一种基于Cortex-M3的毫米波雷达测距信号处理系统
本发明属于数字集成电路领域,具体涉及一种基于cortex-m3的毫米波雷达测距信号处理系统。
背景技术:
1、对特定目标距离和位移的精确测量在实际的工业生产中有着广泛的应用,例如运动轨迹监测、液面高度测量、建筑物安全监测、物体平坦度检测和形变检测等。传统的测距方式一般是由工作人员操作测距工具进行读数和记录,这种测距方式的主要优点是成本较低,但不足是测距结果很容易受到操作人员和测量环境的影响。
2、为了解决操作人员和测量环境对测距结果的影响,人们开发了传统雷达测距系统,但传统雷达测距系统具有集成度低、价格昂贵、精确度低和可视化程度低的缺陷。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于cortex-m3的毫米波雷达测距信号处理系统。本发明要解决的技术问题通过以下技术方案实现:
2、一种基于cortex-m3的毫米波雷达测距信号处理系统,包括:
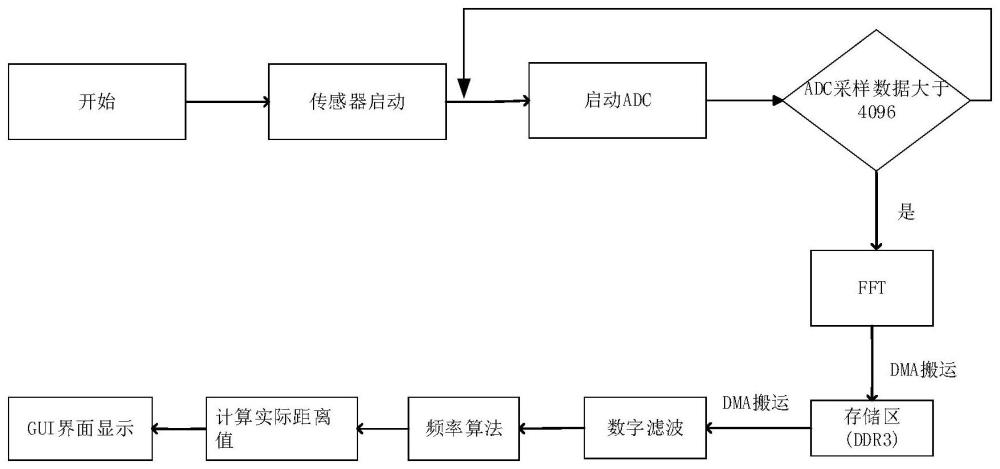
3、adc采样模块、fft硬件加速模块、dma+ddr数据调度模块、数字滤波模块、频率算法模块、距离计算模块、gui显示界面模块和cortex-m3内核;其中,
4、所述adc采样模块包括:传感器和adc;所述adc用于对所述传感器得到的数据进行采样并转换成数字信号输出;
5、所述fft硬件加速模块用于对所述数字信号进行快速傅里叶变换并输出;
6、所述dma+ddr数据调度模块包括:数据缓存模块、数据调度模块、数据组包模块;所述dma+ddr数据调度模块采用多组dma内存轮流使用的方法,将所述fft硬件加速模块输出的多个不同的信号,存储到所述数据缓存模块内各自对应的ddr通道中,所述数据调度模块根据预设的仲裁原则确定优先级,按照所述优先级依次将ddr通道中的数据发送至所述数据组包模块,所述数据组包模块在所述cortex-m3内核的控制下,对接收的数据进行处理,并发送至所述数字滤波模块。
7、所述数字滤波模块用于对收到的数据进行滤波处理并输出;
8、所述频率算法模块用于对所述数字滤波模块输出的信号进行离散时间傅里叶变换dtft和网络线性调频z变换,以实现频谱细化的目的并输出;
9、所述距离计算模块用于根据所述频率算法模块输出的结果计算出所述传感器和待测目标的实际距离值l;
10、所述gui显示界面模块用于根据所述系统的设置,通过图形化和数字化显示所述实际距离值l;
11、所述cortex-m3内核搭载amba3.0总线系统,支持地址数据对齐访问、多个主设备并行访问不同从机、睡眠模式;所述cortex-m3内核用于对所述系统的各个模块进行控制。
12、在本发明的一个实施例中,传感器为毫米波雷达,所述毫米波雷达通过发送毫米波,检测到回波之后,经过所述毫米波雷达处理生成拍频信号,并将所述拍频信号作为传感器得到的数据,提供给所述adc采样模块进行采样。
13、在本发明的一个实施例中,数据调度模块根据预设的仲裁原则确定优先级,按照所述优先级依次将ddr通道中的数据发送至所述数据组包模块,包括:
14、当同一时刻有两个及以上ddr通道同时发起数据传输时,所述数据调度模块中的全局寄存器prctrl的信号为低电平,所述预设的仲裁原则为:所有等待数据传输的ddr通道按通道位号从小到大的优先级,依次占用总线,并将ddr通道中的数据发送给所述数据组包模块。
15、在本发明的一个实施例中,数据组包模块在所述cortex-m3内核的控制下,对接收的数据进行处理,并发送至所述数字滤波模块,包括:
16、所述数据组包模块将接收到的数据,组包形成总线接口形式,发送至所述cortex-m3内核,所述cortex-m3内核将收到的数据进行处理,并输出雷达数据接口信息;所述cortex-m3内核控制所述数据组包模块根据所述雷达数据接口信息解析出有效数据,并将所述有效数据发送至所述数字滤波模块。
17、在本发明的一个实施例中,雷达数据接口信息包括:
18、数据的采样时钟、待传输的数据、数据的有效标识、数据的起始标识和数据的结束标识。
19、在本发明的一个实施例中,数字滤波模块包括:减法器、除法器、零点系数x(n)延时网络生成模块和极点系数y(n)延时网络生成模块;其中,
20、所述减法器的第一输入端接入所述零点系数x(n)延时网络生成模块的输出端,所述减法器的第二输入端接入所述极点系数y(n)延时网络生成模块的输出端,所述减法器的输出端与所述除法器的输入端连接;
21、所述除法器的输出端与所述数字滤波模块的输出端连接,所述除法器的输出端还与所述减法器的第二输入端连接,构成反馈结构。
22、在本发明的一个实施例中,快速傅里叶变换的工作过程包括:
23、对所述数字信号根据fft频谱找到频谱峰处所对应的频率值fmax,确定细化频率起点fmax-m1、细化频率终点fmax+m1、细化频段的频点数d1和细化精度。
24、在本发明的一个实施例中,频率算法模块的工作过程包括:
25、所述频率算法模块对所述数字滤波模块输出的数据,通过离散时间傅里叶变换dtft进行优化,得到优化后的细化频率起点fmax-m、细化频率终点fmax+m、细化频段的频点数d和细化精度,作为优化结果;对所述优化结果进行网络线性调频z变换,得到细化后的频谱;所述细化后的频谱中幅度峰值点对应的频率值作为最终的频率估计值fb。
26、在本发明的一个实施例中,距离计算模块的工作过程包括:
27、所述距离计算模块根据所述最终的频率估计值fb计算所述传感器和待测目标的实际距离值l;其中:
28、
29、其中,fb为所述最终的频率估计值,t为调频周期,b为信号调制带宽,c为电磁波速度。
30、本发明的有益效果:
31、本发明实施例通过引入fft硬件加速模块和频率算法模块,实现了fft_dtft_czt改进算法的硬件化,对系统的测距精度有着明显的提高,且提高了系统的集成度。本发明实施例还设计了gui界面,通过图形化和数字化显示来提高用户体验,增加了可视化程度,这不仅能降低系统整体的开发成本,还让本发明实施例拥有很好的应用价值和市场前景;通过搭载cortex-m3内核和dma,能够实现低功耗、高吞吐的目的,采用的cortex-m3内核的价格低廉,也降低了成本。
技术特征:
1.一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,包括:
2.根据权利要求1所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述传感器为毫米波雷达,所述毫米波雷达通过发送毫米波,检测到回波之后,经过所述毫米波雷达处理生成拍频信号,并将所述拍频信号作为传感器得到的数据,提供给所述adc采样模块进行采样。
3.根据权利要求1所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述数据调度模块根据预设的仲裁原则确定优先级,按照所述优先级依次将ddr通道中的数据发送至所述数据组包模块,包括:
4.根据权利要求1所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述数据组包模块在所述cortex-m3内核的控制下,对接收的数据进行处理,并发送至所述数字滤波模块,包括:
5.根据权利要求4所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述雷达数据接口信息包括:
6.根据权利要求1所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述数字滤波模块包括:减法器、除法器、零点系数x(n)延时网络生成模块和极点系数y(n)延时网络生成模块;其中,
7.根据权利要求1所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述快速傅里叶变换的工作过程包括:
8.根据权利要求7所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述频率算法模块的工作过程包括:
9.根据权利要求8所述的一种基于cortex-m3的毫米波雷达测距信号处理系统,其特征在于,所述距离计算模块的工作过程包括:
技术总结
本发明公开了一种基于Cortex‑M3的毫米波雷达测距信号处理系统,包括:ADC采样模块、FFT硬件加速模块、DMA+DDR数据调度模块、数字滤波模块、频率算法模块、距离计算模块、GUI显示界面模块和Cortex‑M3内核;本发明通过引入FFT硬件加速模块和频率算法模块,实现了FFT_DTFT_CZT改进算法的硬件化,对系统的测距精度有着明显的提高,且提高了系统的集成度。本发明还设计了GUI界面,通过图形化和数字化显示来提高用户体验,增加了可视化程度,这不仅能降低系统整体的开发成本,还让本发明拥有很好的应用价值和市场前景;通过搭载Cortex‑M3内核和DMA,能够实现低功耗、高吞吐的目的,采用的Cortex‑M3内核的价格低廉,也降低了成本。
技术研发人员:朱家鑫,张野,田冀楠,陶文
受保护的技术使用者:西安电子科技大学芜湖研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!