基于一体化平台的海底控制点三维坐标标定方法与流程
本发明公开了基于一体化平台的海底控制点三维坐标标定方法,属于导航。
背景技术:
1、海底大地基准网同陆地基准网一样是国家空间基准的重要组成部分,获取高精度的海底控制点的三维坐标是海底大地基准网建设的核心目标。确定海底控制点通常采用gnss定位和水声声学测距相结合的方式,通过gnss接收机和声学换能器对海底控制点上的声学应答器进行测量。声学换能器的位置由gnss天线位置通过臂长参数和姿态信息计算得到,而臂长参数本身的误差会影响到海底控制点的定位精度,由于臂长参数很难精确测定,传统方法中会将臂长参数归入数学模型和海底控制点的三维坐标一同解算。但由于船体行进时相对平稳使得姿态传感器的横滚角和俯仰角的值过小从而导致方程病态。所以需要一种既能顾及臂长参数又能提高方程可解性的海底控制点标定方法。
技术实现思路
1、本发明公开了基于一体化平台的海底控制点三维坐标标定方法,以解决现有技术中,测量船在进行航行测量时船体比较平稳,使姿态传感器得到的横滚角和俯仰角比较小,从而导致设计矩阵和的第三项强相关导致方程病态的问题。
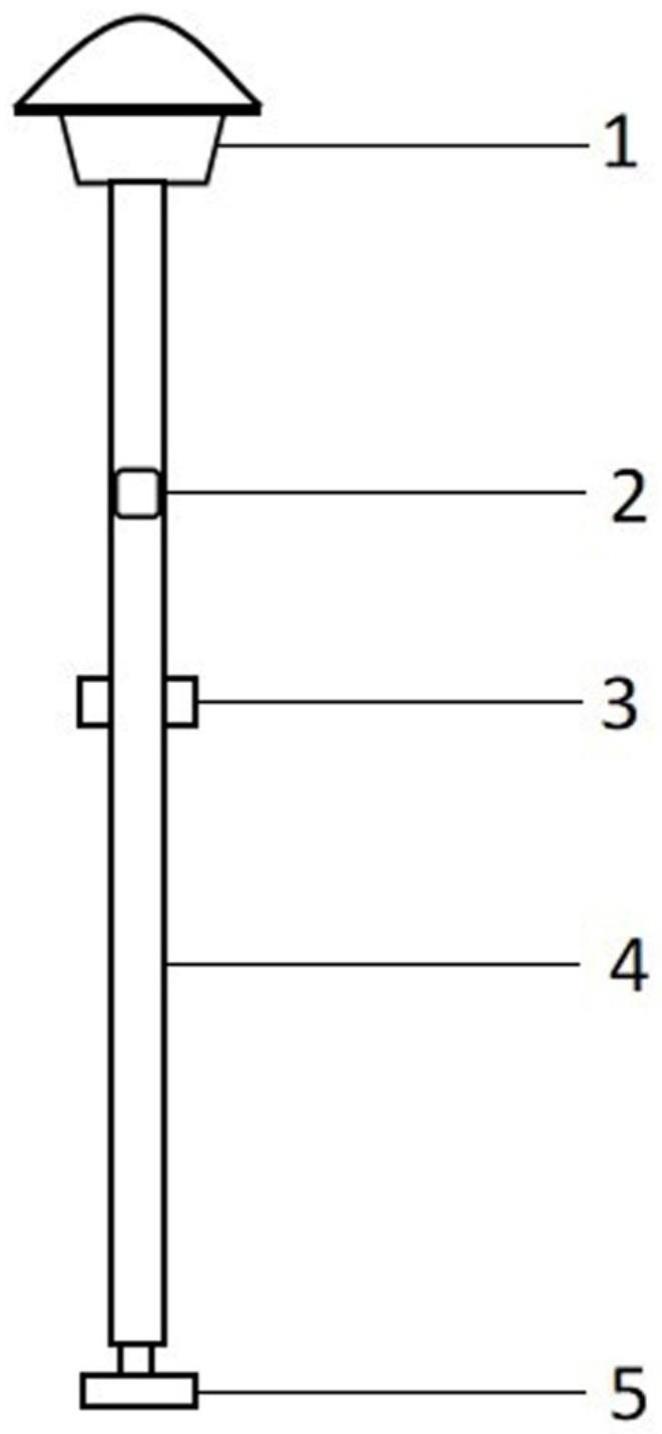
2、基于一体化平台的海底控制点三维坐标标定方法,一体化平台包括臂杆,所述臂杆上搭载gnss天线、姿态传感器、水声换能器、电力供应系统,防水防潮系统、数据传输系统和摇摆系统;
3、一体化平台固定在船侧,借助摇摆系统以一定的角度进行摆动,电力供应系统具备接口,用于接收来自船体的电力供应,防水防潮系统保护臂杆上的设备,数据传输系统将gnss接收机和海底应答器接收的数据传入数据处理中心;
4、三维坐标标定包括:
5、s1.测定臂长参数的初始值;
6、s2.gnss天线提供gnss天线位置信息;
7、s3.姿态传感器提供臂杆实时的姿态信息;
8、s4.在船进行圆走航时,处于臂杆底端的水声换能器以指定周期对海底应答器进行信号传递,利用距离交会的方法完成对海底控制点的三维坐标进行标定。
9、s3包括:
10、s3.1.设姿态传感器的方位为h、俯仰角为p、横滚角为r;
11、s3.2.计算一体化平台坐标系到大地坐标系的变化矩阵:
12、;
13、其中,分别为方向、俯仰、横滚三个轴的旋转矩阵,
14、。
15、s4包括:
16、s4.1.由臂长参数、s2得到的gnss天线位置信息和s3得到的旋转矩阵r,求得第i个历元水声换能器的位置信息:
17、;
18、其中,为第i个历元水声换能器的位置信息,为s3得到的gnss天线位置信息,为臂长参数;
19、s4.2.一体化平台的定位模型表示式为:
20、;
21、其中,为第i个历元水声换能器到海底应答器之间的几何距离,为海底应答器的三维坐标,为第i个历元水声换能器的三维坐标,为系统误差,为第i个历元的随机误差,为关于和的函数。
22、s4包括:
23、s4.3.将定位模型表示式在海底应答器三维坐标初始值和臂长参数的初始值处线性展开:
24、;
25、其中,
26、,
27、,和为两个待定参数;
28、s4.4.将海底应答器三维坐标和臂长参数一同解算,列误差方程为:
29、;
30、其中,为改正数,为已知向量,,
31、待解参数的估值为:,其中,,,。
32、与现有技术相比,本发明的有益效果为:本发明将载有gnss天线和换能器的平台以指定的角度摇摆起来,摇摆模型可以有效提高横滚角或俯仰角的变化范围,从而解决方程的病态问题,既能考虑臂长参数误差带来的定位误差的影响也可以增加方程的可解性。
技术特征:
1.基于一体化平台的海底控制点三维坐标标定方法,其特征在于,一体化平台包括臂杆(4),所述臂杆上搭载gnss天线(1)、姿态传感器(2)、水声换能器(5)、电力供应系统,防水防潮系统、数据传输系统和摇摆系统(3);
2.根据权利要求1所述的基于一体化平台的海底控制点三维坐标标定方法,其特征在于,s3包括:
3.根据权利要求2所述的基于一体化平台的海底控制点三维坐标标定方法,其特征在于,s4包括:
4.根据权利要求3所述的基于一体化平台的海底控制点三维坐标标定方法,其特征在于,s4包括:
技术总结
本发明公开了基于一体化平台的海底控制点三维坐标标定方法,属于导航技术领域,用于海底控制点三维坐标标定,三维坐标标定包括:测定臂长参数的初始值,GNSS天线提供GNSS天线位置信息,姿态传感器提供臂杆实时的姿态信息,在船进行圆走航时,处于臂杆底端的水声换能器以指定周期对海底应答器进行信号传递,利用距离交会的方法完成对海底控制点的三维坐标进行标定。本发明将载有GNSS天线和换能器的平台以指定的角度摇摆起来,摇摆模型可以有效提高横滚角或俯仰角的变化范围,从而解决方程的病态问题,既能考虑臂长参数误差带来的定位误差的影响也可以增加方程的可解性。
技术研发人员:薛树强,甄杰,李忱汉,柯宝贵,王虎,董杰
受保护的技术使用者:中国测绘科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!