一种多转角测量结构的制作方法
本发明涉及一种动感单车的把手装置,尤其是涉及一种多转角测量结构。
背景技术:
1、现有的动感单车一般把手和车身是固定连接成一个整体,无法实现把手的旋转以及缺少对把手旋转角度的测量功能。
2、动感单车的结构中,是放置在地面上的,把手旋转通过采集骑行者对把手的控制角度之后,进一步的和数字化3d模拟场景联动之后,更进一步的模拟自行车的骑行路况。过设计一种多转角测量结构,主要目的是通过测量把手旋转的角度之后而给上位机传递精确的角度数据,及时准确的将车辆的状态反映在数字化3d模拟场景中。
3、然而这种无法旋转的把手结构,无法支撑对动感单车的人机工程模拟。现有的大部分室内动感单车,人们只能坐在车座上蹬脚踏板带动飞轮转动,由飞轮提供人们锻炼所需的阻力,锻炼过程枯燥且乏味。通过设计一种多转角测量装置,从角度传感器获得车把转动信息,及时准确的将车辆的状态反映在数字化3d模拟场景中,让健身人员有一种身临其境的感觉,增强了骑行的真实感和丰富感。
技术实现思路
1、本发明提供了一种多转角测量结构,解决了动感单车的把手旋转以及旋转时的角度测速问题,其技术方案如下所述:
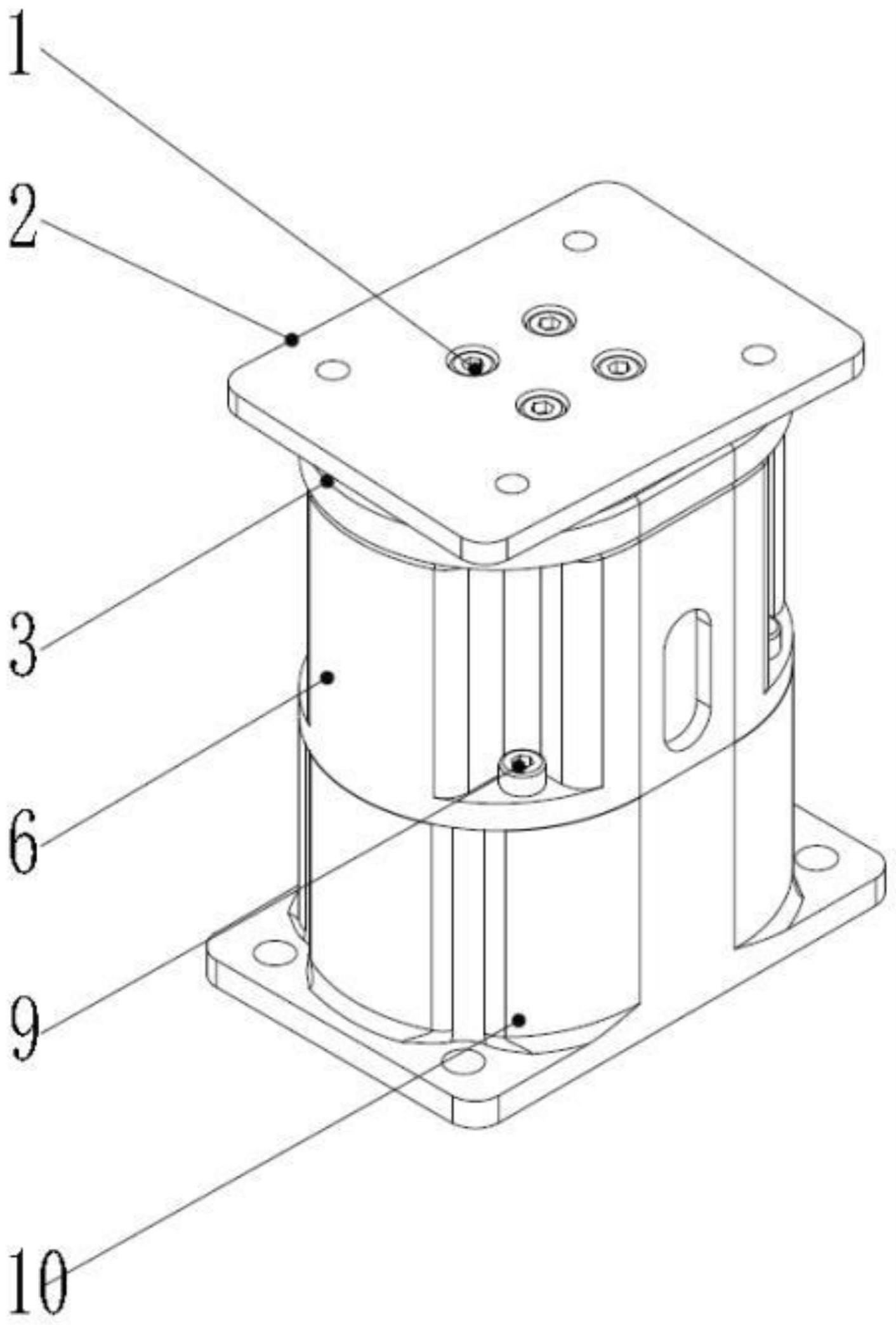
2、一种多转角测量结构,包括从上到下固定连接的轴承盖、轴承座和底座,三者形成的内腔中设置有旋转轴、轴承、阻尼器和编码器,所述旋转轴的圆周表面从上到下,依次设置有与轴承内圈固定连接的第一台阶,与阻尼器相连接的第二台阶,以及与编码器的输出轴相连接的第三台阶,所述轴承的外圈安装在轴承座上,所述阻尼器安装在轴承座的内腔,所述编码器安装在底座的内腔。
3、所述轴承盖安装在轴承座上方,两者连接部位设置有与轴承外圈配合的开槽,通过轴承盖防止轴承从轴承座脱出。
4、所述轴承盖的中心设置有开孔,开孔的周边设置有螺纹孔,用于通过螺栓固定到轴承座上表面。
5、所述轴承盖的开孔部位下方开槽,所述轴承座与轴承盖相连接的上表面开槽。
6、所述轴承的内圈用于和旋转轴的第一台阶固定连接,所述旋转轴的第一台阶下侧设置有凸起,用于卡住轴承的内圈下方。
7、所述旋转轴的第二台阶直径小于第一台阶,且大于第三台阶。
8、所述旋转轴的上方设置有固定板,固定板通过旋转轴固定螺钉安装在旋转轴上,使得旋转轴和固定板实现同步转动,通过固定板卡住轴承的内圈上方。
9、所述轴承座的下方和底座连接在一起,编码器通过编码器固定螺钉安装在底座的内腔。
10、所述固定板的上表面用于固定连接动感单车的把手,所述底座的下表面用于固定连接动感单车的车体。
11、所述旋转轴的下端穿过阻尼器,其下方的第三台阶通过连轴器和编码器的输出轴连接,通过编码器实现旋转轴的实时角度测量。
12、所述多转角测量结构,结构简单,操作方便、省力省时、可靠性较高,成本较低,使用时通过底座和动感单车的把手调节杆安装,动感单车把手安装在固定板上,可以适配不同型号的动感单车,不受安装位置限制,并且内部的阻尼器不仅能够为动感单车把手提供旋转功能,而且还能提供旋转阻力,编码器更可为把手旋转提供实时反馈旋转角度实时测量功能,因此实用性较好,易于推广应用,具有较大实用价值。
技术特征:
1.一种多转角测量结构,其特征在于:包括从上到下固定连接的轴承盖、轴承座和底座,三者形成的内腔中设置有旋转轴、轴承、阻尼器和编码器,所述旋转轴的圆周表面从上到下,依次设置有与轴承内圈固定连接的第一台阶,与阻尼器相连接的第二台阶,以及与编码器的输出轴相连接的第三台阶,所述轴承的外圈安装在轴承座上,所述阻尼器安装在轴承座的内腔,所述编码器安装在底座的内腔。
2.根据权利要求1所述的多转角测量结构,其特征在于:所述轴承盖安装在轴承座上方,两者连接部位设置有与轴承外圈配合的开槽,通过轴承盖防止轴承从轴承座脱出。
3.根据权利要求1所述的多转角测量结构,其特征在于:所述轴承盖的中心设置有开孔,开孔的周边设置有螺纹孔,用于通过螺栓固定到轴承座上表面。
4.根据权利要求3所述的多转角测量结构,其特征在于:所述轴承盖的开孔部位下方开槽,所述轴承座与轴承盖相连接的上表面开槽。
5.根据权利要求1所述的多转角测量结构,其特征在于:所述轴承的内圈用于和旋转轴的第一台阶固定连接,所述旋转轴的第一台阶下侧设置有凸起,用于卡住轴承的内圈下方。
6.根据权利要求1所述的多转角测量结构,其特征在于:所述旋转轴的第二台阶直径小于第一台阶,且大于第三台阶。
7.根据权利要求1所述的多转角测量结构,其特征在于:所述旋转轴的上方设置有固定板,固定板通过旋转轴固定螺钉安装在旋转轴上,使得旋转轴和固定板实现同步转动,通过固定板卡住轴承的内圈上方。
8.根据权利要求1所述的多转角测量结构,其特征在于:所述轴承座的下方和底座连接在一起,编码器通过编码器固定螺钉安装在底座的内腔。
9.根据权利要求7所述的多转角测量结构,其特征在于:所述固定板的上表面用于固定连接动感单车的把手,所述底座的下表面用于固定连接动感单车的车体。
10.根据权利要求1所述的多转角测量结构,其特征在于:所述旋转轴的下端穿过阻尼器,其下方的第三台阶通过连轴器和编码器的输出轴连接,通过编码器实现旋转轴的实时角度测量。
技术总结
本发明提供一种多转角测量结构,包括从上到下固定连接的轴承盖、轴承座和底座,三者形成的内腔中设置有旋转轴、轴承、阻尼器和编码器,所述旋转轴的侧面从上到下,依次设置有与轴承内圈固定连接的第一台阶,与阻尼器相连接的第二台阶,以及与编码器的输出轴相连接的第三台阶,所述轴承的外圈安装在轴承座上,所述阻尼器安装在轴承座的内腔,所述编码器安装在底座的内腔。本发明可以适配不同型号的动感单车,不受安装位置限制,并且内部的阻尼器不仅能够为动感单车把手提供旋转功能,而且还能提供旋转阻力,编码器更可为把手旋转提供实时反馈旋转角度实时测量功能,因此实用性较好,易于推广应用,具有较大实用价值。
技术研发人员:白小军,胡光有,宋小东,马颖学
受保护的技术使用者:北京点银津达科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!