交通监管雷达测速方法
本发明涉及交通监控和雷达测速,尤其涉及一种交通监管雷达测速方法。
背景技术:
1、近十年来,我国的公路建设飞速发展,随着公路建设水平的提升以及智慧交通、车路协同的市场需求,交通监管雷达需要具备更高的精度、更大的覆盖范围以用于多车道的高精度的测速、分类等。现有的交通监管雷达形式上分为:正侧视/斜视雷达、单通道/多通道雷达。现有的系统在系统体制、信号处理上均存在一定的缺陷,急需采用合理的技术体制结合目标的运动模型与电磁散射机制研究更高精度的测速方法。
2、现有的国内外技术方案和装置存在如下几种缺陷:单通道正侧视雷达安装在路边,雷达的视线中心垂直于车道。非相干单通道前视雷达通过将回波信号的持续时间与天线的波束宽度相结合来确定车辆的速度。由于很难提前准确知道车辆的长度,通过持续时间速度测量的精度很低。将多普勒相位建模用于速度测量的单通道交通雷达精度也不高,因为在交通雷达类似的近距离应用中,随机闪烁相位对速度测量的影响很大;且信号处理过程中需要在雷达脉冲间截取车辆进入波束和离开波束的部分,弃置车辆经过雷达视线中心的部分,由于很难确定截断位置,因此很难在实时处理中实现。使用一维距离像中的距离徙动曲线和轨迹跟踪来进行高精度测速,执行此类处理需要雷达具备较大的带宽,导致系统射频设备和采样器的成本显著增加。
3、单通道斜视雷达安装在路边,雷达视线中心与车道保持一定角度,而不是垂直于车道。由于雷达的多普勒中心与斜视条件下的速度直接相关,可以直接进行速度测量,并可以进行逆合成孔径成像。然而,在斜视条件下,远端天线的波束覆盖范围会增加,导致前后车辆同时进入波束,无法分离。因此,单通道斜视雷达通常只能在较窄的高速公路上使用。
4、双通道正侧视雷达安装在路边,雷达的视线中心垂直于车道。由于单通道雷达的上述缺点,双通道雷达最近被提出用于交通监控。传统的非相干处理方法通过测量两个通道的回波时间差和接收天线之间的距离来获得车辆速度,但是非相干测速的精度依赖于较大的收发间距,在有限的设备体积下很难实现高精度测速。当使用相干方法进行速度测量时,通过基于双通道相位的两个通道的相位差来获得目标的角闪烁信息。利用角闪烁信息与多普勒频率之间的关系进行速度反演是一种新的方法,受到闪烁噪声与热噪声的影响,角闪烁与多普勒频率的关联性将显著下降,影响速度测量精度。
5、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于,提供一种交通监管雷达测速方法,以解决上述至少一部分缺陷,通过基于角闪烁-多普勒频率联合估计的高精度测速方法,实现对交通车辆高精度的速度测量。
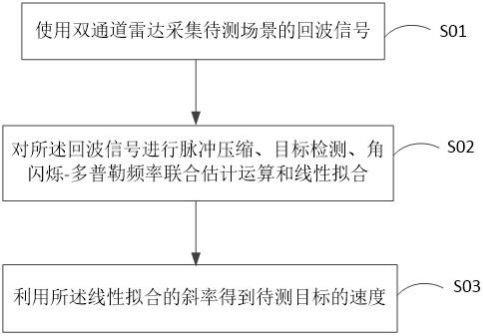
2、本发明提供的一种交通监管雷达测速方法,包括:使用双通道雷达采集待测场景的回波信号;对所述回波信号进行脉冲压缩、目标检测、角闪烁-多普勒频率联合估计运算和线性拟合;利用所述线性拟合的斜率得到待测目标的速度。
3、可选地,所述使用双通道雷达采集待测场景的回波信号包括:向所述待测场景空间发射信号,形成发射信号,其中,所述发射信号经耦合器耦合,还形成一个参考信号;接收所述发射信号经所述待测场景返回的两路回波信号;将所述两路回波信号与所述参考信号进行混频处理得到两路中频信号,将所述两路中频信号作为所述双通道雷达采集待测场景的回波信号。
4、可选地,所述对所述回波信号进行脉冲压缩、目标检测、角闪烁-多普勒频率联合估计运算包括:对所述两路中频信号进行脉冲压缩操作得到两路脉冲压缩信号;对所述两路脉冲压缩信号进行目标检测,将所述两路脉冲压缩信号大于阈值的所对应的脉冲数记为待测目标;对所述待测目标的两路脉冲压缩信号进行角闪烁-多普勒频率联合估计运算,得到所述待测目标的速度。
5、可选地,所述发射信号由发射天线发出,其中,所述发射信号包括多个重复的脉冲信号,所述多个重复的脉冲信号为高频率脉冲信号。
6、可选地,所述两路回波信号由两个接收天线接收并传输到两个通道中,其中,所述两路回波信号是所述发射信号与所述待测目标的卷积。
7、可选地,所述对所述两路中频信号进行脉冲压缩运算,包括:对所述多个重复的脉冲信号全部进行快速傅里叶变换。
8、可选地,所述对所述两路脉冲压缩信号进行目标检测运算,包括:对通道一脉冲压缩后的时间序列信号xm和通道二脉冲压缩后的时间序列信号ym进行乘积、取模操作,得到时间序列信号,m为所述时间序列由先到后依据时间排列序号;对所述时间序列zm进行阈值检测,将大于阈值a的目标记录为待测目标。
9、可选地,所述阈值检测包括:连续检测到k个脉冲的目标,当k大于等于a时,将所述目标记为待测目标,记录所述待测目标出现时对应的时间排列序号n,n-1,…, n-k+1。
10、可选地,所述对所述两路中频信号进行角闪烁-多普勒频率联合估计运算包括:根据同一个通道相邻两个脉冲的时间序列信号xm和xm+1,得到所述同一个通道相邻两个脉冲之间的干涉值α,其中,所述干涉值α的相位表示多普勒频率:
11、,
12、其中,fc为中心频率,j为虚数单位,v为所述待测目标速度,θm为发射第m个脉冲时闪烁的角度,pri为脉冲重复周期,c为光速;
13、根据两个不同通道中的两个脉冲的时间序列信号xm和ym,得到所述两个不同通道中的两个脉冲的干涉值β,其中,所述干涉值β的相位表示角闪烁,
14、,
15、其中,xm为一个通道接收到的第m个脉冲的时间序列信号,ym为另一个通道接收到的第m个脉冲的时间序列信号,△x为两个接收天线等效相位中心的间距;
16、根据所述干涉值α和所述干涉值β计算所述待测目标的速度。
17、可选地,所述根据所述干涉值α和所述干涉值β计算所述待测目标的速度包括:计算两个通道在不同时间的回波矩阵s,其中,
18、,
19、其中,k为检测到所述待测目标对应k个脉冲,n,n-1,…,n-k+1为所述待测目标出现时对应脉冲信号的时间排列序号,xn和yn分别为所述时间排列序号为n时对应的两个通道中的两个脉冲的时间序列信号。
20、可选地,所述根据所述干涉值α和所述干涉值β计算所述待测目标的速度还包括:对所述回波矩阵s进行奇异值分解,得到所述回波矩阵s的左奇异向量us。
21、可选地,所述根据所述干涉值α和所述干涉值β计算所述待测目标的速度还包括:采用esprit最小二乘法获得干涉相位的平滑值:
22、,
23、,
24、其中, ,,
25、i2表示二阶单位阵,表示克罗内克积,表示伪逆矩阵。
26、可选地,所述根据所述干涉值α和所述干涉值β计算所述待测目标的速度还包括:对所述待测目标的多组角度α和β的相位进行线性拟合,通过所述线性拟合的斜率k1计算出所述待测目标的速度:
27、。
28、通过基于角闪烁-多普勒频率联合估计的高精度测速方法,不仅提升了交通雷达在近场工作的能力,具有更好的噪声平滑效果,能够在低信噪比下实现高精度测速,而且可以提升雷达测速装置的观测车道范围,规避现有技术手段中只能观测测量较窄公路车速的问题,提升应用范围,可应用于宽公路双向多车道场景,并能实现多车道多车辆同时高精度测量。
- 还没有人留言评论。精彩留言会获得点赞!