基于激光雷达的目标智能检测定位方法与流程
本发明涉及激光雷达定位,具体涉及基于激光雷达的目标智能检测定位方法。
背景技术:
1、在煤矿勘探过程中,煤田地质构造相对复杂,在煤矿勘探开采矿用机车行驶过程中,由于煤矿井下矿道空间有限,且光照光线亮度通常较差,不能满足可视条件,因此,在煤矿开采过程极易出现煤炭开采安全事故,造成不必要的人员伤亡和经济财产损失。激光雷达是一种利用激光波束能量的高度穿透性和指向性优良特点,实现对低光照环境下目标探测跟踪识别技术。因此对于煤炭勘探过程中环境光照亮度缺点,为了提高煤矿开采过程中障碍物目标检查定位的准确性,使用激光雷达设备对复杂环境中的障碍物目标进行检测定位。
2、但激光雷达数据容易受到电流噪声、热噪声等多种环境噪声影响导致采集得到的激光雷达传感数据存在噪声干扰,与实际检测目标之间存在较大误差。传统变分模态分解算法对激光雷达传感数据处理过程中分解分量个数设置不当,导致噪声干扰数据不能准确消除从而影响目标检测定位的准确性。
技术实现思路
1、本发明提供基于激光雷达的目标智能检测定位方法,以解决上述问题,所采用的技术方案具体如下:
2、本发明一个实施例基于激光雷达的目标智能检测定位方法,该方法包括以下步骤:
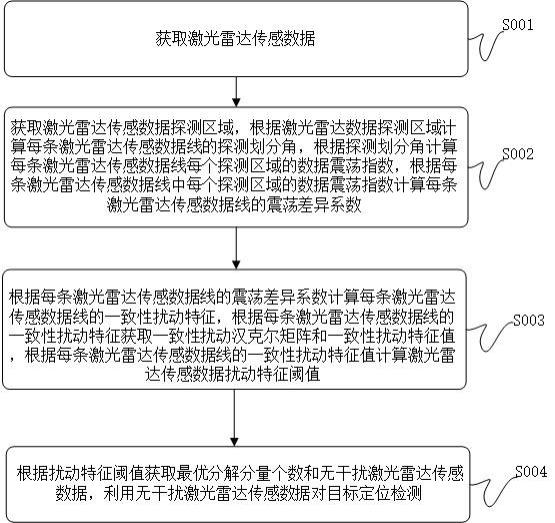
3、获取激光雷达传感数据;
4、获取激光雷达传感数据探测区域,根据激光雷达数据探测区域计算每条激光雷达传感数据线的探测划分角,根据探测划分角计算每条激光雷达传感数据线每个探测区域的数据震荡指数,根据每条激光雷达传感数据线中每个探测区域的数据震荡指数计算每条激光雷达传感数据线的震荡差异系数;
5、根据每条激光雷达传感数据线的震荡差异系数计算每条激光雷达传感数据线的一致性扰动特征,根据每条激光雷达传感数据线的一致性扰动特征获取一致性扰动汉克尔矩阵和一致性扰动特征值,根据每条激光雷达传感数据线的一致性扰动特征值计算激光雷达传感数据扰动特征阈值,根据扰动特征阈值获取最优分解分量个数和无干扰激光雷达传感数据,利用无干扰激光雷达传感数据对目标定位检测。
6、优选的,所述根据激光雷达数据探测区域计算每条激光雷达传感数据线的探测划分角的方法为:
7、将每条激光雷达传感数据线每个探测区域中最大传感数据角度和最小传感数据角度的差值记为第一角度差值,将落入最多分布差异区间中所有传感数据角度均值与落入最少分布差异区间中所有传感数据角度均值的差记为第二角度差值,将第一角度差值和第二角度差值的均值记为探测划分角。
8、优选的,所述最多分布差异区间和最少分布差异区间的获取方法为:
9、利用每条激光雷达传感数据线每个探测区域中所有数据角度的均值划分为两个不同的区间,将激光雷达传感数据最多的区间中记为最多分布差异区间,将激光雷达传感数据最少的区间记为最少分布差异区间。
10、优选的,所述根据激光雷达传感数据探测区域计算每条激光雷达传感数据线每个探测区域的数据震荡指数的具体方法为:
11、
12、上述公式中,表示了在探测区域中激光雷达探测角度区间的总个数,表示了第个激光雷达探测角度区间的激光雷达数据均值,表示了第个激光雷达探测角度区间的激光数据均值,表示了第条激光雷达传感数据线中探测区域中的数据震荡指数;
13、获得每条激光雷达传感数据线每个探测区域的数据震荡指数。
14、优选的,所述根据每条激光雷达传感数据线中每个探测区域的数据震荡指数计算每条激光雷达传感数据线的震荡差异系数的方法为:
15、将每条激光雷达传感数据线中所有探测区域的数据震荡指数的均值记为震荡差异系数。
16、优选的,所述根据每条激光雷达传感数据线的震荡差异系数计算每条激光雷达传感数据线的一致性扰动特征的具体方法为:
17、
18、上述公式中,表示了归一化函数,表示了所有激光雷达传感数据线中最大的激光雷达探测数据,表示了所有激光雷达传感数据线中最小的激光雷达探测数据,m表示了激光雷达传感数据线总个数,表示了第条激光雷达传感数据线的震荡差异系数,表示了第条激光雷达传感数据线的震荡差异系数,表示了两个序列之间的dtw距离,表示了第条激光雷达传感数据线中异常探测区域激光雷达传感数据序列,表示了第条激光雷达传感数据线的异常探测区域激光雷达传感数据序列,表示了第条激光雷达探测数据的一致性扰动特征。
19、优选的,所述激光雷达传感数据线的异常探测区域的获取方法为:
20、将每条激光雷达传感数据线中所有探测区域震荡指数最大的区域记为异常探测区域。
21、优选的,所述根据每条激光雷达传感数据线的一致性扰动特征获取一致性扰动汉克尔矩阵和一致性扰动特征值得获取方法为:
22、将每个激光雷达传感数据线的一致性扰动特征按照激光雷达传感器排列顺序构建得到激光雷达传感数据一致性扰动特征序列,将激光雷达传感数据一致性扰动特征序列作为汉克尔矩阵构造算法输入得到一致性扰动汉克尔矩阵,使用奇异值分解算法得到一致性扰动特征值。
23、优选的,所述根据每条激光雷达传感数据线的一致性扰动特征值计算激光雷达传感数据扰动特征阈值的方法为:
24、
25、上述公式中,表示以自然常数为底的指数函数,表示了激光雷达传感数据一致性扰动汉克尔矩阵的最大特征值,表示了激光雷达传感数据一致性扰动汉克尔矩阵的最小特征值,表示了激光雷达传感数据一致性扰动汉克尔矩阵所有特征值的均值,表示了激光雷达传感数据一致性扰动汉克尔矩阵的扰动特征阈值。
26、优选的,所述根据扰动特征阈值获取最优分解分量个数和无干扰激光雷达传感数据,利用无干扰激光雷达传感数据对目标定位检测的方法为:
27、将一致性扰动特征值小于激光雷达传感数据扰动特征阈值的特征值个数记为最优分解分量个数,将最优分解分量个数作为分解算法的输入得到不同的激光雷达数据分量,消除噪声数据分量得到无干扰激光雷达传感数据,将无干扰激光雷达传感数据作为聚类算法输入得到的目标区域位置。
28、本发明的有益效果是:本发明结合激光雷达传感数据分布变化特点计算得到激光雷达探测划分角,同时利用激光雷达探测划分角获取得到激光雷达传感数据的震荡差异系数,相较于传统计算过程中数据均值方差等数据特征,通过不同探测划分角度中的激光雷达传感数据的数值变化特点进行分析,从而有效的表现了不同探测角度范围中激光雷达数据异常特点,更准确地表现了激光雷达传感数据中噪声干扰因素影响。进一步地,本发明利用震荡差异系数获取一致性扰动特征并构建得到相应的激光雷达传感数据一致性扰动汉克尔矩阵,通过矩阵分析手段对激光雷达传感数据中噪声干扰因素进行计算表征,较为准确地消除激光雷达传感数据中的噪声干扰分量,提高了激光雷达目标定位过程中的准确性。
技术特征:
1.基于激光雷达的目标智能检测定位方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据激光雷达数据探测区域计算每条激光雷达传感数据线的探测划分角的方法为:
3.根据权利要求2所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述最多分布差异区间和最少分布差异区间的获取方法为:
4.根据权利要求2所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据激光雷达传感数据探测区域计算每条激光雷达传感数据线每个探测区域的数据震荡指数的具体方法为:
5.根据权利要求4所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据每条激光雷达传感数据线中每个探测区域的数据震荡指数计算每条激光雷达传感数据线的震荡差异系数的方法为:
6.根据权利要求5所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据每条激光雷达传感数据线的震荡差异系数计算每条激光雷达传感数据线的一致性扰动特征的具体方法为:
7.根据权利要求6所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述激光雷达传感数据线的异常探测区域的获取方法为:
8.根据权利要求6所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据每条激光雷达传感数据线的一致性扰动特征获取一致性扰动汉克尔矩阵和一致性扰动特征值得获取方法为:
9.根据权利要求8所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据每条激光雷达传感数据线的一致性扰动特征值计算激光雷达传感数据扰动特征阈值的方法为:
10.根据权利要求1所述的基于激光雷达的目标智能检测定位方法,其特征在于,所述根据扰动特征阈值获取最优分解分量个数和无干扰激光雷达传感数据,利用无干扰激光雷达传感数据对目标定位检测的方法为:
技术总结
本发明涉及激光雷达定位技术领域,提出了基于激光雷达的目标智能检测定位方法,包括:获取激光雷达传感数据;获取激光雷达传感数据探测区域,根据激光雷达数据探测区域计算每条激光雷达传感数据线的探测划分角,根据探测划分角计算每条激光雷达传感数据线每个探测区域的数据震荡指数,根据数据震荡指数计算每条激光雷达传感数据线的震荡差异系数和一致性扰动特征,根据每条激光雷达传感数据线的一致性扰动特征获取一致性扰动汉克尔矩阵和一致性扰动特征值并计算扰动特征阈值,根据扰动特征阈值获取最优分解分量个数和无干扰激光雷达传感数据,利用无干扰激光雷达传感数据对目标定位检测。本发明有效的提高了激光雷达检测定位的准确性。
技术研发人员:钱继学,杨浩源,张铭原,李可,周震源,王永强,周扬,曹毅楠,马静,张雪芳,李坤,耿磊,王颢澄,李尚
受保护的技术使用者:徐州瑞控机电科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!