微波振动与形变位移测量的夹角标定方法及系统
本发明涉及振动与形变测量,具体地,涉及一种微波振动与形变位移测量的夹角标定方法及系统。
背景技术:
1、振动是自然界和工程中的一种普遍现象,振动与形变的测量可以为结构健康检测、材料性能评估、设备故障诊断、物体动态行为研究等提供关键传感数据,工程价值十分重要。按照测量方式不同,测试方法可分为接触式测量和非接触式测量,其中,非接触式方式由于对被测对象无损伤、无干扰,且适用于大型结构或远距离等不便近距离接触的对象,在工程实际中具有明显的优势。其中视觉和激光在测量性能、环境适应性以及硬件成本方面存在较大的局限性。基于微波感知的振动与形变位移测量是一种新型的振动与形变测量技术,可以实现微幅和大幅的振动与形变测量。然而,微波振动与形变位移测量直接得到的结果是目标沿微波收发器视线方向的位移,需要进行几何关系换算,而其前提是目标位移方向与微波感知视线方向的夹角φq已知。在实际工程测量中,如果遇到被测对象体积较大、结构较复杂、测点离微波收发器距离较远或者离地面较高等情况,往往难以测量目标沿其位移方向到微波收发器安装平面的垂直距离,也就难以确定夹角φq,无法实现高精度的位移测量几何换算,从而难以测得被测对象的实际位移时间序列。
2、专利文献cn105044693a(申请号:cn201510359715.0)公开了一种基于辅助阵元的微波关联成像雷达幅相误差校正方法,以估计微波关联成像雷达的幅相误差,进而通过对幅相误差进行补偿获得较为理想的时空辐射场。包括:步骤1:微波关联成像雷达的发射天线阵列发射多种波形,接收天线阵列接收对应的多种回波数据,对回波数据进行匹配滤波,并顺序排列得到回波数据矩阵;步骤2:对回波数据矩阵中的元素进行分组;步骤3:估计数据协方差矩阵;步骤4:进行目标角度估计,得到目标的方向向量;步骤5:分别对发射天线阵列的幅度误差和相位误差进行估计,得到对应的误差估计值;步骤6,根据发射天线阵列的幅度误差估计值和相位误差估计值,分别对发射天线阵列的幅度和相位进行校正。
3、现有的夹角标定需要测量微波收发器到目标位移方向的垂直距离l或者目标沿着位移方向到微波收发器安装平面的距离h,进而利用三角函数关系计算出目标位移方向与微波感知视线方向的夹角φq。在工程实际中,受限于测试环境,例如待测目标或测点所处高度较高、距离较远或者体积较大、结构复杂等情况,这两个距离的测量便利性、准确性均较差,且常常无法进行,导致无法测量被测目标或测点的真实位移信息。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种微波振动与形变位移测量的夹角标定方法及系统。
2、根据本发明提供的微波振动与形变位移测量的夹角标定方法,包括:
3、步骤1:通过直线运动机构使微波收发器与目标或测点之间产生单程或往复的相对位移,提取待测目标或测点的振动或形变位移时间序列,计算待测目标或测点位移方向与视线方向的夹角φq,完成标定过程;
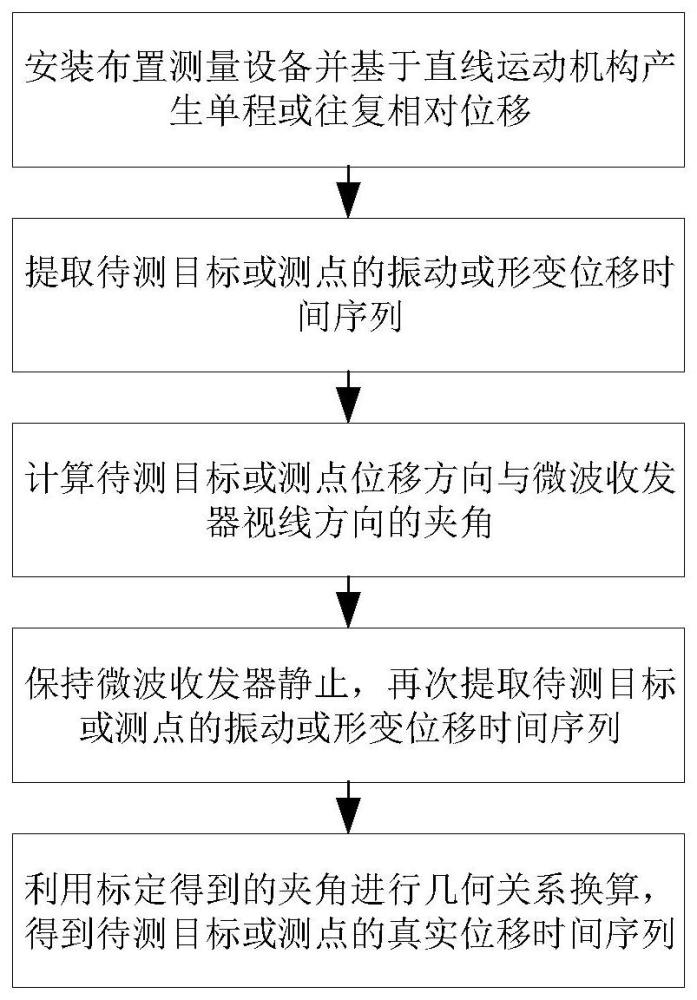
4、步骤2:保持微波收发器静止,再次提取待测目标或测点的振动或形变位移时间序列,利用标定得到的夹角φq对此序列进行几何关系换算,得到待测目标或测点的真实位移时间序列。
5、优选的,所述步骤1包括:
6、步骤1.1:安装布置测量设备并基于直线运动机构产生单程或往复相对位移;
7、步骤1.2:提取待测目标或测点的振动或形变位移时间序列;
8、步骤1.3:计算待测目标或测点位移方向与微波收发器视线方向的夹角φq;
9、所述步骤1.1包括:
10、将直线运动机构固定在地面或其他平台上,调整直线运动机构的位移方向,使之正对并垂直于待测目标或测点原本的位移方向,或使直线运动机构的位移方向平行于待测目标或测点原本的位移方向;将微波收发器安装在直线运动机构上,调整波束方向朝向待测目标或测点;
11、或者,将微波收发器固定在地面或其他平台上,调整波束方向朝向待测目标或测点,通过直线运动机构使待测目标或测点产生已知行程的位移,使直线运动机构的位移方向正对微波收发器并垂直于待测目标或测点的位移方向,或使直线运动机构的位移方向平行于待测目标或测点原本的位移方向。
12、优选的,所述步骤1.2包括:微波收发器发射和接收电磁波信号,然后移动直线运动机构使之产生幅值为的行程位移,同步采集微波收发器各通道的基带信号,从中提取待测目标或测点的振动或形变位移时间序列和包括峰值在内的信息。
13、优选的,所述步骤1.3包括:
14、根据相对运动关系,当微波收发器与目标或测点之间产生单程或往复的相对位移时,均将微波收发器视为静止,则位移由目标或测点产生,设此位移为当远小于微波收发器与待测目标或测点之间的距离时,微波收发器的测量结果近似等于在待测目标或测点对应的微波收发器视线方向上的投影微波收发器位移方向与视线方向构成的夹角θ及目标或测点位移方向与视线方向构成的夹角φq均近似认为不变。
15、当直线运动机构带动微波收发器运动且位移方向正对并垂直于待测目标或测点原本的位移方向时,或直线运动机构带动被测目标或测点运动且位移方向垂直于待测目标或测点原本的位移方向时,夹角φq应计算为:
16、
17、式中,x1(it)为步骤1.2中得到的微波收发器测得的待测目标或测点的位移时间序列,为步骤1.2中设定的直线运动机构的位移时间序列,i=1,2,…为扫频周期序号,t为单个扫频周期时间。
18、当直线运动机构带动微波收发器运动且位移方向平行于待测目标或测点原本的位移方向时,或直线运动机构带动被测目标或测点运动且位移方向平行于待测目标或测点原本的位移方向时,夹角φq应计算为:
19、
20、式中,x(it)为步骤1.2中得到的微波收发器测得的待测目标或测点的位移时间序列,为步骤1.2中设定的直线运动机构的位移时间序列,i=1,2,…为扫频周期序号,t为单个扫频周期时间。
21、优选的,所述步骤2包括:对待测目标或测点的位移时间序列进行几何关系换算,直线运动机构不动,使微波收发器保持静止,微波收发器的朝向与步骤1.1一致,接着执行步骤1.2,提取此时待测目标或测点的振动或形变位移时间序列x2(it),近似认为是待测目标或测点真实位移沿视线方向的分量,为几何关系换算后的待测目标或测点的真实位移时间序列。通过x2(it)和φq计算得到待测目标或测点的真实位移时间序列表达式为:
22、
23、根据本发明提供的微波振动与形变位移测量的夹角标定系统,包括:
24、模块m1:通过直线运动机构使微波收发器与目标或测点之间产生单程或往复的相对位移,提取待测目标或测点的振动或形变位移时间序列,计算待测目标或测点位移方向与视线方向的夹角φq,完成标定过程;
25、模块m2:保持微波收发器静止,再次提取待测目标或测点的振动或形变位移时间序列,利用标定得到的夹角φq对此序列进行几何关系换算,得到待测目标或测点的真实位移时间序列。
26、优选的,所述模块m1包括:
27、模块m1.1:安装布置测量设备并基于直线运动机构产生单程或往复位移;
28、模块m1.2:提取待测目标或测点的振动或形变位移时间序列;
29、模块m1.3:计算待测目标或测点位移方向与微波收发器视线方向的夹角φq;
30、所述模块m1.1包括:
31、将直线运动机构固定在地面或其他平台上,调整直线运动机构的位移方向,使之正对并垂直于待测目标或测点原本的位移方向,或使直线运动机构的位移方向平行于待测目标或测点原本的位移方向;将微波收发器安装在直线运动机构上,调整波束方向朝向待测目标或测点;
32、或者,将微波收发器固定在地面或其他平台上,调整波束方向朝向待测目标或测点,通过直线运动机构使待测目标或测点产生已知行程的位移,使直线运动机构的位移方向正对微波收发器并垂直于待测目标或测点的位移方向,或使直线运动机构的位移方向平行于待测目标或测点原本的位移方向。
33、优选的,所述模块m1.2包括:微波收发器发射和接收电磁波信号,然后移动直线运动机构使之产生幅值为的行程位移,同步采集微波收发器各通道的基带信号,从中提取待测目标或测点的振动或形变位移时间序列和包括峰值在内的信息。
34、优选的,所述模块m1.3包括:根据相对运动关系,当微波收发器与目标或测点之间产生单程或往复的相对位移时,均将微波收发器视为静止,则位移由目标或测点产生,设此位移为当远小于微波收发器与待测目标或测点之间的距离时,微波收发器的测量结果近似等于在待测目标或测点对应的微波收发器视线方向上的投影微波收发器位移方向与视线方向构成的夹角θ及目标或测点位移方向与视线方向构成的夹角φq均近似认为不变。
35、当直线运动机构带动微波收发器运动且位移方向正对并垂直于待测目标或测点原本的位移方向时,或直线运动机构带动被测目标或测点运动且位移方向垂直于待测目标或测点原本的位移方向时,夹角φq应计算为:
36、
37、式中,x1(it)为模块m1.2中得到的微波收发器测得的待测目标或测点的位移时间序列,为模块m1.2中设定的直线运动机构的位移时间序列,i=1,2,…为扫频周期序号,t为单个扫频周期时间。
38、当直线运动机构带动微波收发器运动且位移方向平行于待测目标或测点原本的位移方向时,或直线运动机构带动被测目标或测点运动且位移方向平行于待测目标或测点原本的位移方向时,夹角φq应计算为:
39、
40、式中,x1(it)为模块m1.2中得到的微波收发器测得的待测目标或测点的位移时间序列,为模块m1.2中设定的直线运动机构的位移时间序列,i=1,2,…为扫频周期序号,t为单个扫频周期时间。
41、优选的,所述模块m2包括:
42、对待测目标或测点的位移时间序列进行几何关系换算,直线运动机构不动,使微波收发器保持静止,微波收发器的朝向与模块m1.1一致,接着调用模块m1.2,提取此时待测目标或测点的振动或形变位移时间序列x2(it),近似认为是待测目标或测点真实位移沿视线方向的分量,为几何关系换算后的待测目标或测点的真实位移时间序列。通过x2(it)和φq计算得到待测目标或测点的真实位移时间序列表达式为:
43、
44、与现有技术相比,本发明具有如下的有益效果:
45、本发明通过设定已知行程的位移及微波收发器由此测得的位移时间序列来解算目标位移方向与微波感知视线方向的夹角,克服了现有微波振动与形变位移测量结果夹角标定适应场景有限、误差较大、操作不便等局限,实现了远距离、高空、复杂结构等户外复杂工况下的微波收发器视线与目标位移方向夹角的准确标定,提高了复杂工况下基于微波感知的振动与形变位移测量夹角标定的便利性和精确度,解决了微波振动与形变沿视线方向位移测量的局限性。
- 还没有人留言评论。精彩留言会获得点赞!