智能体导航方法、服务器及计算机可读存储介质与流程
本申请涉及人工智能,尤其涉及一种智能体导航方法、服务器及计算机可读存储介质。
背景技术:
1、随着人工智能(artificial intelligence,ai)技术的快速发展,人工智能技术被广泛应用于3d游戏、虚拟交通、自动驾驶仿真、机器人轨迹规划等各个领域,在3d虚拟空间中进行ai仿真具有非常大的商业价值。目前,虚拟3d环境下的智能体导航方法是使用导航网格,导航网格将地图划分为一组凸区域,每个区域之间可以被点对点导航,然而以导航网格算法实现的智能体导航难以在复杂多变的动态3d环境下拥有灵活、多样化的高质量表现,导航成功率不高。
2、因此,如何提高智能体导航的可靠性成为亟需解决的问题。
技术实现思路
1、本申请实施例提供一种智能体导航方法、服务器及计算机可读存储介质,可以实现提高智能体导航的可靠性。
2、第一方面,本申请实施例提供了一种智能体导航方法,包括:
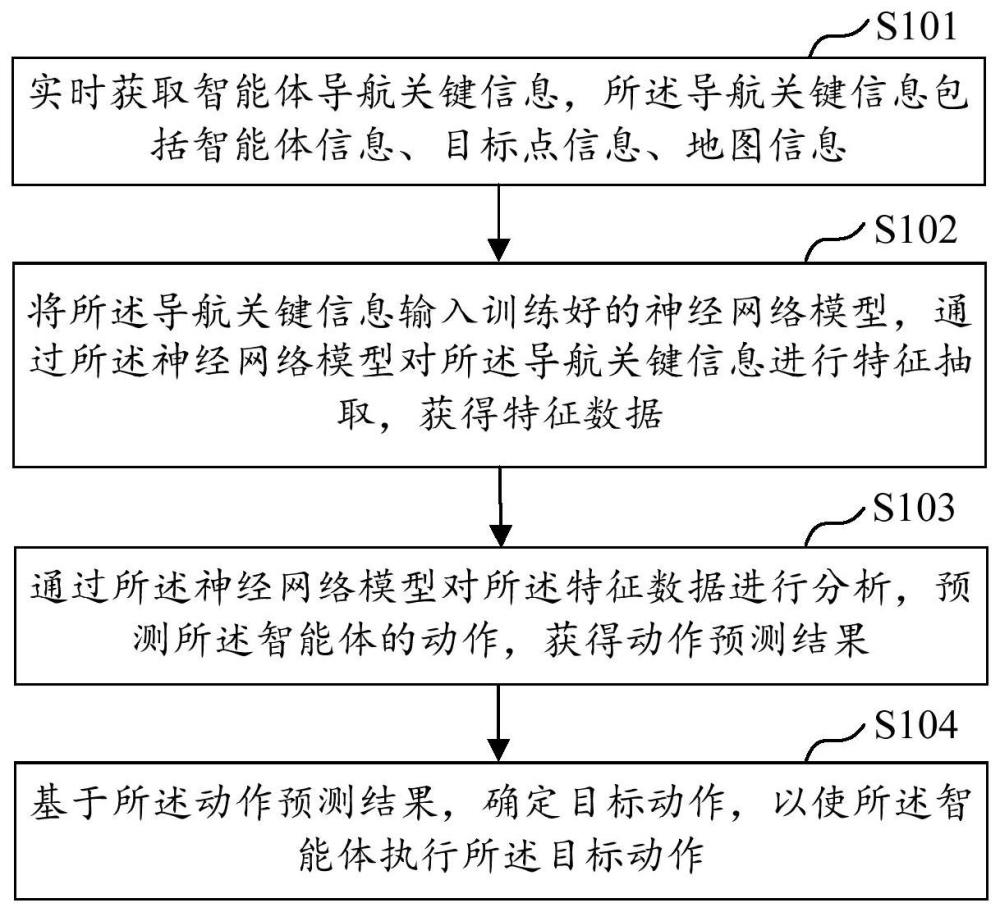
3、实时获取智能体导航关键信息,所述导航关键信息包括智能体信息、目标点信息、地图信息;
4、将所述导航关键信息输入训练好的神经网络模型,通过所述神经网络模型对所述导航关键信息进行特征抽取,获得特征数据;
5、通过所述神经网络模型对所述特征数据进行分析,预测所述智能体的动作,获得动作预测结果;
6、基于所述动作预测结果,确定目标动作,以使所述智能体执行所述目标动作。
7、第二方面,本申请实施例还提供了一种服务器,其特征在于,所述服务器包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如上述的智能体导航方法。
8、第三方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述的智能体导航方法。
9、本申请实施例提供了一种智能体导航方法、服务器及计算机可读存储介质,通过实时获取智能体导航关键信息,导航关键信息包括智能体信息、目标点信息、地图信息,将导航关键信息输入训练好的神经网络模型,通过神经网络模型对所述导航关键信息进行特征抽取,获得特征数据,通过神经网络模型对特征数据进行分析,预测智能体的动作,获得动作预测结果,基于动作预测结果,确定目标动作,以使智能体执行目标动作,相比于以导航网格算法实现的智能体导航,增加了在复杂3d环境中智能体的导航能力,也即,提高了智能体导航的可靠性。
技术特征:
1.一种智能体导航方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述智能体信息包括智能体当前帧信息和智能体上一帧移动信息,所述智能体当前帧信息包括智能体当前帧视角、智能体当前帧姿态,所述智能体上一帧移动信息包括智能体上一帧移动方向、智能体上一帧移动结果、智能体上一帧与当前帧的移动位置差、智能体上一帧与当前帧的移动角度差、智能体上一帧与当前帧的移动距离,所述目标点信息包括目标点相对于所述智能体的相对位置、所述目标点相对于所述智能体的相对角度、所述目标点与所述智能体之间的距离,所述地图信息包括深度图、切片图、时序图。
3.根据权利要求1所述的方法,其特征在于,所述动作预测结果包括至少一个动作的动作类型以及每个动作对应的预测概率,其中,所述动作类型包括非法动作类型和合法动作类型。
4.根据权利要求3所述的方法,其特征在于,所述基于所述动作预测结果,确定目标动作,包括:
5.根据权利要求4所述的方法,其特征在于,所述获得每个动作对应的所述预测概率,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述获取智能体导航关键信息之前,包括:
7.根据权利要求6所述的方法,其特征在于,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,所述方法还包括:
10.根据权利要求6所述的方法,其特征在于,所述方法还包括:
11.一种服务器,其特征在于,所述服务器包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求1至10中任一项所述的智能体导航方法。
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现如权利要求1至10中任一项所述的智能体导航方法。
技术总结
本申请公开了一种智能体导航方法、服务器及计算机可读存储介质,该方法包括:实时获取智能体导航关键信息,所述导航关键信息包括智能体信息、目标点信息、地图信息;将所述导航关键信息输入训练好的神经网络模型,通过所述神经网络模型对所述导航关键信息进行特征抽取,获得特征数据;通过所述神经网络模型对所述特征数据进行分析,预测所述智能体的动作,获得动作预测结果;基于所述动作预测结果,确定目标动作,以使所述智能体执行所述目标动作。本申请实施例实现了提高智能体导航的可靠性。
技术研发人员:叶宇含,张黎,邱斌,李青洲,吴卿源,杨木,梁敏明
受保护的技术使用者:深圳海普参数科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!