基于LCMV准则的MIMO雷达空-时-距三维联合自适应检测方法
本发明属于雷达信号处理领域,特别涉及mimo雷达信号处理与目标检测技术。
背景技术:
1、雷达面临的工作环境日益复杂,复杂的背景杂波和目标特性使得雷达目标检测的难度越来越大,这对雷达信号处理及目标检测技术提出了更高的要求。mimo雷达作为一种具有波形分集特性的新体制雷达,具有更高的自由度和空间分辨能力,能够在更高维度区分目标和杂波背景,从而提高目标检测性能。然而,mimo雷达传统的级联处理方法存在波形难以有效分离、数据需求量高、算法运算量大、低信杂噪比背景下检测性能不佳等问题。因此,亟需发展与mimo雷达相匹配的信号处理与目标检测方法。
2、为了解决上述问题,本发明提供了一种基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法。
技术实现思路
1、本发明的目的在于,针对mimo雷达传统的级联处理方法存在波形难以有效分离、数据需求量高、算法运算量大、低信杂噪比背景下检测性能不佳等问题,提供一种基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其中要解决的技术问题包括:
2、(1)波形的有效分离问题;
3、(2)旁瓣抑制问题;
4、(3)杂波抑制问题;
5、(4)降低数据的需求量问题;
6、(5)减少运算量和提高运行速度问题。
7、本发明所述的基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其特征在于包括以下技术措施:
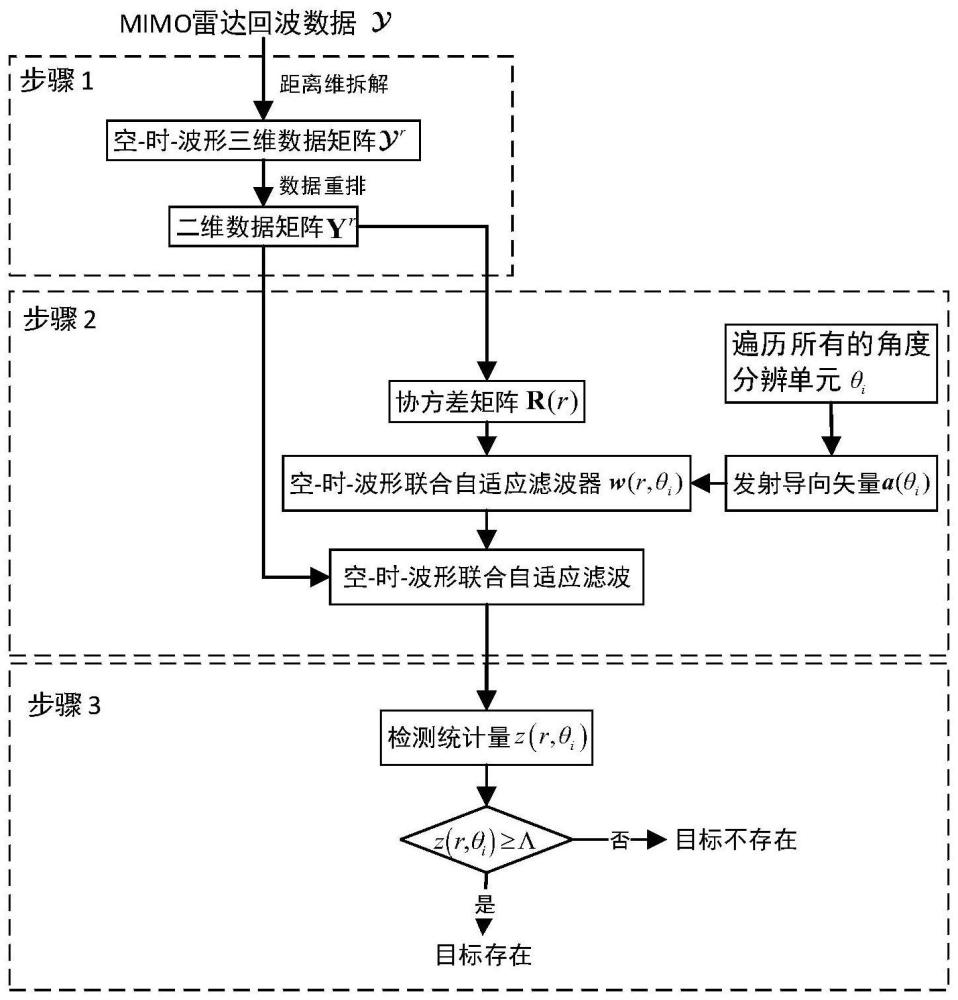
8、步骤一:接收到mimo雷达的阵元-脉冲-距离(分别对应空-时-距)三维回波数据,并将该空-时-距三维回波数据,按照波形长度拆解为多个“空-时-波形”三维数据矩阵,然后将每个三维数据矩阵都转换为二维数据矩阵,作为联合自适应处理的输入;
9、步骤二:基于lcmv准则构建联合自适应滤波器,并对二维数据矩阵进行联合自适应滤波处理;
10、步骤三:用联合自适应滤波处理输出的结果作为检测统计量,实施过门限检测。
11、与传统的级联处理方法(即,“匹配滤波+波束形成+多普勒域检测”处理)相比,本发明所述的基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,有益效果在于:
12、(1)本方法解决了传统级联处理方法中,强回波点易产生高的三维旁瓣的问题,避免了对邻近微弱目标的遮挡。
13、(2)本方法采用基于lcmv准则的三维联合处理方式,在抑制杂波的同时具有较快的处理速度,便于工程实现。
技术特征:
1.基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其特征在于,所述步骤s1具体包括:
3.根据权利要求1所述的基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其特征在于,所述步骤s2具体包括:
4.根据权利要求1所述的基于lcmv准则的mimo雷达空-时-距三维联合自适应检测方法,其特征在于,所述步骤s3具体包括:
技术总结
本发明涉及一种基于LCMV准则的MIMO雷达空‑时‑距三维联合自适应检测方法。本发明先将接收到的MIMO雷达阵元‑脉冲‑距离三维回波数据,按照波形长度拆解为多个“空‑时‑波形”三维数据矩阵,然后将每个三维数据矩阵都转换为二维数据矩阵,作为联合自适应处理的输入;接着,基于LCMV准则构建联合自适应滤波器,并对二维数据矩阵进行联合自适应滤波处理;最后,用联合自适应滤波处理输出的结果作为检测统计量,实施过门限检测。与“匹配滤波+波束形成+多普勒域检测”的传统级联处理方法相比,本发明能够抑制强目标产生的旁瓣,避免了对邻近微弱目标的遮挡,能够抑制杂波,能够降低数据的需求量,具有较快的运算速度,因而具有便于工程实现的优点。
技术研发人员:黄勇,关键,董云龙,何友,刘宁波,孙艳丽,牟效乾,丁昊
受保护的技术使用者:中国人民解放军海军航空大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!