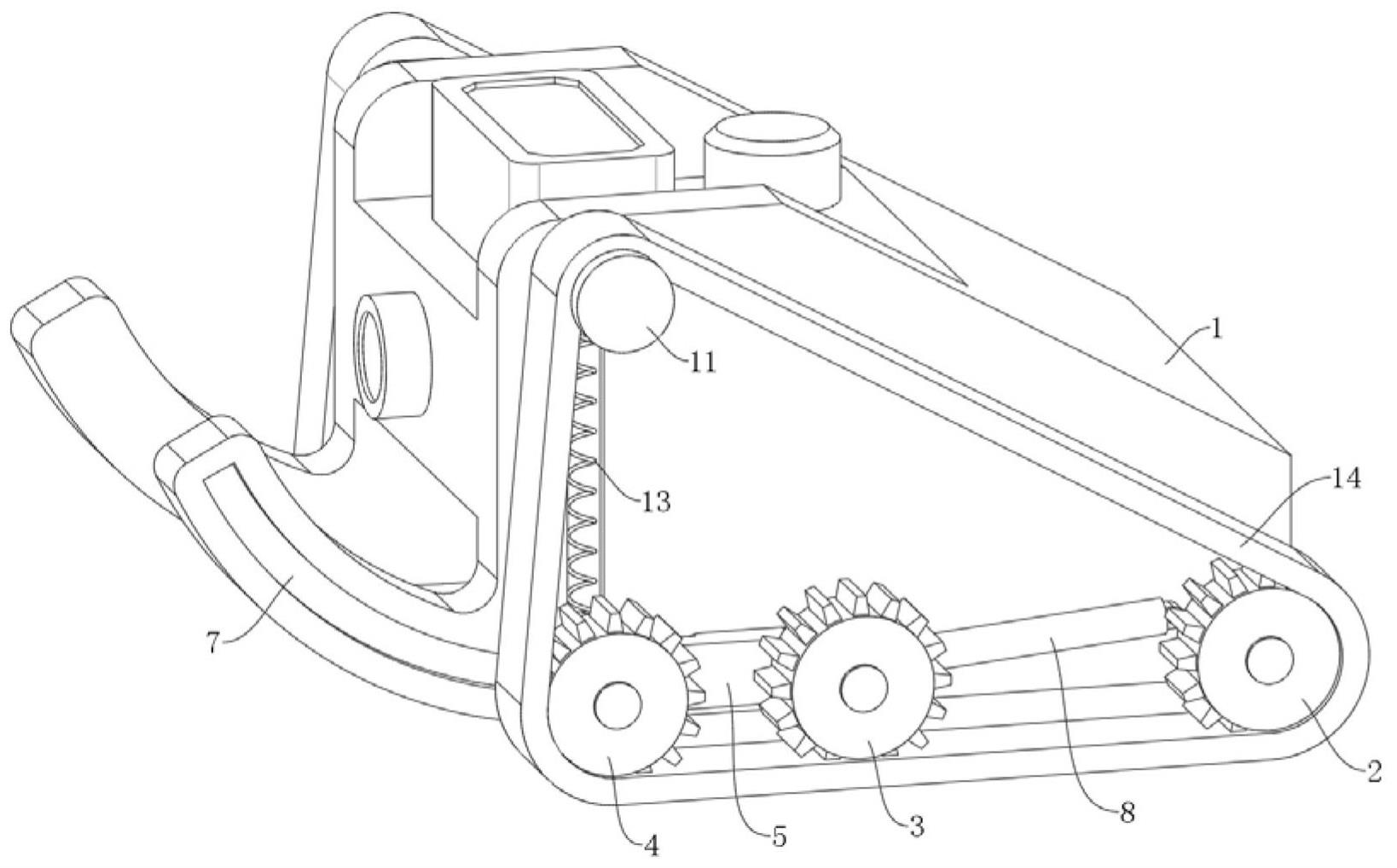
4、进一步地,机器人本体的两侧均设置有安装单元;安装单元包括第一履带轮、第二履带轮、第三履带轮、张紧轮;第一履带轮、第二履带轮、第三履带轮、张紧轮的轴线相互平行且均水平设置;第一履带轮转动设置在机器人本体的一端,机器人本体的两侧均开设有弧形滑槽,弧形滑槽的外凸面朝向地面,弧形滑槽内滑动设置有与弧形滑槽适配的连接件,第二履带轮和第三履带轮分别转动设置在同侧的连接件两端;张紧轮竖直滑动设置在机器人本体上;第一履带轮、第二履带轮、第三履带轮、张紧轮之间绕设有履带。
5、进一步地,连接件包括安装板和弧形滑块;第二履带轮和第三履带轮分别转动安装在同侧安装板的两端;弧形滑块与安装板固定连接;且弧形滑块与弧形滑槽滑动连接,弧形滑块与弧形滑槽相适配。
6、进一步地,机器人本体的两侧均设置有气缸;气缸的一端与机器人本体通过第一铰接轴铰接,气缸的另一端与同侧的安装板通过第二铰接轴铰接;第一铰接轴的轴线与第二铰接轴的轴线均与第一履带轮的轴线平行。
7、进一步地,机器人本体上竖直开设有t形滑槽,t形滑槽内限位滑动连接有滑动板;滑动板的一端固设有t形滑块,滑动板通过t形滑块与t形滑槽滑动连接;t形滑块与t形滑槽的下端端壁之间固定连接有弹簧;张紧轮转动安装在滑动板上;张紧轮远离滑动板的一侧固设有挡板。
8、进一步地,机器人本体上固设有第一电机,第一电机的电机轴与第一履带轮同轴固定连接;安装板上固设有第一电机和第三电机;第二电机的电机轴与第二履带轮同轴固连,第二电机的电机轴与第三履带轮同轴固连;第一电机、第二电机、第三电机的电机轴均不具有自锁功能。
9、进一步地,取样组件包括取样筒和滑动板,取样筒上下移动设置在通道内;取样筒开口向下,滑动板密封滑动设置在取样筒内;
10、机器人本体上开设有通孔,通孔通过滑道与通道连通,且通孔的轴线与第一电动推杆的轴线在同一个竖直线上,通孔与取样筒适配。
11、进一步地,第一存储腔位于通道的左侧,第二存储腔位于通道的右侧;第一存储腔的左侧设置有第一密封门,第二存储腔的右侧设置有第二密封门。
12、进一步地,滑道水平设置,且滑道的下端面与第一存储腔、通道、第二存储腔的下端面在同一个水平面上;滑道从第一存储腔的左侧向右延伸并依次贯穿第一存储腔、通道深入到第二存储腔内;滑道内滑动设置有推动板;推动板的高度、滑道的高度以及收集盒的高度相当;
13、机器人本体上水平固定安装有第三电动推杆,第三电动推杆的输出端水平向左,第三电动推杆的输出端与推动板固定连接。
14、进一步地,收集盒的上端面上开设有储存样品的收集槽,收集盒的右端开设有第一斜面,收集盒的左下角开设有第二斜面。
15、与现有技术相比,本发明具有以下有益效果:本发明方便进行流动采样,并且使采集到的多个样品独立的放置到第二存储腔内,且上下叠加,即可防止在移动过程中样品洒落又可适应多点采集的需求,方便了后续的检测处理,具有节省人力提高效率的作用。
16、变换采样地点时,通过使安装板沿着弧形滑槽滑动,安装板带动第二履带轮和第三履带轮同步运动,使第一履带轮和第二履带轮之间的轴间距逐渐增大即履带与地面的接触长度增大,同时位于第二履带轮和第三履带轮左侧之间的履带与地面的倾斜角度逐渐增大,进而提升所述机器人在地形复杂的路面上行驶的稳定性,提升所述机器人翻越不同高度障碍的能力。进而提升该机器人在不同路面的适应性。同时也方便在坡度较大的位置进行采样。
技术特征:
1.一种农业污染地巡检机器人,其特征在于:包括机器人本体(1),机器人本体(1)上设置有取样单元,取样单元包括取样组件和收集盒(27),机器人本体(1)上开设有通道(15)、第一存储腔(16)、第二存储腔(18)、滑道;通道(15)、第一存储腔(16)、第二存储腔(18)的下部通过滑道连通;取样组件上下移动设置在通道(15)内;第一存储腔(16)内上下叠放有多个待使用的收集盒(27),将第一存储腔(16)底端的收集盒(27)移动到通道(15)内,取样组件将采集到的样品放入到收集盒(27)内,然后使该收集盒(27)移动到第二存储腔(18)内。
2.根据权利要求1所述的一种农业污染地巡检机器人,其特征在于:机器人本体(1)的两侧均设置有安装单元;安装单元包括第一履带轮(2)、第二履带轮(3)、第三履带轮(4)、张紧轮(10);第一履带轮(2)、第二履带轮(3)、第三履带轮(4)、张紧轮(10)的轴线相互平行且均水平设置;第一履带轮(2)转动设置在机器人本体(1)的一端,机器人本体(1)的两侧均开设有弧形滑槽(7),弧形滑槽(7)的外凸面朝向地面,弧形滑槽(7)内滑动设置有与弧形滑槽(7)适配的连接件,第二履带轮(3)和第三履带轮(4)分别转动设置在同侧的连接件两端;张紧轮(10)竖直滑动设置在机器人本体(1)上;第一履带轮(2)、第二履带轮(3)、第三履带轮(4)、张紧轮(10)之间绕设有履带(14)。
3.根据权利要求2所述的一种农业污染地巡检机器人,其特征在于:连接件包括安装板(5)和弧形滑块(6);第二履带轮(3)和第三履带轮(4)分别转动安装在同侧安装板(5)的两端;弧形滑块(6)与安装板(5)固定连接;且弧形滑块(6)与弧形滑槽(7)滑动连接,弧形滑块(6)与弧形滑槽(7)相适配。
4.根据权利要求3所述的一种农业污染地巡检机器人,其特征在于:机器人本体(1)的两侧均设置有气缸(8);气缸(8)的一端与机器人本体(1)通过第一铰接轴铰接,气缸(8)的另一端与同侧的安装板(5)通过第二铰接轴铰接;第一铰接轴的轴线与第二铰接轴的轴线均与第一履带轮(2)的轴线平行。
5.根据权利要求2所述的一种农业污染地巡检机器人,其特征在于:机器人本体(1)上竖直开设有t形滑槽(12),t形滑槽(12)内限位滑动连接有滑动板(9);滑动板(9)的一端固设有t形滑块,滑动板(9)通过t形滑块与t形滑槽(12)滑动连接;t形滑块与t形滑槽(12)的下端端壁之间固定连接有弹簧(13);张紧轮(10)转动安装在滑动板(9)上;张紧轮(10)远离滑动板(9)的一侧固设有挡板(11)。
6.根据权利要求3所述的一种农业污染地巡检机器人,其特征在于:机器人本体(1)上固设有第一电机,第一电机的电机轴与第一履带轮(2)同轴固定连接;安装板(5)上固设有第一电机和第三电机;第二电机的电机轴与第二履带轮(3)同轴固连,第二电机的电机轴与第三履带轮(4)同轴固连;第一电机、第二电机、第三电机的电机轴均不具有自锁功能。
7.根据权利要求1所述的一种农业污染地巡检机器人,其特征在于:取样组件包括取样筒(22)和滑动板(24),取样筒(22)上下移动设置在通道(15)内;取样筒(22)开口向下,滑动板(24)密封滑动设置在取样筒(22)内;
8.根据权利要求7所述的一种农业污染地巡检机器人,其特征在于:第一存储腔(16)位于通道(15)的左侧,第二存储腔(18)位于通道(15)的右侧;第一存储腔(16)的左侧设置有第一密封门(17),第二存储腔(18)的右侧设置有第二密封门(19)。
9.根据权利要求8所述的一种农业污染地巡检机器人,其特征在于:滑道水平设置,且滑道的下端面与第一存储腔(16)、通道(15)、第二存储腔(18)的下端面在同一个水平面上;滑道从第一存储腔(16)的左侧向右延伸并依次贯穿第一存储腔(16)、通道(15)深入到第二存储腔(18)内;滑道内滑动设置有推动板(26);推动板(26)的高度、滑道的高度以及收集盒(27)的高度相当;
10.根据权利要求1所述的一种农业污染地巡检机器人,其特征在于:收集盒(27)的上端面上开设有储存样品的收集槽(28),收集盒(27)的右端开设有第一斜面(29),收集盒(27)的左下角开设有第二斜面(30)。
技术总结
本发明属于巡检机器人技术领域,涉及一种农业污染地巡检机器人。本发明包括机器人本体,机器人本体上设置有取样单元。取样单元包括取样组件和收集盒,收集盒叠放在第一储存腔内。机器人本体的两侧均设置有安装单元,每个安装单元上均设置有使机器人本体行走的履带。本发明方便进行流动采样,并且使采集到的多个样品独立的放置到第二存储腔内,以便后续的检测处理,具有节省人力提高效率的作用。变换采样地点时,通过改变第一履带轮和第二履带轮之间的轴间距,提升该机器人在不同路面的适应性。提升所述机器人在地形复杂的路面上行驶的稳定性,提升所述机器人翻越不同高度障碍的能力。同时也方便在坡度较大的位置进行采样。
技术研发人员:李书鹏,熊静,郭丽莉,王蓓丽,王思敏,莎莉
受保护的技术使用者:北京建工环境修复股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!