一种三维形貌测量系统的制作方法
本发明涉及表面形貌测量,具体涉及一种三维形貌测量系统。
背景技术:
1、干涉测量是目前最精确的三维形貌测量技术之一,拥有非接触、无损、高精度测量的优势,在光学微透镜、ic载板、医学生物成像、刻蚀孔等领域有着广泛应用。传统的干涉测量技术通过直接判断条纹或其序号提取被测样品表面信息,但条纹判断易受多方面因素影响,使其精度只能达到λ/10~λ/20,目前主流的干涉测量包含以激光干涉为代表的定量相位成像和白光扫描干涉。
2、激光干涉测量形貌的方法精度高,但存在相位包裹问题,导致相邻两点的高度超过阈值会出现解算错误的情况,进而导致无法测量大尺寸物体的问题。白光干涉测量三维形貌的方法不受样品表面高度尺寸限制,但当被测样品表面高度为纳米级时,会导致解算误差太大,进而导致确定出的三维形貌精度较低。
3、因此,急需提供一种三维形貌测量系统,解决现有技术中存在的同一个三维形貌测量系统无法兼顾大尺寸物体的三维形貌测量以及测量精度的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种三维形貌测量系统,用以解决现有技术中存在的同一个三维形貌测量系统无法兼顾大尺寸物体的三维形貌测量以及测量精度的技术问题。
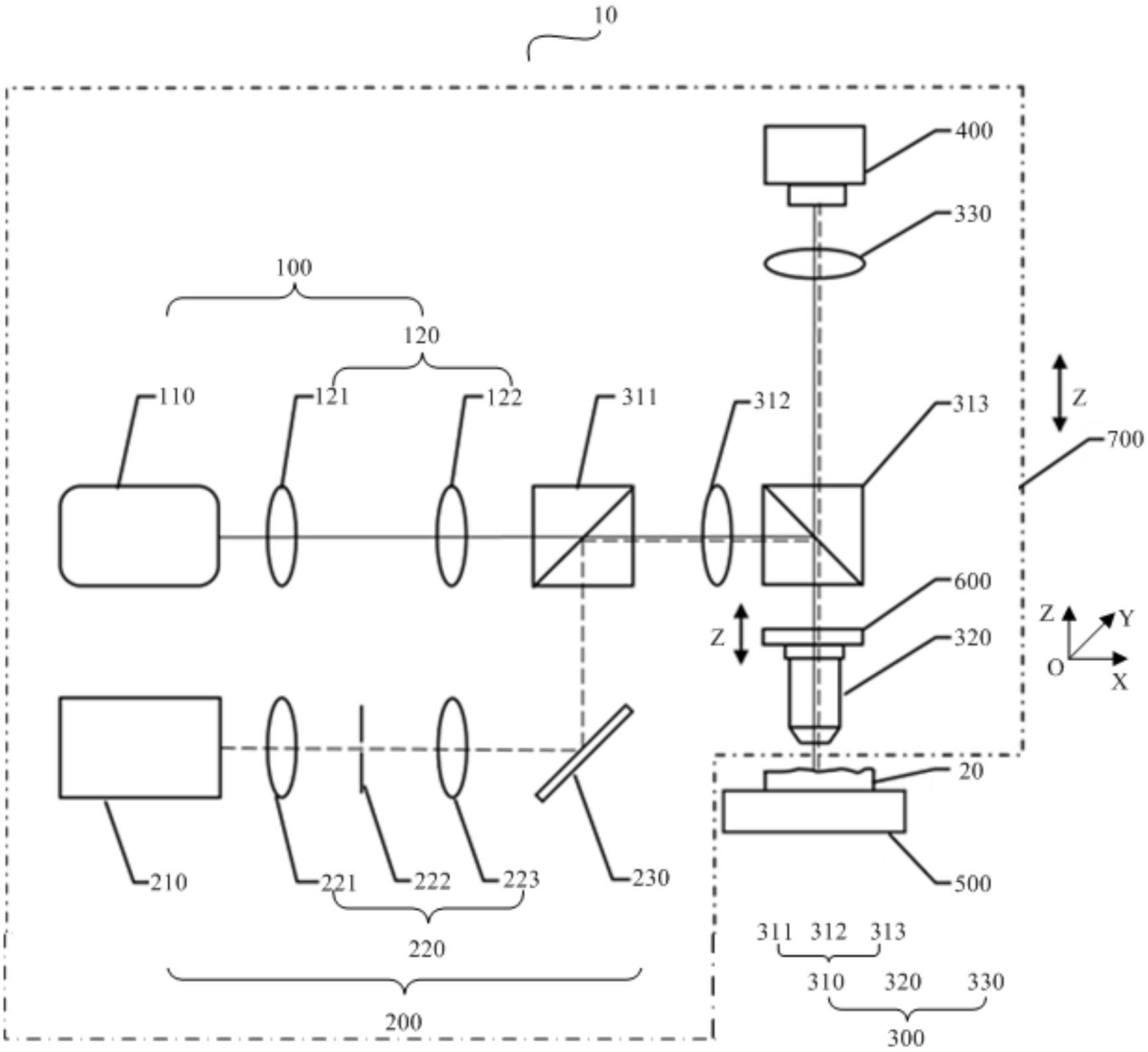
2、为了解决上述技术问题,本发明提供了一种三维形貌测量系统,包括白光模块、激光模块、显微干涉模块以及图像采集分析模块;
3、所述白光模块用于产生初始白光,并生成进入所述显微干涉模块的参考白光;
4、所述激光模块用于产生初始激光,并生成进入所述显微干涉模块的参考激光;
5、所述显微干涉模块用于将所述参考白光或所述参考激光传输至被测样品,并生成反射白光或反射激光,所述显微干涉模块还用于根据所述参考白光和所述反射白光生成干涉白光图像,并根据所述参考激光和所述反射激光生成干涉激光图像;
6、所述图像采集分析模块用于采集所述干涉白光图像或所述干涉激光图像,并根据所述干涉白光图像或所述干涉激光图像生成所述被测样品的三维形貌。
7、在一些可能的实现方式中,所述白光模块包括白光光源以及准直单元;
8、所述白光光源用于产生所述初始白光;
9、所述准直单元用于对所述初始白光进行准直处理,生成所述参考白光。
10、在一些可能的实现方式中,所述准直单元包括同轴布置的第一透镜和第二透镜。
11、在一些可能的实现方式中,所述激光模块包括激光光源、滤波单元以及反射镜;
12、所述激光光源用于产生所述初始激光;
13、所述滤波单元用于对所述初始激光进行滤波处理,生成所述参考激光;
14、所述反射镜用于改变所述参考激光的方向,使所述参考激光进入所述显微干涉模块。
15、在一些可能的实现方式中,所述滤波单元包括第三透镜、针孔以及第四透镜,所述针孔设置在所述第三透镜和所述第四透镜之间,且所述第三透镜和所述第四透镜同轴布置。
16、在一些可能的实现方式中,所述显微干涉模块包括光路改变单元、干涉物镜以及管镜,所述被测样品放置于所述干涉物镜下方;
17、所述光路改变单元用于改变所述参考白光或所述参考激光的光路,使所述参考白光或所述参考激光进入所述干涉物镜;
18、所述干涉物镜用于接收所述参考白光或所述参考激光,将所述参考白光或所述参考激光传输至所述被测样品,并对应生成反射白光或反射激光,所述干涉物镜还用于根据所述参考白光和所述反射白光生成干涉白光,并根据所述参考激光和所述反射激光生成干涉激光;
19、所述管镜用于将所述干涉白光或所述干涉激光进行汇聚,生成所述干涉白光图像或所述干涉激光图像。
20、在一些可能的实现方式中,所述光路改变单元包括第一分束器、第五透镜以及第二分束器,所述第五透镜设置于所述第一分束器和所述第二分束器之间,且所述第一分束器的反射面与所述第二分束器的反射面的夹角为90°。
21、在一些可能的实现方式中,所述三维形貌测量系统还包括用于承载所述被测样品的第一位移台,所述第一位移台可沿与所述干涉物镜的视野平面平行的平面移动。
22、在一些可能的实现方式中,所述三维形貌测量系统还包括与所述干涉物镜固定连接的第二位移台,所述第二位移台可沿靠近或远离所述被测样品的方向移动。
23、在一些可能的实现方式中,所述三维形貌测量系统还包括与所述白光模块、所述激光模块以及所述显微干涉模块固定连接的第三位移台,所述第三位移台可沿靠近或远离所述被测样品的方向移动,所述第三位移台的移动行程大于所述第二位移台的移动行程。
24、采用上述实施例的有益效果是:本发明提供的三维形貌测量系统,通过设置三维形貌测量系统包括白光模块和激光模块,可实现在同一个三维形貌测量系统中同时实现激光干涉测量形貌和白光干涉测量形貌,克服了激光干涉测量形貌无法测量大尺寸物体三维形貌的问题以及白光干涉测量形貌测量小尺寸物体时精度较低的问题,达到了同一个三维形貌测量系统既可实现微小物体的三维形貌高精度检测,也可实现大尺寸物体的三维形貌高精度检测的技术效果,即:可实现纳米至毫米结构器件的三维形貌高精度显微测量,提高了三维形貌测量系统的适用性。
技术特征:
1.一种三维形貌测量系统,其特征在于,包括白光模块、激光模块、显微干涉模块以及图像采集分析模块;
2.根据权利要求1所述的三维形貌测量系统,其特征在于,所述白光模块包括白光光源以及准直单元;
3.根据权利要求2所述的三维形貌测量系统,其特征在于,所述准直单元包括同轴布置的第一透镜和第二透镜。
4.根据权利要求1所述的三维形貌测量系统,其特征在于,所述激光模块包括激光光源、滤波单元以及反射镜;
5.根据权利要求4所述的三维形貌测量系统,其特征在于,所述滤波单元包括第三透镜、针孔以及第四透镜,所述针孔设置在所述第三透镜和所述第四透镜之间,且所述第三透镜和所述第四透镜同轴布置。
6.根据权利要求1所述的三维形貌测量系统,其特征在于,所述显微干涉模块包括光路改变单元、干涉物镜以及管镜,所述被测样品被放置于所述干涉物镜下方;
7.根据权利要求6所述的三维形貌测量系统,其特征在于,所述光路改变单元包括第一分束器、第五透镜以及第二分束器,所述第五透镜设置于所述第一分束器和所述第二分束器之间,且所述第一分束器的反射面与所述第二分束器的反射面的夹角为90°。
8.根据权利要求6所述的三维形貌测量系统,其特征在于,所述三维形貌测量系统还包括用于承载所述被测样品的第一位移台,所述第一位移台可沿与所述干涉物镜的视野平面平行的平面移动。
9.根据权利要求6所述的三维形貌测量系统,其特征在于,所述三维形貌测量系统还包括与所述干涉物镜固定连接的第二位移台,所述第二位移台可沿靠近或远离所述被测样品的方向移动。
10.根据权利要求9所述的三维形貌测量系统,其特征在于,所述三维形貌测量系统还包括与所述白光模块、所述激光模块以及所述显微干涉模块固定连接的第三位移台,所述第三位移台可沿靠近或远离所述被测样品的方向移动,所述第三位移台的移动行程大于所述第二位移台的移动行程。
技术总结
本发明提供了一种三维形貌测量系统,包括白光模块、激光模块、显微干涉模块以及图像采集分析模块;白光模块用于产生初始白光,并生成进入显微干涉模块的参考白光;激光模块用于产生初始激光,并生成进入显微干涉模块的参考激光;显微干涉模块用于将参考白光或参考激光传输至被测样品,并生成反射白光或反射激光,显微干涉模块还用于根据参考白光和反射白光生成干涉白光图像,并根据参考激光和反射激光生成干涉激光图像;图像采集分析模块用于采集干涉白光图像或干涉激光图像,并根据干涉白光图像或干涉激光图像生成被测样品的三维形貌。本发明可实现纳米至毫米结构器件的三维形貌高精度显微测量,提高了三维形貌测量系统的适用性。
技术研发人员:吴征宇,祝仁龙,谢怡君
受保护的技术使用者:板石智能科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!