一种基于显著特征的动态场景移动机器人定位方法及系统与流程
本发明属于即时定位与地图构建,尤其涉及一种基于显著特征的动态场景移动机器人定位方法及系统。
背景技术:
1、目前的移动机器人定位技术大多都是基于预先建好的地图进行定位。然而,移动机器人的工作环境是动态变化的,比如工厂或商场环境随着时间的推移,设备、货架或临时摊位等位置会发生变化,这些变化都会大幅度改变现有的移动机器人工作环境,使得机器人无法稳定执行任务。
2、发明人发现,由于预构建的地图是静态的,无法实时更新,这导致移动机器人无法准确感知并适应环境的变化,从而影响了其定位能力。有些算法具有地图更新的能力,但是地图更新往往需要一个长期迭代的过程无法应对即时的变化;还有一些算法尝试增加传感器或其他环境特征进而获取更多信息来应对环境变化,如增加视觉传感器或在环境中加入反光柱、二维码等,但这也会带来计算复杂度以及部署成本的提升,并且,由于视觉对光线条件的依赖或者某些场景不允许使用反光柱或二维码,这都会限制机器人在某些场景下的应用。
技术实现思路
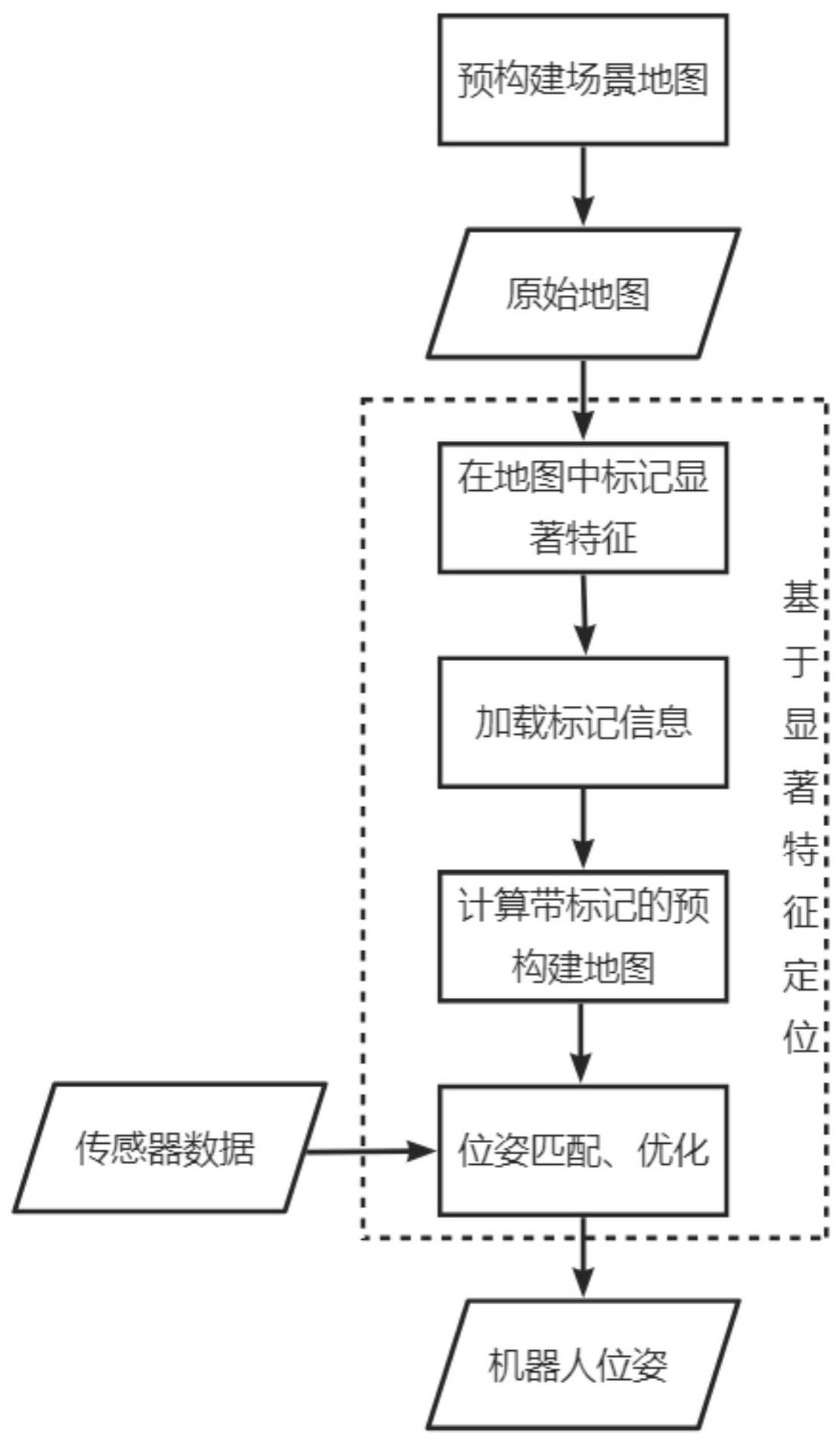
1、本发明为了解决上述问题,提出了一种基于显著特征的动态场景移动机器人定位方法及系统,本发明通过标记动态场景下的显著特征来增加定位算法对变化场景中固定区域的置信度,降低对变化区域的置信度,从而加大固定特征对定位的贡献,减少非固定特征对定位的干扰,以达到提高定位稳定性的目的。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、第一方面,本发明提供了一种基于显著特征的动态场景移动机器人定位方法,包括:
4、将动态场景分为多个固定区域和多个非固定区域,对固定区域和非固定区域进行显著特征标记;对固定区域和非固定区域赋予权重,赋予固定区域的权重高于赋予非固定区域的权重;
5、根据原始栅格地图和标记的显著特征,得到似然域地图,其中似然值按照对固定区域和非固定区域赋予权重进行加权调整;
6、根据移动机器人获得的激光点在所述似然域地图中的匹配,对移动机器人定位。
7、进一步的,所述固定区域包括墙角和柱子,所述非固定区域包括仓库的临时货区和商场的临时摊位。
8、进一步的,在概率栅格地图中,权重根据概率值与栅格到障碍物的距离进行调整。
9、进一步的,显著特征包括区域的形状、位置和权重。
10、进一步的,形状包括多边形、矩形和圆形;多边形的位置为依次连接各顶点的顶点坐标,矩形的位置为两个对角的顶点坐标,圆形的位置为圆心坐标和半径。
11、进一步的,似然域地图被建模为高斯分布;观测越靠近栅格中障碍物,获得的似然值越高;观测越远离栅格中障碍物,获得的似然值越低。
12、进一步的,将移动机器人获得的激光扫描帧中每个激光点当前的位姿映射到似然域地图中;当激光点映射到非固定区域对应的权重区域时获得的似然值,低于映射到固定区域对应的权重区域时获得的似然值;将获得的所有似然值相加得到总似然值;将总似然值中最高的位姿作为最优位姿,而完成机器人的一次定位。
13、第二方面,本发明还提供了一种基于显著特征的动态场景移动机器人定位系统,包括:
14、标记模块,被配置为:将动态场景分为多个固定区域和多个非固定区域,对固定区域和非固定区域进行显著特征标记;对固定区域和非固定区域赋予权重,赋予固定区域的权重高于赋予非固定区域的权重;
15、似然域地图建立模块,被配置为:根据原始栅格地图和标记的显著特征,得到似然域地图,其中似然值按照对固定区域和非固定区域赋予权重进行加权调整;
16、定位模块,被配置为:根据移动机器人获得的激光点在所述似然域地图中的匹配,对移动机器人定位。
17、第三方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现了第一方面所述的基于显著特征的动态场景移动机器人定位方法的步骤。
18、第四方面,本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现了第一方面所述的基于显著特征的动态场景移动机器人定位方法的步骤。
19、与现有技术相比,本发明的有益效果为:
20、本发明中首先,将动态场景分为多个固定区域和多个非固定区域,对固定区域和非固定区域进行显著特征标记;对固定区域和非固定区域赋予权重,赋予固定区域的权重高于赋予非固定区域的权重;然后,根据原始栅格地图和标记的显著特征,得到似然域地图,其中似然值按照对固定区域和非固定区域赋予的权重进行加权调整;最后,根据移动机器人获得的激光点在所述似然域地图中的匹配,对移动机器人定位;通过标记动态场景下的显著特征来增加定位算法对变化场景中固定区域的置信度,降低对变化区域的置信度,从而加大固定特征对定位的贡献,减少非固定特征对定位的干扰,以达到提高定位稳定性的目的;本发明中的方法无需增加额外的传感器,也不需要对现有场景重新部署,不会增加额外的设备及部署成本,可以即时的对动态场景进行标记使用。
技术特征:
1.一种基于显著特征的动态场景移动机器人定位方法,其特征在于,包括:
2.如权利要求1所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,所述固定区域包括墙角和柱子,所述非固定区域包括仓库的临时货区和商场的临时摊位。
3.如权利要求1所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,在概率栅格地图中,权重根据概率值与栅格到障碍物的距离进行调整。
4.如权利要求1所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,显著特征包括区域的形状、位置和权重。
5.如权利要求4所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,形状包括多边形、矩形和圆形;多边形的位置为依次连接各顶点的顶点坐标,矩形的位置为两个对角的顶点坐标,圆形的位置为圆心坐标和半径。
6.如权利要求1所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,似然域地图被建模为高斯分布;观测越靠近栅格中障碍物,获得的似然值越高;观测越远离栅格中障碍物,获得的似然值越低。
7.如权利要求1所述的一种基于显著特征的动态场景移动机器人定位方法,其特征在于,将移动机器人获得的激光扫描帧中每个激光点当前的位姿映射到似然域地图中;当激光点映射到非固定区域对应的权重区域时获得的似然值,低于映射到固定区域对应的权重区域时获得的似然值;将获得的所有似然值相加得到总似然值;将总似然值中最高的位姿作为最优位姿,而完成机器人的一次定位。
8.一种基于显著特征的动态场景移动机器人定位系统,其特征在于,包括:
技术总结
本发明属于即时定位与地图构建技术领域,提供了一种基于显著特征的动态场景移动机器人定位方法及系统,首先,将动态场景分为多个固定区域和多个非固定区域并进行显著特征标记和权重赋予,赋予固定区域的权重高于赋予非固定区域的权重;然后,根据原始栅格地图和标记的显著特征,得到似然域地图,其中似然值按照对固定区域和非固定区域赋予权重进行加权调整;最后,根据移动机器人获得的激光点在所述似然域地图中的匹配,对移动机器人定位;通过标记动态场景下的显著特征来增加定位算法对变化场景中固定区域的置信度,降低对变化区域的置信度,从而加大固定特征对定位的贡献,减少非固定特征对定位的干扰,以达到提高定位稳定性的目的。
技术研发人员:欧金顺,李建强,孟广辉,李文广,任纪颖,高新彪
受保护的技术使用者:山东亚历山大智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!