基于导航雷达引导的视觉单元观测方位角测量方法及系统与流程
本文件涉及组合导航,尤其涉及一种基于导航雷达引导的视觉单元观测方位角测量方法及系统。
背景技术:
1、目前导航雷达已经安装在石油、海岛等多地方区域,用于指定目标的跟踪和监视,然而现有导航雷达数据往往只能给出目标的位置和距离,无法得到视觉系统的形貌,因此基于视觉和导航雷达的联动是对导航雷达信息的一种补充。现有雷达和视觉系统的连动往往需要保证雷达和视觉系统的安装朝向和方位,甚至利用辅助点的方式实现雷达和视觉系统连动,因此,本领域需要一种新的基于导航雷达引导的视觉单元观测方位的测量方法来解决上述问题。
技术实现思路
1、本说明书一个或多个实施例提供了一种基于导航雷达引导的视觉单元观测方位角测量方法,包括:
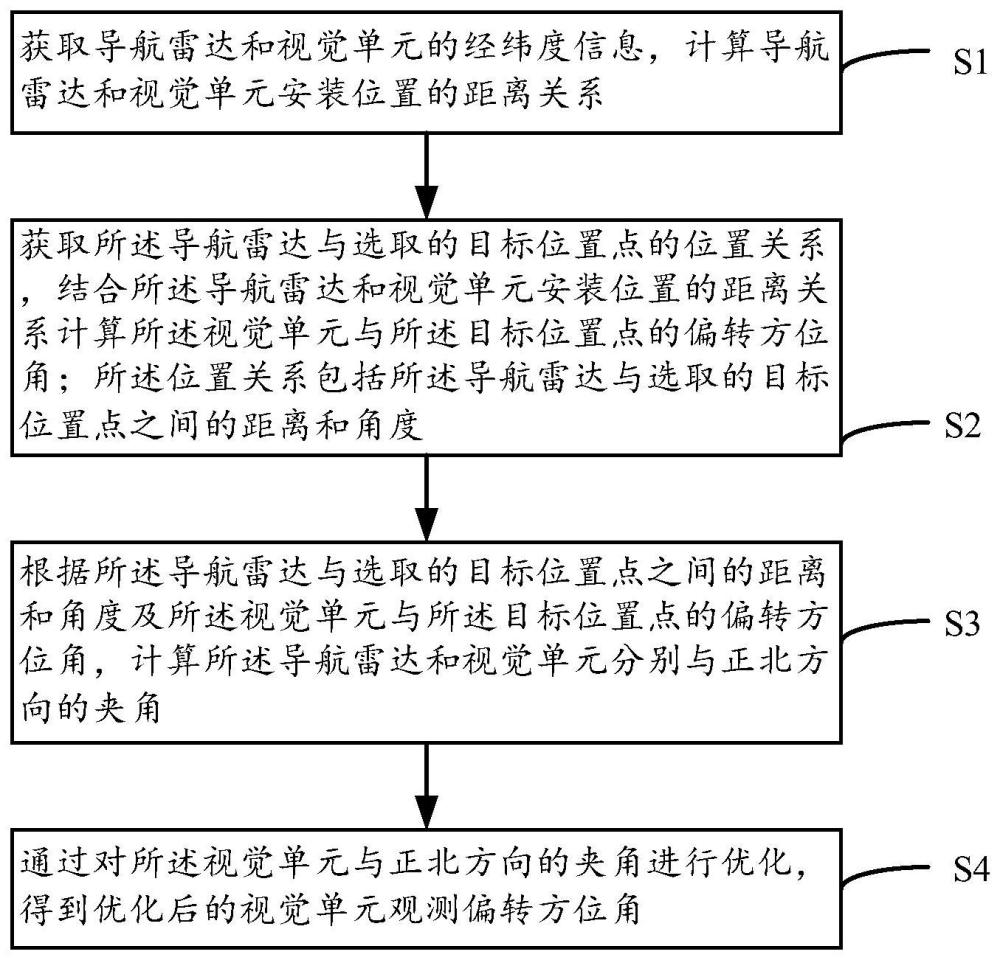
2、s1、获取导航雷达和视觉单元的经纬度信息,计算导航雷达和视觉单元安装位置的距离关系;
3、s2、获取所述导航雷达与选取的目标位置点的位置关系,结合所述导航雷达和视觉单元安装位置的距离关系计算所述视觉单元与所述目标位置点的偏转方位角;所述位置关系包括所述导航雷达与选取的目标位置点之间的距离和角度;
4、s3、根据所述导航雷达与选取的目标位置点之间的距离和角度及所述视觉单元与所述目标位置点的偏转方位角,计算所述导航雷达和视觉单元分别与正北方向的夹角;
5、s4、通过对所述视觉单元与正北方向的夹角进行优化,得到优化后的视觉单元观测偏转方位角。
6、本说明书一个或多个实施例提供了一种基于导航雷达引导的视觉单元观测方位角测量系统,包括:
7、第一计算模块:用于获取导航雷达和视觉单元的经纬度信息,计算导航雷达和视觉单元安装位置的距离关系;
8、第二计算模块:用于获取所述导航雷达与选取的目标位置点的位置关系,结合所述导航雷达和视觉单元安装位置的距离关系计算所述视觉单元与所述目标位置点的偏转方位角;所述位置关系包括所述导航雷达与选取的目标位置点之间的距离和角度;
9、夹角计算模块:用于根据所述导航雷达与选取的目标位置点之间的距离和角度及所述视觉单元与所述目标位置点的偏转方位角,计算所述导航雷达和视觉单元分别与正北方向的夹角;
10、优化模块:用于通过对所述视觉单元与正北方向的夹角进行优化,得到视觉单元最终观测偏转方位角。
11、本发明实施例还提供一种电子设备,包括:
12、处理器;以及,
13、被安排成存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使所述处理器实现上述基于导航雷达引导的视觉单元观测方位角测量方法的步骤。
14、本发明实施例还提供一种存储介质,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现上述基于导航雷达引导的视觉单元观测方位角测量方法的步骤。
15、本发明的有益效果如下:
16、本发明提供的基于导航雷达引导的视觉单元观测方位的测量方法能够对观测方位进行高精度、高灵活性的测量,无需严格限制雷达和视觉单元的安装角度,不需要提前知道雷达与正北方向夹角以及视觉单元与正北方向的夹角,也无需额外工具对安装角度进行测量,无需严格要求雷达获取目标的绝对经纬度准确,只需要保证目标相对雷达的距离和角度准确,安装环境要求简单。
17、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种基于导航雷达引导的视觉单元观测方位角测量方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取导航雷达和视觉单元的经纬度信息,计算导航雷达和视觉单元安装位置的距离关系具体包括:
3.根据权利要求2所述的方法,其特征在于,所述获取所述导航雷达与选取的目标位置点的位置关系,根据所述导航雷达和视觉单元安装位置的距离关系计算所述视觉单元与所述目标位置点的偏转方位角具体方法如公式1所示:
4.根据权利要求3所述的方法,其特征在于,所述根据所述导航雷达与选取的目标位置点之间的距离和角度及所述视觉单元与所述目标位置点的偏转方位角,计算所述导航雷达和视觉单元分别与正北方向的夹角具体包括:
5.根据权利要求4所述的方法,其特征在于,所述通过对所述视觉单元与正北方向的夹角进行优化,得到视觉单元最终观测偏转方位角具体方法为:
6.一种基于导航雷达引导的视觉单元观测方位角测量系统,其特征在于,包括:
7.根据权利要求6所述的系统,其特征在于,所述第一计算模块具体用于:
8.根据权利要求6所述的系统,其特征在于,所述夹角计算模块具体用于:
9.一种电子设备,其特征在于,包括:
10.一种存储介质,其特征在于,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现如权利要求1-5任一所述的基于导航雷达引导的视觉单元观测方位角测量方法的步骤。
技术总结
本说明书实施例提供了一种基于导航雷达引导的视觉单元观测方位角测量方法及系统,其中,方法包括:获取导航雷达和视觉单元的经纬度信息,计算导航雷达和视觉单元安装位置的距离关系;获取导航雷达与目标位置点的位置关系,结合导航雷达和视觉单元安装位置的距离关系计算视觉单元与目标位置点的偏转方位角;根据导航雷达与目标位置点的位置关系及视觉单元与目标位置点的偏转方位角,计算导航雷达和视觉单元分别与正北方向的夹角;通过对视觉单元与正北方向的夹角进行优化,得到优化后的视觉单元观测偏转方位角。本发明能够高精度、高灵活性的对视觉单元观测方位进行测量。
技术研发人员:宫新一,刘梦雅,杨书航,封硕,贾建树
受保护的技术使用者:杭州涿溪脑与智能研究所
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!