本发明涉及柔性传感器,更具体地,涉及一种基于软硬复合传感层的柔性力学传感器及其制备方法。
背景技术:
1、力学传感器能够在受到外力刺激时产生电阻、电容、电位等信号变化,从而用于感知压强或者应变,广泛应用于健康检测、工业生产安全监测等方面。然而传统的硅基压力传感器由于其物理变形局限性,难以与不规则表面紧密贴合,使得压力检测精度和准确性不能满足要求。目前力学传感器功能单一以及灵敏度和检测范围相互制约,也使其应用场景收到了较大的限制。
2、柔性力学传感器通过材料和结构设计,能够实现柔韧性和功能性的兼顾,从而实现信号的精准采集和高效交互,也是推动电子器件设计集成发展的关键技术手段。
3、随着电子信息技术的发展,人机交互的需求日益提升,为实现人体动作信号的精准采集从而提升人机交互效率,亟需开发可贴敷/可穿戴且具有高灵敏度、低检测下限、宽检测范围和快速响应能力的柔性力学传感器。
4、现有技术中公开了一种柔性形变压力传感器及其制备方法,传感器包括:自下而上叠层设置的第一柔性材料层、压敏层、电极层和第二柔性材料层,所述第一柔性材料层和第二柔性材料层分别包括柔性材料,所述压敏层包括具有间距的正多边形激光诱导石墨烯,所述电极层包括在基底材料上形成的电极;但现有技术中的柔性压力传感器仍然无法兼顾灵敏度和检测范围,且传感层与柔性基底层间界面结合差,影响器件力学稳定性,使其使用场景受限。
技术实现思路
1、本发明为克服上述现有技术中的柔性力学传感器无法兼顾灵敏度和检测范围,以及使用场景受限的缺陷,提供一种基于软硬复合传感层的柔性力学传感器及其制备方法,能够对多种力学信号(如压力、拉力、弯曲、扭转等)进行检测,在宽检测范围内仍保持高灵敏度,并具有极低的检测限和超快的应变响应/恢复能力。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种基于软硬复合传感层的柔性力学传感器,包括:自下而上叠层设置的柔性基底层、复合传感层和电极层;
4、所述复合传感层为刚性的激光诱导石墨烯和柔性的弹性体的复合材料;所述电极层包括设置在复合传感层两端的正负电极。
5、优选地,所述复合传感层中的弹性体材料具体为ecoflex、聚二甲基硅氧烷和热塑性聚氨酯中的任意一种。
6、优选地,所述复合传感层中的激光诱导石墨烯为泡沫结构,激光诱导石墨烯和弹性体的复合方式为:将所述弹性体填充至所述激光诱导石墨烯的泡沫结构中,完成复合。
7、优选地,所述激光诱导使用的激光器为脉冲激光器和co2激光器中的任意一种。
8、优选地,所述电极层的正负电极均为铜线电极,铜线电极的直径为0.1~1mm。
9、本发明还提供一种基于软硬复合传感层的柔性力学传感器制备方法,用于制备上述的柔性力学传感器,包括以下步骤:
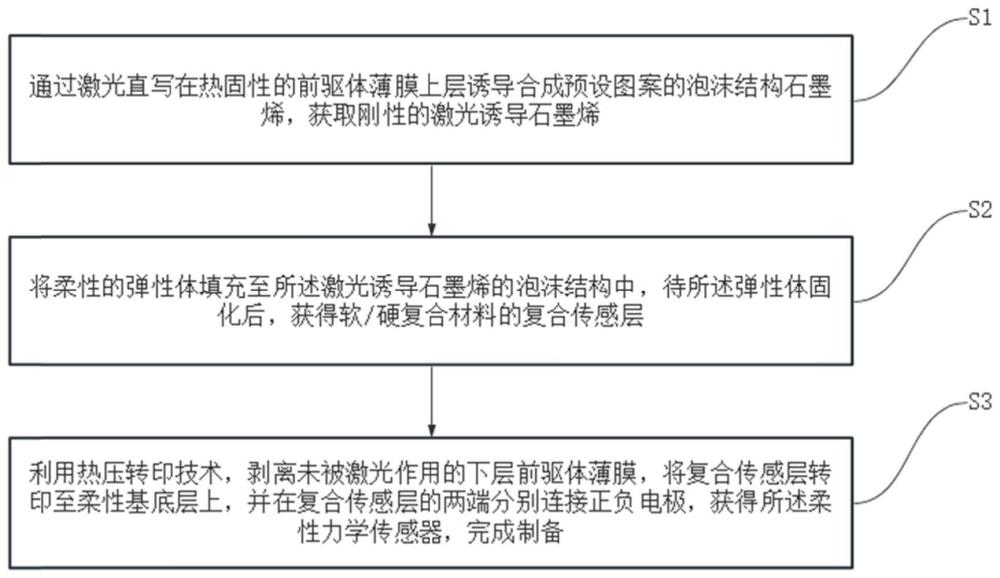
10、s1:通过激光直写在热固性的前驱体薄膜上层诱导合成预设图案的泡沫结构石墨烯,获取刚性的激光诱导石墨烯;
11、s2:将柔性的弹性体填充至所述激光诱导石墨烯的泡沫结构中,待所述弹性体固化后,获得软/硬复合材料的复合传感层;
12、s3:利用热压转印技术,剥离未被激光作用的下层前驱体薄膜,将复合传感层转印至柔性基底层上,并在复合传感层的两端分别连接正负电极,获得所述柔性力学传感器,完成制备。
13、优选地,所述步骤s1中,前驱体的材料具体为聚酰亚胺,前驱体薄膜厚度为5~75μm。
14、优选地,所述步骤s1中,激光光源为飞秒激光,直写的激光平均功率为50~900mw,激光扫描速度为25~500mm/s,激光作用次数为1~10次。
15、优选地,所述步骤s2中,弹性体固化的固化环境为自然环境或真空环境,固化温度为25~80℃。
16、优选地,所述步骤s3中,柔性基底层的材料为ecoflex、聚二甲基硅氧烷和热塑性聚氨酯中的任意一种。
17、与现有技术相比,本发明技术方案的有益效果是:
18、本发明提供一种基于软硬复合传感层的柔性力学传感器及其制备方法,首先获取丰富碳含量的热塑性聚酰亚胺薄膜作为前驱体,通过激光直写在前驱体上诱导合成预设图案的泡沫结构石墨烯,获取刚性的石墨烯导电框架;将柔性的弹性体填充至所述激光诱导石墨烯的泡沫结构中,待所述弹性体固化后,获得软/硬复合传感层;利用热压转印技术,剥离未被激光作用的前驱体,将传感层转印至柔性基底上;在复合传感层的两端分别连接正负电极,获得所述柔性力学传感器,完成制备;
19、本发明提供的力学传感器具有独特的刚性石墨烯和柔性弹性体复合的传感层结构,在压力作用下相邻石墨烯纳米片接触面积变大,接触电阻减小,因此器件导电性变好;而在拉力作用下,相邻石墨烯纳米片接触面积变小,接触电阻增大,因此器件导电性变差;当器件在大的形变条件下,弹性体填充物可以保证器件结构完整并使器件与基底间的界面结合力强,因此器件可以在较宽的检测范围内对多种力学信号精确检测;另外,由于传感器具有超薄的传感层(厚度约为20μm),在微小外力作用下导电网络即能发生较大变化,因此该力学传感器具有极高的灵敏度,并展现出了超快的响应/恢复速度;本发明的优异性能显示其在人体健康监测、工业生产、智能机器人等领域具有广泛应用前景。
技术特征:1.一种基于软硬复合传感层的柔性力学传感器,其特征在于,包括:自下而上叠层设置的柔性基底层、复合传感层和电极层;
2.根据权利要求1所述的一种基于软硬复合传感层的柔性力学传感器,其特征在于,所述复合传感层中的弹性体材料具体为ecoflex、聚二甲基硅氧烷和热塑性聚氨酯中的任意一种。
3.根据权利要求2所述的一种基于软硬复合传感层的柔性力学传感器,其特征在于,所述复合传感层中的激光诱导石墨烯为泡沫结构,激光诱导石墨烯和弹性体的复合方式为:将所述弹性体填充至所述激光诱导石墨烯的泡沫结构中,完成复合。
4.根据权利要求3所述的一种基于软硬复合传感层的柔性力学传感器,其特征在于,所述激光诱导使用的激光器为脉冲激光器和co2激光器中的任意一种。
5.根据权利要求4所述的一种基于软硬复合传感层的柔性力学传感器,其特征在于,所述电极层的正负电极均为铜线电极,铜线电极的直径为0.1~1mm。
6.一种基于软硬复合传感层的柔性力学传感器制备方法,用于制备权利要求1~5任意一项中所述的柔性力学传感器,其特征在于,包括以下步骤:
7.根据权利要求6所述的一种基于软硬复合传感层的柔性力学传感器,其特征在于,所述步骤s1中,前驱体的材料具体为聚酰亚胺,前驱体薄膜厚度为5~75μm。
8.根据权利要求7所述的一种基于软硬复合传感层的柔性力学传感器制备方法,其特征在于,所述步骤s1中,激光直写的激光平均功率为50~900mw,激光扫描速度为25~500mm/s,激光作用次数为1~10次。
9.根据权利要求8所述的一种基于软硬复合传感层的柔性力学传感器制备方法,其特征在于,所述步骤s2中,弹性体固化的固化环境为自然环境或真空环境,固化温度为25~80℃。
10.根据权利要求9所述的一种基于软硬复合传感层的柔性力学传感器制备方法,其特征在于,所述步骤s3中,柔性基底层的材料为ecoflex、聚二甲基硅氧烷和热塑性聚氨酯中的任意一种。
技术总结本发明提供一种基于软硬复合传感层的柔性力学传感器及其制备方法,力学传感器包括:自下而上叠层设置的柔性基底层、复合传感层和电极层;所述复合传感层为刚性的激光诱导石墨烯和柔性的弹性体的复合材料;所述电极层包括设置在复合传感层两端的正负电极;本发明提供的可拉伸力学传感器具有独特的刚性石墨烯和柔性弹性体复合的传感层结构,当器件在大的形变条件下,弹性体填充物可以保证器件结构完整,因此器件可以在较宽的形变范围内对多种力学信号精确检测;另外,本发明具有极高的灵敏度和超快的响应/恢复速度,该力学传感器的优异性能显示其在人体健康监测、工业生产、智能机器人等领域具有广泛应用前景。
技术研发人员:安佳宁,孙庚志
受保护的技术使用者:暨南大学
技术研发日:技术公布日:2024/1/15