一种基于线激光目标识别的接触线振动测量系统及方法与流程
本发明涉及轨道交通接触网,尤其涉及一种基于线激光目标识别的接触线振动测量系统及方法。
背景技术:
1、随着铁路交通运输网络和城市轨道交通网络规模的不断扩大和日趋完善,铁路和市轨道交通的相关运营维护部门的接触网检修任务也日益繁重。为有效提升铁路运输能力和运输效率,铁路运营维护部门必须在控制检修时间的同时有效提高检修作业的质量和效率,这就要求铁路运营维护部门采用更先进的检测技术和更科学的分析方法,从检测技术、检测精度等方面提高日常检修的效率,满足既有线路日常维护保养工作和新建线路的施工验收接管工作的需要。
2、接触网是电气化铁路和轨道交通的牵引供电系统的重要设备。电力机车通过受电弓网与接触线滑动接触并获得电能。要保证电气化铁路和轨道交通的安全运营、保证弓网的良好接触和可靠取流,除了在接触网设计、施工和运营方面达到一定的规范要求外,还必须定期对接触网进行检测,以便及时发现并消除隐患。接触线的振动测量是接触网检测中的重要一环。
技术实现思路
1、本发明提出了一种基于线激光目标识别的接触线振动测量系统及方法,可实现对接触线振动的精准测量,为接触网的检修维护提供指导依据。
2、第一方面,一种基于线激光目标识别的接触线振动测量方法,采用基于机器视觉的激光光切测量原理的非接触的测量方式,包括以下步骤:
3、步骤s1:将线激光成一定的角度从侧面投射到接触线上,对线激光光条在接触线上的畸变图像进行拍摄;
4、步骤s2:记录接触线振动光条高低空间位置变化时的畸变图像位置变化;
5、步骤s3:对记录的畸变图像进行处理,找出接触线底部在图像中的像素坐标并进行坐标系计算,计算出线激光投射在接触线的畸变图像的像素位置变化;
6、步骤s4:结合相机标定的内外参数计算出接触线在实际空间垂直方向的振动量。
7、进一步,所述步骤s3畸变图像处理包括以下子步骤:
8、步骤s31:统计全图的平均灰度值,判断图像亮度,分辨图像为白天或者夜晚并分别进行处理,得到像素坐标点;
9、步骤s32:对得到的所有坐标点根据距离进行分类聚合;
10、步骤s33:判断分类集合后的坐标点集是否符合激光投射到接触线上的排列方式和面积;
11、步骤s34:根据识别到的接触线位置变化关系,确定最终的接触线集合坐标点集;
12、步骤s35:确定最终的接触线坐标点,将接触线坐标点通过标定文件,利用三角测量法转换为实际空间坐标点。
13、进一步,所述步骤s33判断方式包括排列方式判断和坐标点数量判断。
14、进一步,所述步骤s35确定最终的接触线坐标点方法包括光条重心提取算法以及几何中心法。
15、进一步,所述步骤s31还包括:若图像为白天,则对图像进行预处理,具体包括:
16、步骤s311:对相机采集图像的高度方向上的图像进行差分过滤,去除灰度相同的背景,并根据预设的阈值对图像进行二值化得到图像中的白色光斑;
17、步骤s312:对二值化后得到的图像白色光斑进行y方向的膨胀处理,消除y方向差分造成的激光光斑分离;
18、步骤s 313:依次查找白色光斑坐标点,并加入到坐标点容器内。
19、进一步,所述步骤s31还包括:若图像为夜晚,则对每个像素点的灰度值进行判断,筛选出灰度值大于预设阈值的像素点坐标,加入到坐标点容器内。
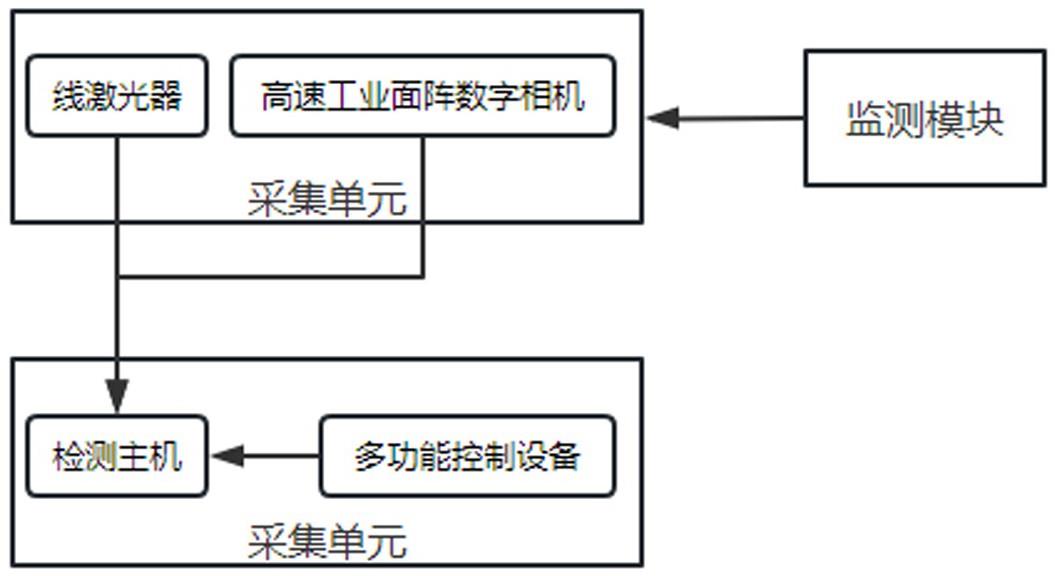
20、另一方面,一种基于线激光目标识别的接触线振动测量系统,用于实现基于线激光目标识别的接触线振动测量方法,包括采集单元和处理单元,所述采集单元实时采集接触线振动状态,包括线激光器和高速工业面阵数字相机,所述线激光器和高速工业面阵数字相机与处理单元检测主机连接进行采集单元图像数据的存储和处理。
21、进一步,所述处理单元还包括多功能控制设备。
22、进一步,还包括监测模块,所述监测模块与采集单元连接并对采集单元数据进行实时监测。
23、本发明的有益效果:本发明提出了一种基于线激光目标识别的接触线振动测量系统及方法,系统采用基于机器视觉的激光光切测量原理的非接触的测量方式,主要由线激光器和高速工业面阵数字相机等组成,通过采集线激光投射在接触线上的图像,实时在线测量接触线的振动,采用线激光成像及图像识别分析技术,无需人员现场操作,可实现在无人值守情况下对接触线振动状态的实时监测、分析,受环境影响较小,可适用于任意监测环境,为接触网的检修维护提供依据。
技术特征:
1.一种基于线激光目标识别的接触线振动测量方法,其特征在于,采用基于机器视觉的激光光切测量原理的非接触的测量方式,包括以下步骤:
2.根据权利要求1所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,所述步骤s3畸变图像处理包括以下子步骤:
3.根据权利要求2所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,所述步骤s33判断方式包括排列方式判断和坐标点数量判断。
4.根据权利要求2所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,所述步骤s35确定最终的接触线坐标点方法包括光条重心提取算法以及几何中心法。
5.根据权利要求2所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,所述步骤s31还包括:若图像为白天,则对图像进行预处理,具体包括:
6.根据权利要求3所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,所述步骤s31还包括:若图像为夜晚,则对每个像素点的灰度值进行判断,筛选出灰度值大于预设阈值的像素点坐标,加入到坐标点容器内。
7.一种基于线激光目标识别的接触线振动测量系统,用于实现权利要求1~6任意一项所述的一种基于线激光目标识别的接触线振动测量方法,其特征在于,包括采集单元和处理单元,所述采集单元实时采集接触线振动状态,包括线激光器和高速工业面阵数字相机,所述线激光器和高速工业面阵数字相机与处理单元检测主机连接进行采集单元图像数据的存储和处理。
8.根据权利要求7所述的一种基于线激光目标识别的接触线振动测量系统及方法,其特征在于,所述处理单元还包括多功能控制设备。
9.根据权利要求8所述的一种基于线激光目标识别的接触线振动测量系统及方法,其特征在于,还包括监测模块,所述监测模块与采集单元连接并对采集单元数据进行实时监测。
技术总结
本发明公开了一种基于线激光目标识别的接触线振动测量系统及方法,系统采用基于机器视觉的激光光切测量原理的非接触的测量方式,主要由线激光器和高速工业面阵数字相机等组成,通过采集线激光投射在接触线上的图像,实时在线测量接触线的振动,采用线激光成像及图像识别分析技术,无需人员现场操作,可实现在无人值守情况下对接触线振动状态的实时监测、分析,受环境影响较小,可适用于任意监测环境,为接触网的检修维护提供依据。
技术研发人员:冯超,刘兰,代洪宇,李鲲鹏,赵云云,林珊,艾晓宇,柳恩恩,牛景露,田彩,王秋实,张鹏飞,任智星,王春来,黄健煜,刘好文,杨杰
受保护的技术使用者:广州地铁设计研究院股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!