感知目标运动信息的确定方法、装置、设备及存储介质
本发明涉及辅助驾驶,尤其涉及一种感知目标运动信息的确定方法、装置、电子设备及存储介质。
背景技术:
1、目前,车辆的驾驶辅助系统通常包括一个前向摄像头、一个前向雷达以及四个角雷达。其中,前向摄像头可以实现前向车辆、车道线等交通目标的识别,前向雷达可以对前向交通目标的运动信息进行感知,四个角雷达的感知范围可以覆盖车辆的侧向和后向,用于感知车辆侧向和后向的交通目标的运动信息。将多传感器的感知信息进行信息融合可以实现驾驶辅助功能。
2、为了实现可靠的感知信息获取,相邻两个雷达的感知范围存在重合部分,对于重合区域的感知目标的运动信息,现有技术通常将两个雷达获取的运动信息计算平均值,利用平均值更新感知目标的运动信息。但是,重合区域内感知目标的运动容易发生突变,例如感知目标的运动方向改变,由于雷达在重合区域内各位置的感知精度不同,现有方案感知目标的运动信息确定方式难以保证感知目标运动信息的准确性,容易造成感知目标运动信息的精准度丢失。
技术实现思路
1、本发明提供了一种感知目标运动信息的确定方法、装置、设备及存储介质,以解决感知目标的运动信息在传感器感知重合区域准确性差的问题,可以保证传感器感知重合区域内感知目标的运动信息精确度,提高辅助驾驶安全性和可靠性。
2、根据本发明的一方面,提供了一种感知目标运动信息的确定方法,所述方法包括:
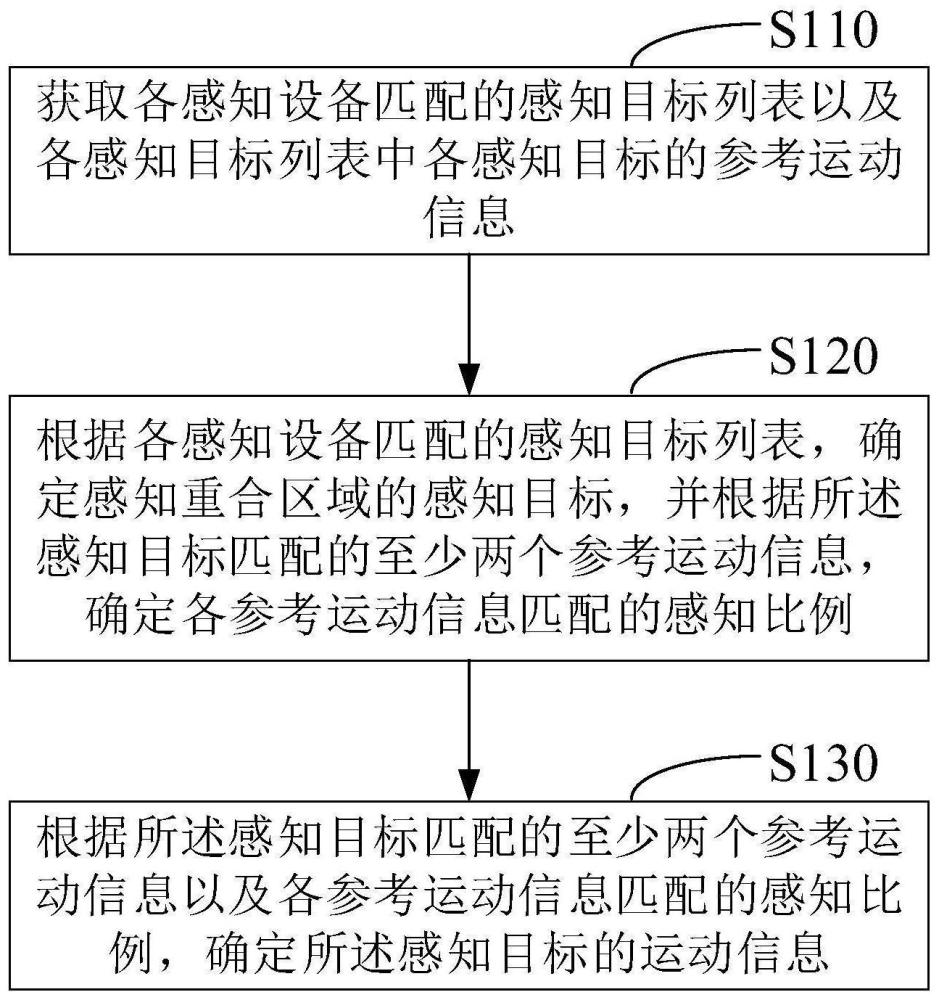
3、获取各感知设备匹配的感知目标列表以及各感知目标列表中各感知目标的参考运动信息;
4、根据各感知设备匹配的感知目标列表,确定感知重合区域的感知目标,并根据所述感知目标匹配的至少两个参考运动信息,确定各参考运动信息匹配的感知比例;
5、根据所述感知目标匹配的至少两个参考运动信息以及各参考运动信息匹配的感知比例,确定所述感知目标的运动信息。
6、根据本发明的另一方面,提供了一种感知目标运动信息的确定装置,该装置包括:
7、参考信息获取模块,用于获取各感知设备匹配的感知目标列表以及各感知目标列表中各感知目标的参考运动信息;
8、感知比例确定模块,用于根据各感知设备匹配的感知目标列表,确定感知重合区域的感知目标,并根据所述感知目标匹配的至少两个参考运动信息,确定各参考运动信息匹配的感知比例;
9、运动信息确定模块,用于根据所述感知目标匹配的至少两个参考运动信息以及各参考运动信息匹配的感知比例,确定所述感知目标的运动信息。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的感知目标运动信息的确定方法。
14、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的感知目标运动信息的确定方法。
15、本发明实施例的技术方案,通过获取各感知设备匹配的感知目标列表以及各感知目标列表中各感知目标的参考运动信息;根据各感知设备匹配的感知目标列表,确定感知重合区域的感知目标,并根据所述感知目标匹配的至少两个参考运动信息,确定各参考运动信息匹配的感知比例;根据所述感知目标匹配的至少两个参考运动信息以及各参考运动信息匹配的感知比例,确定所述感知目标的运动信息。该技术方案解决了感知目标的运动信息在传感器感知重合区域准确性差的问题,可以保证传感器感知重合区域内感知目标的运动信息精确度,提高辅助驾驶安全性和可靠性。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种感知目标运动信息的确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据各感知设备匹配的感知目标列表,确定感知重合区域的感知目标,包括:
3.根据权利要求2所述的方法,其特征在于,所述参考运动信息包括感知目标的位置信息;
4.根据权利要求3所述的方法,其特征在于,所述位置评估结果包括角度评估指标;
5.根据权利要求3所述的方法,其特征在于,所述位置评估结果还包括距离评估指标;
6.根据权利要求3所述的方法,其特征在于,所述位置评估结果包括角度评估指标和距离评估指标;
7.根据权利要求1所述的方法,其特征在于,所述感知目标列表中感知目标是基于感知目标与感知设备的距离排列的。
8.一种感知目标运动信息的确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的感知目标运动信息的确定方法。
技术总结
本发明公开了一种感知目标运动信息的确定方法、装置、设备及存储介质。该方法包括:获取各感知设备匹配的感知目标列表以及各感知目标列表中各感知目标的参考运动信息;根据各感知设备匹配的感知目标列表,确定感知重合区域的感知目标,并根据所述感知目标匹配的至少两个参考运动信息,确定各参考运动信息匹配的感知比例;根据所述感知目标匹配的至少两个参考运动信息以及各参考运动信息匹配的感知比例,确定所述感知目标的运动信息。本技术方案解决了感知目标的运动信息在传感器感知重合区域准确性差的问题,可以保证传感器感知重合区域内感知目标的运动信息精确度,提高辅助驾驶安全性和可靠性。
技术研发人员:范春晖,王一博,李美洲,黄涛,倪洪飞,戴一凡
受保护的技术使用者:清华大学苏州汽车研究院(吴江)
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!