本申请实施例涉及机器人领域,具体而言,涉及一种构建栅格地图的方法及存储介质、水池机器人。
背景技术:
1、现有水池中的机器人(例如,水池中的清洁机器人)大多运动路径极不规则,通过使用惯导定位的方式进行移动,容易受到打滑、水流冲击等因素的影响,定位精度较差,容易出现定位异常,运行效率低。
2、针对相关技术中存在难以在水中精确建图的问题,尚未提出有效的解决方案。
技术实现思路
1、本申请实施例提供了一种构建栅格地图的方法及存储介质、水池机器人,以至少解决相关技术中存在难以在水中精确建图的问题。
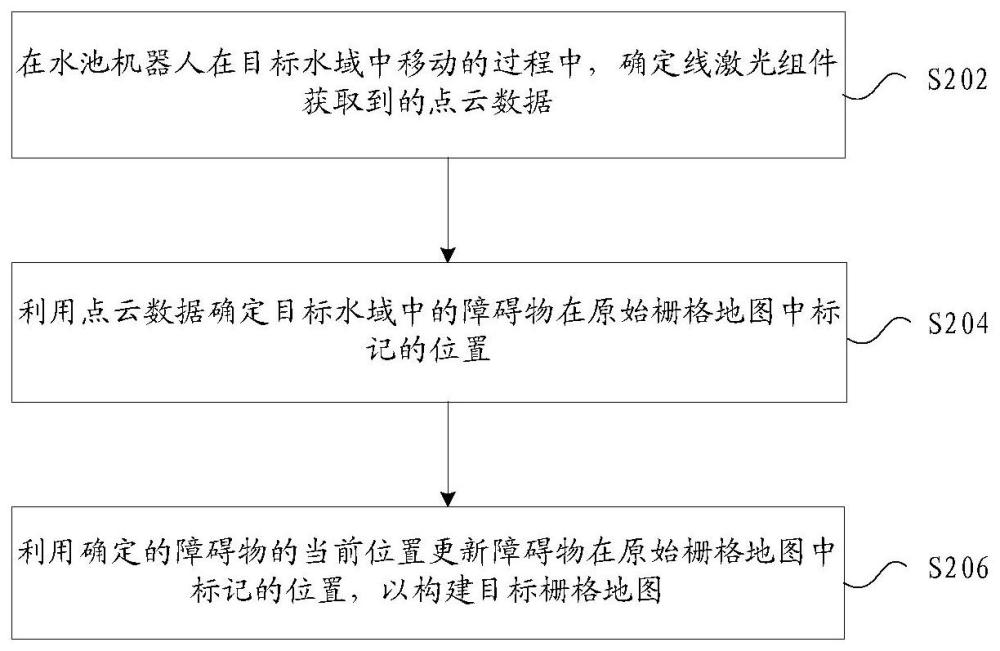
2、根据本申请的一个实施例,提供了一种构建栅格地图的方法,包括:在水池机器人在目标水域中移动的过程中,确定线激光组件获取到的点云数据,其中,上述线激光组件设置在上述水池机器人的一侧;利用上述点云数据确定上述目标水域中的障碍物在原始栅格地图中标记的位置;利用确定的上述障碍物的当前位置更新上述障碍物在上述原始栅格地图中标记的位置,以构建目标栅格地图。
3、根据本申请的另一个实施例,提供了一种构建栅格地图的装置,包括:第一确定模块,用于在水池机器人在目标水域中移动的过程中,确定线激光组件获取到的点云数据,其中,上述线激光组件设置在上述水池机器人的一侧;第二确定模块,用于利用上述点云数据确定上述目标水域中的障碍物在原始栅格地图中标记的位置;第一构建模块,用于利用确定的上述障碍物的当前位置更新上述障碍物在上述原始栅格地图中标记的位置,以构建目标栅格地图。
4、在一个示例性实施例中,上述第一确定模块,包括:第一获取单元,用于在上述水池机器人在上述目标水域中沿边移动的过程中,通过单线激光传感器获取横向排列的多个点数据,得到点云数据。
5、在一个示例性实施例中,上述第二确定模块,包括:第一确定单元,用于确定上述原始栅格地图中的栅格被上述点云数据中的多个点数据占用的占用概率值,得到占用概率值集合;第二确定单元,用于利用上述占用概率值集合确定上述障碍物在上述原始栅格地图的栅格中的位置,并对栅格位置进行标记。
6、在一个示例性实施例中,第一确定单元,包括:第一转换子单元,用于将上述点云数据转换至世界坐标系中,并确定每个上述点数据在上述世界坐标系中的三维坐标;第一标记子单元,用于将每个上述点数据在上述世界坐标系中的三维坐标标记至上述原始栅格地图中;第一计算子单元,用于计算上述原始栅格地图中每个栅格被每个上述点数据占用的概率值,得到上述占用概率值集合。
7、在一个示例性实施例中,第一计算子单元,包括:第一确定子模块,用于确定上述水池机器人在上述目标水域中的当前位姿数据;第二确定子模块,用于确定上述原始栅格地图中每个上述栅格的栅格值,其中,上述栅格值用于表示上述栅格被上述点云数据中的点数据占用的状态;第三确定子模块,用于利用上述当前位姿数据与每个上述栅格的栅格值确定每个栅格被每个上述点数据占用的概率值,得到上述占用概率值集合。
8、在一个示例性实施例中,第二确定单元,包括:第一确定子单元,用于确定上述占用概率值集合中大于第一预设阈值的占用概率值,得到目标占用概率值集合;第二确定子单元,用于从上述原始栅格地图的上述栅格中,确定上述目标占用概率值集合对应的目标栅格,并将上述障碍物标记至上述目标栅格中。
9、在一个示例性实施例中,上述第一构建模块,包括:第三确定单元,用于确定上述水池机器人与上述障碍物之间的位置关系;第四确定单元,用于基于上述位置关系确定上述障碍物的上述当前位置,其中,上述当前位置用于表示上述障碍物在世界坐标系中的三维坐标;第一标记单元,用于将上述当前位置标记至上述原始栅格地图中,更新上述障碍物在上述原始栅格地图中标记的位置,得到上述目标栅格地图。
10、在一个示例性实施例中,上述装置还包括:上述装置还包括:第三确定模块,用于将上述当前位置标记至上述原始栅格地图中,更新上述障碍物在上述原始栅格地图中标记的位置,得到上述目标栅格地图之后,确定上述水池机器人从上述目标水域中的初始位置移动到第一位置的数据累积量和数据变化量,其中,上述第一位置是获取前一帧点云数据时上述水池机器人的位置,上述前一帧点云数据和上述点云数据是相邻的两帧点云数据;第一预测模块,用于按照上述数据累积量和上述数据变化量预测上述水池机器人在世界坐标系中的当前坐标,得到预测世界坐标;第一更新模块,用于利用上述预测世界坐标和上述水池机器人与上述障碍物之间的位置关系更新上述障碍物的位置,并更新上述目标栅格地图。
11、根据本申请的又一个实施例,还提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,其中,计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
12、根据本申请的又一个实施例,还提供了一种水池机器人,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述任一项方法实施例中的步骤。
13、通过本申请,由于是通过线激光组件获取到的点云数据,并利用点云数据确定目标水域中的障碍物在原始栅格地图中标记的位置。可以利用障碍物的实际位置对障碍物在原始栅格地图中标记的位置进行更新,从而可以准确的建立目标栅格地图。因此,可以解决相关技术中存在的存在难以在水中精确建图的问题,达到提高水池机器人在水中的建图的精确度的效果。
技术特征:1.一种构建栅格地图的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述线激光组件包括单线激光传感器,且所述单线激光传感器设置于所述水池机器人的边角处,在水池机器人在目标水域中移动的过程中,确定线激光组件获取到的点云数据,包括:
3.根据权利要求1所述的方法,其特征在于,利用所述点云数据确定所述目标水域中的障碍物在原始栅格地图中标记的位置,包括:
4.根据权利要求3所述的方法,其特征在于,确定所述原始栅格地图中的栅格被所述点云数据中的多个点数据占用的占用概率值,得到占用概率值集合,包括:
5.根据权利要求4所述的方法,其特征在于,计算所述原始栅格地图中每个栅格被每个所述点数据占用的概率值,得到所述占用概率值集合,包括:
6.根据权利要求3所述的方法,其特征在于,利用所述占用概率值集合确定所述障碍物在所述原始栅格地图的栅格中的位置,并对栅格位置进行标记,包括:
7.根据权利要求1所述的方法,其特征在于,利用确定的所述障碍物的当前位置更新所述障碍物在所述原始栅格地图中标记的位置,以构建目标栅格地图,包括:
8.根据权利要求7所述的方法,其特征在于,将所述当前位置标记至所述原始栅格地图中,更新所述障碍物在所述原始栅格地图中标记的位置,得到所述目标栅格地图之后,所述方法还包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,其中,所述计算机程序被处理器执行时实现所述权利要求1至8任一项中所述的方法的步骤。
10.一种水池机器人,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述权利要求1至8任一项中所述的方法的步骤。
技术总结本申请实施例提供了一种构建栅格地图的方法及存储介质、水池机器人,该方法包括:在水池机器人在目标水域中移动的过程中,确定线激光组件获取到的点云数据,其中,线激光组件设置在水池机器人的一侧;利用点云数据确定目标水域中的障碍物在原始栅格地图中标记的位置;利用确定的障碍物的当前位置更新障碍物在原始栅格地图中标记的位置,以构建目标栅格地图。通过本申请,解决了相关技术中存在的存在难以在水中精确建图的问题,达到提高水池机器人在水中的建图的精确度的效果。
技术研发人员:张石磊
受保护的技术使用者:星迈创新科技(苏州)有限公司
技术研发日:技术公布日:2024/1/5