一种大型囊体泄漏缺陷检测系统
本发明属于大型囊体气密性检测,尤其涉及一种大型囊体泄漏缺陷检测系统。
背景技术:
1、大型囊体缺陷直接影响其气密性,成为制约飞艇、高空气球发展和应用的难点问题。对于几十米长的高空气球或者几百米的飞艇来说,其囊体基本都是由多瓣囊体焊接而成,其焊接成型工作多为手动或者半自动化焊接,在焊接过程中对囊体材料的拖拽、折叠或者尖锐物体的摩擦等,均会对囊体造成损伤,甚至造成泄露风险。目前对于囊体整体泄露的检测还没有统一的标准,囊体局部的检测也是一项具有挑战性的任务,现有手段基本集中于通过气密性检测如涂抹法来确定囊体的缺陷位置,该方法不仅存在污染囊体的风险,而且成本较高,耗时较长,因此亟需一种大型囊体泄漏缺陷检测系统。
技术实现思路
1、为解决上述技术问题,本发明提出了一种大型囊体泄漏缺陷检测系统,解决了大型囊体缺陷的检测以及位置的确定,集合机器人及定位系统,可以在不损伤囊体的情况下,快速检测到缺陷信息及位置并进行反馈。
2、为实现上述目的,本发明提供了一种大型囊体泄漏缺陷检测系统,包括:
3、囊体检测子系统、定位及辅助决策子系统和通信子系统,所述通信子系统分别与所述囊体检测子系统、所述定位及辅助决策子系统通信连接;
4、所述囊体检测子系统,用于接收所述定位及辅助决策子系统的控制命令,实时检测囊体,并将检测结果发送给所述定位及辅助决策子系统;
5、所述定位及辅助决策子系统,用于对接收所述检测结果,并对所述囊体进行建模及定位,获取所述囊体检测的实时位置并且自动识别缺陷位置;
6、所述通信子系统,用于所述囊体检测子系统和所述定位及辅助决策子系统之间的数据通信。
7、可选的,所述囊体检测子系统包括囊体内侧检测模块和囊体外侧检测模块;
8、所述囊体内侧检测模块,用于实时检测所述囊体的内侧表面;
9、所述囊体外侧检测模块,用于实时检查所述囊体的外侧表面,并通过磁力作用带动所述囊体内侧检测模块,同时将检测结果发送给所述定位及辅助决策子系统。
10、可选的,所述囊体内侧检测模块包括第一壳体、第一安装板,第一电池、聚四氟乙烯垫片、第一牛眼轮、第一磁铁和led灯带;所述安装板的一侧设置所述第一电池,所述第一壳体与所述第一安装板安装有所述第一电池的一侧卡接,所述第一安装板的另一侧根据预置要求分别设置所述聚四氟乙烯垫片、所述第一牛眼轮、所述第一磁铁和所述led灯带。
11、可选的,所述囊体外侧检测模块包括驱动电机、第二壳体、第二安装板、第二电池、低阻轮胎、第二牛眼轮、第二磁铁和线性ccd传感器及数据处理中心;所述第二安装板的一侧设置所述驱动电机和所述第二电池,所述第二壳体与所述第二安装板安装有所述驱动电机和所述第二电池的一侧卡接,所述第二安装板的另一侧根据预置要求分别设置有所述低阻轮胎、所述第二牛眼轮、所述第二磁铁和所述线性ccd传感器及数据处理中心。
12、可选的,所述第一磁铁与所述第二磁铁位置相对应,所述第一牛眼轮与所述第二牛眼轮位置相对应。
13、可选的,所述定位及辅助决策子系统包括决策辅助与人机交互模块、定位标签模块及远程激光扫描雷达模块;
14、所述决策辅助与人机交互模块,用于对所述囊体外侧检测模块发送控制指令及接收所述检测结果;
15、所述定位标签模块,与所述决策辅助与人机交互模块连接,构建相对定位系统,获取所述囊体检测的实时位置;
16、所述远程激光扫描雷达模块,与所述决策辅助与人机交互模块连接,对所述囊体进行建模。
17、可选的,对所述囊体外侧检测模块发送控制指令包括:
18、通过对所述决策辅助与人机交互模块输入移动指令,所述囊体外侧检测模块接收所述移动指令,根据所述移动指令控制所述囊体外侧检测模块进行所述囊体不同位置的检测。
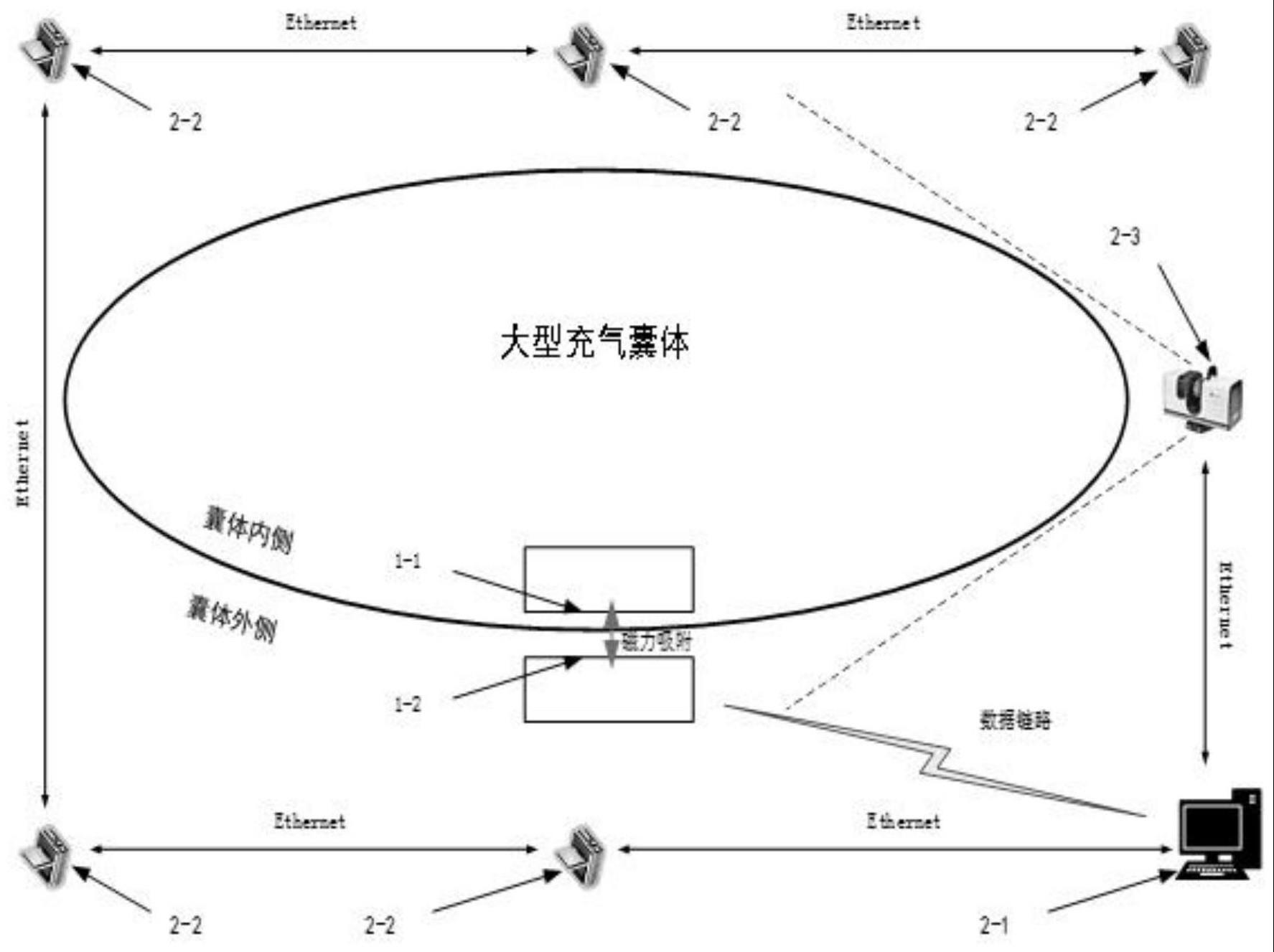
19、本发明技术效果:本发明公开了一种大型囊体泄漏缺陷检测系统,将囊体内侧机器人放于气球内部,囊体外侧机器人放于气球外部同一位置,吸附于气球表面,囊体外侧机器人作为主动部分,配有视觉检测装置及通信部件,可以接收决策辅助与人机交互装置发来的指令,在uwb定位标签和远程激光3d扫描装置协同工作下,确定机器人在囊体上的位置和姿态,以完成机器人对囊体外表面全覆盖与缺陷位置标记,同时还可通过决策辅助与人机交互装置实现检测参数,如检测速度、检测区域的输入,多台机器人的巡检路径规划、囊体缺陷分析与位置显示等;解决了大型囊体缺陷的检测以及位置的确定,集合机器人及定位系统,可以在不损伤囊体的情况下,快速检测到缺陷信息及位置并进行反馈。
技术特征:
1.一种大型囊体泄漏缺陷检测系统,其特征在于,包括:
2.如权利要求1所述的大型囊体泄漏缺陷检测系统,其特征在于,
3.如权利要求2所述的大型囊体泄漏缺陷检测系统,其特征在于,
4.如权利要求3所述的大型囊体泄漏缺陷检测系统,其特征在于,
5.如权利要求4所述的大型囊体泄漏缺陷检测系统,其特征在于,
6.如权利要求2所述的大型囊体泄漏缺陷检测系统,其特征在于,
7.如权利要求6所述的大型囊体泄漏缺陷检测系统,其特征在于,
技术总结
本发明公开了一种大型囊体泄漏缺陷检测系统,包括:囊体检测子系统、定位及辅助决策子系统和通信子系统,通信子系统分别与囊体检测子系统、定位及辅助决策子系统通信连接;囊体检测子系统,用于接收定位及辅助决策子系统的控制命令,实时检测囊体,并将检测结果发送给定位及辅助决策子系统;定位及辅助决策子系统,用于对接收检测结果,并对囊体进行建模及定位,获取囊体检测的实时位置并且自动识别缺陷位置;通信子系统,用于囊体检测子系统和定位及辅助决策子系统之间的数据通信。本发明解决了大型囊体缺陷的检测以及位置的确定,集合机器人及定位系统,在不损伤囊体的情况下,快速检测到缺陷信息及位置并进行反馈。
技术研发人员:吕超,郭虓,袁佳策,孙笠然,郑宝金
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!