本发明属于无人驾驶领域,具体涉及一种虚实结合的无人驾驶场景测试系统及方法。
背景技术:
1、据统计,无人驾驶汽车需要在真实或者虚拟环境中至少进行110亿英里的里程测试,才能证明无人驾驶系统比人类驾驶员更可靠。目前车辆测试多用本地电脑和实体设备进行测试,测试场地受限,只能在实验室完成,并且需要测试设备、机柜等,对硬件的性能要求较高、成本较大。并且车辆测试中仿真场景的设计可在仿真软件中提供编辑操作,仿真场景一般基于图形化界面操作和添加运行指令完成编排,但是,场景数据及代码一般不会显示给用户,并且这些场景由于未与实车载体相结合,设计编排的场景不能发出指令,缺乏从场景生成、预览到下发、执行的“虚实结合”的表现方式,场景的验证效果较差。
技术实现思路
1、针对上述提出的技术问题,本发明提供一种虚实结合的无人驾驶场景测试系统及方法,旨在解决无人驾驶场景测试中的测试场地受限、测试成本较大以及场景验证效果差的问题。
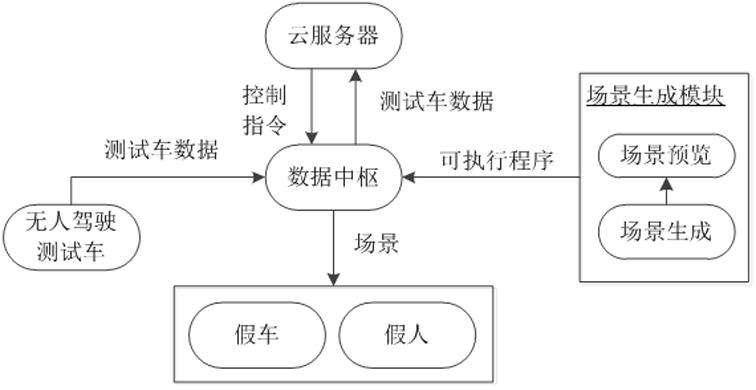
2、第一方面,本发明提供了一种虚实结合的无人驾驶场景测试系统,该系统包括:
3、无人驾驶测试车,通过车载传感器采集无人驾驶测试车的数据并上传至数据中枢;
4、场景生成模块,通过搭建场景模型完成场景编排,将场景模型编译为可执行程序,将所述可执行程序通过5g信号远程写入数据中枢;
5、数据中枢,接收无人驾驶测试车发送的数据并上传至云端服务器进行处理,接收云端服务器下发控制指令并将场景生成模块下发的可执行程序写入假人假车模块中;
6、云端服务器,接收数据中枢发送的数据进行云控运算并下发控制指令;
7、假人假车模块,用于接收并执行数据中枢模块下发的所述可执行程序。
8、进一步地,在所述假人假车模块接收并执行数据中枢下发的可执行程序之后,判断所述场景是否满足设计要求,若否,返回场景生成模块重新配置场景模型参数。
9、进一步地,若所述场景满足设计要求,则演示所述场景。
10、进一步地,所述搭建场景模型具体为:场景模型按照“前提场景-静态要素-动态场景”的结构搭建,并将泛化指标转化为模型参数;其中前提场景是现实环境场景,根据计划的测试场地进行标注;静态要素为测试障碍物假人假车模块,假人包括大人、儿童,假车包括汽车、电动车、自行车;动态场景为对测试障碍物动态任务进行定义,包括横穿、变道、抢道、碰撞、减速;泛化指标包括横穿速度、横穿加速度、变道方向、变道位置。
11、进一步地,测试场景生成模块还包括场景预览,即完成场景编排后,预览所述场景。
12、进一步地,预览所述场景之后,判断所述场景是否满足设计要求,若是,则将场景模型编译为可执行程序,将所述程序通过5g信号远程写入数据中枢模块,若否,重新配置场景模型参数。
13、第二方面,本发明提供了一种基于虚实结合的无人驾驶场景测试方法,该方法包括:步骤1:通过搭建场景模型完成场景编排;
14、步骤2:将场景模型编译为可执行程序,将所述可执行程序通过5g信号远程写入数据中枢;
15、步骤3:数据中枢接收云端服务器下发的控制指令,并将所述可执行程序写入假人假车模块中;
16、步骤4:判断场景是否满足设计要求,若是,执行步骤5,若否,返回步骤1;
17、步骤5:假人假车模块通过运行所述可执行程序演示所述场景。
18、进一步地,在所述步骤2之前还包括,通过仿真软件预览所述场景,判断所述场景是否满足设计要求,若是,执行步骤2,若否,返回步骤1。
19、第三方面,本发明提供了一种计算机存储介质,计算机存储介质存储有程序指令,其中,在程序指令运行时控制计算机存储介质所在设备执行上述任意一项的虚实结合的无人驾驶场景测试方法。
20、第四方面,本发明提供了一种处理器,处理器用于运行程序,其中,程序运行时执行上述任意一项的虚实结合的无人驾驶场景测试方法。
21、与现有技术相比,本发明的有益效果为:(1)该系统通过数据中枢、云服务器来完成数据处理,不受场地、设备的限制;
22、(2)该系统可以将场景模型的数据现实化,所有场景均可被执行和演绎;
23、(3)该系统增加了用仿真软件作场景预览的环节,可以极大减少场景设计过程中误操作;
24、(4)该系统场景模型按照“前提场景-静态要素-动态场景”的结构搭建,解决了无人驾驶标准中测试场景复杂度不足和后期扩展编排问题,从而全方位实现自动人驾驶场景的全覆盖编排;
25、(5)该系统定义了场景编排、预览、下发的过程,使得整个无人驾驶实车测试过程更加严谨规范,增加了场景验证效果。
技术特征:1.一种虚实结合的无人驾驶场景测试系统,其特征在于,包括:
2.根据权利要求1所述的虚实结合的无人驾驶场景测试系统,其特征在于,在所述假人假车模块接收并执行数据中枢下发的可执行程序之后,判断所述场景是否满足设计要求,若否,返回场景生成模块重新配置场景模型参数。
3.根据权利要求2所述的虚实结合的无人驾驶场景测试系统,其特征在于,若所述场景满足设计要求,则演示所述场景。
4.根据权利要求1所述的虚实结合的无人驾驶场景测试系统,其特征在于,所述搭建场景模型具体为:场景模型按照“前提场景-静态要素-动态场景”的结构搭建,并将泛化指标转化为模型参数;其中前提场景是现实环境场景,根据计划的测试场地进行标注;静态要素为测试障碍物假人假车模块,假人包括大人、儿童,假车包括汽车、电动车、自行车;动态场景为对测试障碍物动态任务进行定义,包括横穿、变道、抢道、碰撞、减速;泛化指标包括横穿速度、横穿加速度、变道方向、变道位置。
5.根据权利要求4所述的虚实结合的无人驾驶场景测试系统,其特征在于,测试场景生成模块还包括场景预览,即完成场景编排后,预览所述场景。
6.根据权利要求5所述的虚实结合的无人驾驶场景测试系统,其特征在于,预览所述场景之后,判断所述场景是否满足设计要求,若是,则将场景模型编译为可执行程序,将所述可执行程序通过5g信号远程写入数据中枢模块,若否,重新配置场景模型参数。
7.一种基于虚实结合的无人驾驶场景测试方法,其特征在于,该方法包括:
8.根据权利要求7所述的虚实结合的无人驾驶场景测试方法,其特征在于,在所述步骤2之前还包括,通过仿真软件预览所述场景,判断所述场景是否满足设计要求,若是,执行步骤2,若否,返回步骤1。
9.一种计算机存储介质,其特征在于,所述计算机存储介质存储有程序指令,其中,在所述程序指令运行时控制所述计算机存储介质所在设备执行权利要求7至8中任意一项所述的虚实结合的无人驾驶场景测试方法。
10.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求7至8中任意一项所述的虚实结合的无人驾驶场景测试方法。
技术总结本发明涉及一种虚实结合的无人驾驶场景测试系统及方法,该系统包括:无人驾驶测试车,通过车载传感器采集自身的数据;场景生成模块,通过搭建场景模型完成场景编排,预览并判断所述场景是否满足设计要求,若是,将场景模型编译为可执行程序并将其远程写入数据中枢;数据中枢,接收无人驾驶测试车发送的数据并上传至云端服务器,接收云端服务器下发的控制指令并所述可执行程序写入假人假车模块中;云端服务器,接收数据中枢发送的数据进行云控运算并下发控制指令;假人假车模块,用于接收并执行所述可执行程序。本发明所有数据均在云端服务器处理,不受场地、设备的限制,并且定义了场景的编排、预览、下发、修改等,使得测试过程更加高效严谨。
技术研发人员:沈斌
受保护的技术使用者:东风悦享科技有限公司
技术研发日:技术公布日:2024/1/15