激光雷达扫描方法和激光雷达与流程
本公开涉及激光雷达扫描,特别是涉及一种激光雷达扫描方法和激光雷达。
背景技术:
1、随着激光雷达技术的发展,出现了激光雷达扫描技术。激光雷达在扫描中,为了满足视场和分辨率的需求,通常配置扫描系统来实现光束的偏转。通常激光雷达需要对水平和竖直两个方向进行扫描,因此扫描系统中通常实现的是二维扫描,并分别配置水平及垂直扫描装置。垂直扫描装置一般由振镜实现,实现竖直方向光束的偏转。水平扫描装置由多面旋转棱镜实现,用于水平方向光束的偏转。
2、然而,激光雷达的扫描系统在加工及装配的过程中,往往会出现角度偏差,会导致竖直方向的光束及/或水平方向的光束均存在角度偏差,影响激光雷达扫描时的准确度。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够修正激光雷达的目标扫描角度的偏差,保证雷达扫描过程中的准确度的激光雷达扫描方法和激光雷达。
2、第一方面,本公开提供了一种激光雷达扫描方法,所述方法包括:
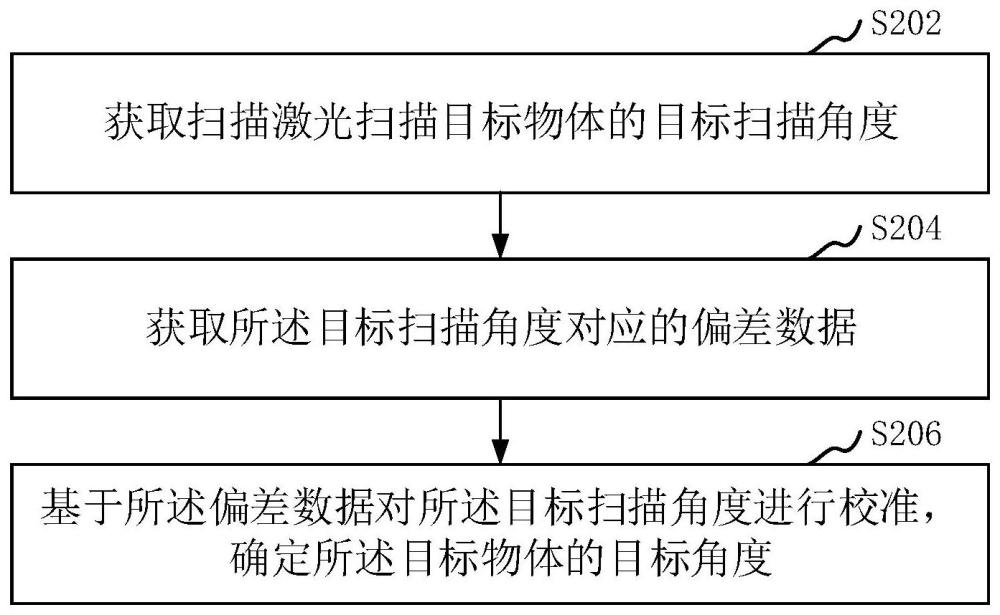
3、获取扫描激光扫描目标物体的目标扫描角度;
4、获取所述目标扫描角度对应的偏差数据,所述偏差数据通过扫描标定目标得到的标定扫描角度与预设的所述标定目标的设置角度比较得到;
5、基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度。
6、在其中一个实施例中,所述激光雷达包括:进行垂直扫描的振镜、进行水平扫描的多面棱镜、存储偏差数据的存储器以及对所述激光雷达出光角度进行测量的第一传感器和第二传感器;
7、所述获取扫描激光扫描目标物体的目标扫描角度,包括:
8、基于振镜和多面棱镜对目标物体的扫描,利用第一传感器测量水平扫描的出射角度得到所述目标扫描角度中的水平扫描角度,和/或,利用第二传感器测量垂直扫描的出射角度得到所述目标扫描角度中的垂直扫描角度。
9、在其中一个实施例中,所述存储器中存储的偏差数据包括:偏差数据的数值;或者,表征目标扫描角度与目标角度的映射关系。
10、在其中一个实施例中,所述基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度,包括:
11、在利用所述第一传感器测量得到所述水平扫描角度的情况下,根据所述水平扫描角度从所述存储器中读取所述多面棱镜中工作反射面所对应的水平偏差数据;
12、将所述水平扫描角度与所述工作反射面所对应的水平偏差数据进行运算,得到所述激光雷达扫描所述目标物体的校准后水平目标角度。
13、在其中一个实施例中,所述存储器中存储所述多面棱镜中的各个反射面对应的水平偏差数据,同一个反射面的水平偏差数据的取值相同。
14、在其中一个实施例中,所述水平扫描角度是利用第一传感器测量所述多面棱镜下方码盘的旋转角度获得的。
15、在其中一个实施例中,所述将所述水平扫描角度与所述工作反射面所对应的水平偏差数据进行运算包括:
16、在所述存储器中存储的偏差数据为数值时,将所述水平扫描角度加上所述水平偏差数据得到所述校准后水平目标角度;
17、在所述存储器中存储的偏差数据为映射关系时,基于所述映射关系计算得出所述水平扫描角度对应的校准后水平目标角度。
18、在其中一个实施例中,所述基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度,包括:
19、在利用所述第二传感器测量得到所述垂直扫描角度的情况下,根据所述垂直扫描角度从所述存储器中读取所述多面棱镜中工作反射面所对应的垂直偏差数据;
20、将所述垂直扫描角度与所述工作反射面所对应的垂直偏差数据进行运算,得到所述激光雷达扫描所述目标物体的校准后垂直目标角度。
21、在其中一个实施例中,所述将所述垂直扫描角度与所述工作反射面所对应的垂直偏差数据进行运算包括:
22、在所述存储器中存储的偏差数据为数值时,将所述垂直扫描角度加上所述水平偏差数据得到所述校准后垂直目标角度;
23、在所述存储器中存储的偏差数据为映射关系时,基于所述映射关系计算得出所述垂直扫描角度对应的校准后垂直目标角度;
24、其中,所述垂直扫描角度是利用第二传感器测量所述振镜的偏转角度获得的。
25、在其中一个实施例中,所述偏差数据是通过将扫描标定目标得到的标定扫描角度与预设的所述标定目标的设置角度进行比较得到。
26、第二方面,本公开还提供了一种激光雷达,包括处理器、连接处理器与元件并传输数据和指令的控制总线、发射扫描激光的激光模组、进行垂直扫描的振镜、进行水平扫描的多面棱镜、存储偏差数据的存储器以及对所述激光雷达出光角度进行测量角度传感器,所述处理器用于通过控制振镜和多面棱镜的旋转获取激光模组发出的扫描激光扫描目标物体的目标扫描角,并通过角度传感器获取目标物体的目标扫描角度,还用于从所述存储器中获取所述目标扫描角度对应的偏差数据,并基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度。
27、上述各实施例中,通过获取扫描激光扫描目标物体的目标扫描角度,然后可以获取所述目标扫描角度对应的偏差数据,基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度。利用本公开实施例能够在激光雷达扫描目标物体的同时修正激光雷达在装配过程中存在装配偏差或者由于加工工艺的精度限制造成的偏差值,提高激光雷达扫描目标物体输出的目标角度的精度,进而使得激光雷达的扫描结果更加准确。
技术特征:
1.一种激光雷达扫描方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述激光雷达包括:进行垂直扫描的振镜、进行水平扫描的多面棱镜、存储偏差数据的存储器以及对所述激光雷达出光角度进行测量的第一传感器和第二传感器;
3.根据权利要求2所述的方法,其特征在于,所述存储器中存储的偏差数据包括:偏差数据的数值;
4.根据权利要求3所述的方法,其特征在于,所述基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度,包括:
5.根据权利要求4所述的方法,其特征在于,存储器中存储所述多面棱镜中的各个反射面对应的水平偏差数据,同一个反射面的水平偏差数据的取值相同。
6.根据权利要求5所述的方法,其特征在于,所述水平扫描角度是利用第一传感器测量所述多面棱镜下方码盘的旋转角度获得的。
7.根据权利要求4所述的方法,其特征在于,所述将所述水平扫描角度与所述工作反射面所对应的水平偏差数据进行运算包括:
8.根据权利要求2所述的方法,其特征在于,所述基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度,包括:
9.根据权利要求8所述的方法,其特征在于,所述将所述垂直扫描角度与所述工作反射面所对应的垂直偏差数据进行运算包括:
10.根据权利要求1所述的方法,其特征在于,所述偏差数据是通过将扫描标定目标得到的标定扫描角度与预设的所述标定目标的设置角度进行比较得到。
11.一种激光雷达,其特征在于,包括处理器、连接处理器与元件并传输数据和指令的控制总线、发射扫描激光的激光模组、进行垂直扫描的振镜、进行水平扫描的多面棱镜、存储偏差数据的存储器以及对所述激光雷达出光角度进行测量角度传感器,所述处理器用于通过控制振镜和多面棱镜的旋转获取激光模组发出的扫描激光扫描目标物体的目标扫描角,并通过角度传感器获取目标物体的目标扫描角度,还用于从所述存储器中获取所述目标扫描角度对应的偏差数据,并基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度。
技术总结
本公开涉及一种激光雷达扫描方法和激光雷达。扫描方法包括:获取扫描激光扫描目标物体的目标扫描角度;获取所述目标扫描角度对应的偏差数据,所述偏差数据通过扫描标定目标得到的标定扫描角度与预设的所述标定目标的设置角度比较得到;基于所述偏差数据对所述目标扫描角度进行校准,确定所述目标物体的目标角度。采用本方法能够修正激光雷达的目标扫描角度的偏差,保证激光雷达扫描过程中的准确度。
技术研发人员:周军,籍勇翔,郑学哲
受保护的技术使用者:苏州旭创科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!