一种巡检机器人全局路径规划方法及系统与流程
本发明涉及巡检机器人路径规划,具体涉及一种巡检机器人全局路径规划方法及系统。
背景技术:
1、全局路径规划算法属于旅行商(tsp)问题,即从某一城市出发,遍历所有需要去的城市,最后返回起点。对于巡检机器人来说就是从某一点出发,遍历所有待巡检的点,使得最终行走的路线最短。
2、目前效率最高的算法是贪婪法,但是该算法的缺点是很容易陷入局部最优路径,而并不是全局最优路径,优点是通过合理设置点的位置,可以使机器人的行走路径变的可控。其次还有经典的lkh算法等,该算法不一定得到最优解,而是近似最优解,缺点是机器人的实际行走轨迹不可控。
技术实现思路
1、发明目的:本发明目的在于针对现有技术的不足,提供一种巡检机器人全局路径规划方法及系统,当遇到孤立的分支路线时,优先巡检分支路线,能够获得比贪婪算法更优的巡检路径。
2、技术方案:本发明所述的巡检机器人全局路径规划方法,包括如下步骤:
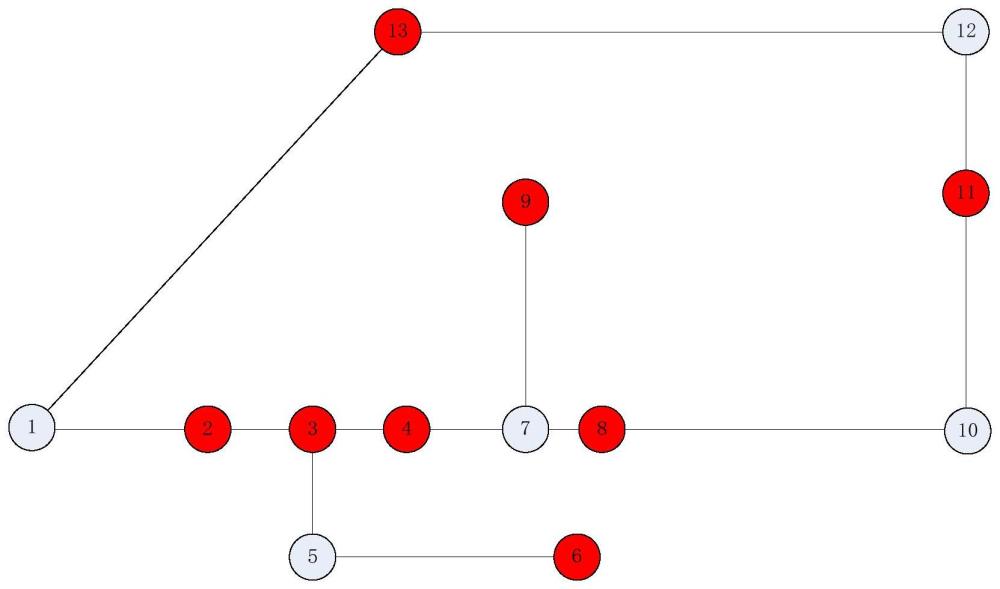
3、(1)从待巡检点的集合m中,找到孤立的分支点,孤立的分支点定义为仅与一个点相连的点;
4、(2)沿着孤立的分支点向上搜索,直到搜索到某个点,该点至少与3个点相连或者该点为路径规划起始点,将该点作为孤立分支的起始点,记录孤立分支的所有点,将孤立分支放入分支集合n;
5、(3)从巡检机器人的路径规划起始点或当前位置开始,从集合m中找到距离路径规划起始点或当前位置最近的巡检点,然后计算从路径规划起始点或当前位置到最近的巡检点经过的所有路径点,针对每个路径点,从孤立分支n中查找,是否存在某个孤立分支的起始点与路径点相同,如果存在,执行步骤(4),如果不存在,执行步骤(5);
6、(4)优先将该孤立分支的待巡检点放入路径规划的集合o中,然后将最近位置的巡检点放入o中,同时从集合m中删除该孤立分支的待巡检点和最近位置的巡检点,并以最近位置的巡检点为新的起始点,重复步骤(3);
7、(5)将最近位置的巡检点加入集合o中,同时从m中删除该最近位置的巡检点,并以该点为新的起始点,重复步骤(3),直至集合m为空,此时集合o为最终排序后的巡检点位。
8、进一步完善上述技术方案,所述步骤(3)中,从巡检机器人的当前位置开始,采用贪婪算法从集合m中找到距离当前位置最近的巡检点。
9、进一步地,所述步骤(3)中,采用迪杰斯特拉算法计算从当前位置到最近的巡检点经过的所有路径点。
10、进一步地,所述步骤(4)中将最近位置的巡检点放入集合o中之前,需判断集合o中是否已存在该点,若存在,从集合m中将该点删除。
11、进一步地,若要改变排序后的巡检点位形成的路径,通过增加巡检点控制巡检方向或巡检路线。
12、进一步地,获取当前位置到改变后巡检方向或巡检路线上最近的巡检点,采用贪婪算法计算需要增加的巡检点位置。
13、用于实现上述巡检机器人全局路径规划方法的系统,包括:巡检点模块,用于建立待巡检点集合m;孤立分支模块,用于建立分支集合n,所述分支集合n中每条孤立分支包括由孤立分支起始点至孤立的分支点上所有点,所述孤立的分支点是指待巡检点的集合m中仅与一个点相连的点;路径规划模块,用于建立路径规划集合o,所述建立过程包括:从巡检机器人的路径规划起始点或当前位置开始,从集合m中优先将属于孤立分支的巡检点放入集合o中,然后将最近位置的巡检点放入o中,同时从集合m中删除该孤立分支的待巡检点和最近位置的巡检点,直至集合m为空,此时集合o为最终排序后的巡检点位。
14、进一步地,所述优先将属于孤立分支的巡检点放入集合o中包括:从巡检机器人的路径规划起始点或当前位置开始,从集合m中找到距离路径规划起始点或当前位置最近的巡检点,然后计算从路径规划起始点或当前位置到最近的巡检点经过的所有路径点,针对每个路径点,从孤立分支n中查找,是否存在某个孤立分支的起始点与路径点相同,如果存在,优先将该孤立分支的待巡检点放入路径规划的集合o中,然后将最近位置的巡检点放入o中,同时从集合m中删除该孤立分支的待巡检点和最近位置的巡检点,并以最近位置的巡检点为新的起始点,如果不存在,将最近位置的巡检点加入集合o中,同时从m中删除该最近位置的巡检点,并以该点为新的起始点,重复上述过程,直至集合m为空。
15、进一步地,从巡检机器人的路径规划起始点或当前位置开始,从集合m中找到距离当前位置最近的巡检点采用贪婪算法实现;所述计算从当前位置到最近的巡检点经过的所有路径点采用采用迪杰斯特拉算法实现。
16、进一步地,还包括路径调整模块,所述路径调整模块获取当前位置到改变后巡检方向或巡检路线上最近的巡检点,采用贪婪算法计算需增加的巡检点位。
17、有益效果:与现有技术相比,本发明的优点在于:本发明中,孤立的分支点是指只与一个点相连的点,通过识别和利用孤立的分支点,结合贪婪算法和迪杰斯特拉算法,实现了一种高效且可控的巡检机器人全局路径规划方法。该方法通过在路径规划过程中优先考虑孤立分支,避免了贪婪算法容易陷入局部最优路径的缺点,同时获得了比贪婪算法更优的巡检路径。此外,本发明具备贪婪算法路径的可控性,可以通过插入点位,使到机器人按期望的路线巡检,以实现对巡检路线的人为控制。
技术特征:
1.一种巡检机器人全局路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的巡检机器人全局路径规划方法,其特征在于:所述步骤(3)中,从巡检机器人的路径规划起始点或当前位置开始,采用贪婪算法从集合m中找到距离当前位置最近的巡检点。
3.根据权利要求1所述的巡检机器人全局路径规划方法,其特征在于:所述步骤(3)中,采用迪杰斯特拉算法计算从路径规划起始点或当前位置到最近的巡检点经过的所有路径点。
4.根据权利要求1所述的巡检机器人全局路径规划方法,其特征在于:所述步骤(4)中将最近位置的巡检点放入集合o中之前,需判断集合o中是否已存在该点,若存在,从集合m中将该点删除。
5.根据权利要求1所述的巡检机器人全局路径规划方法,其特征在于:若要改变排序后巡检点位形成的路径,通过增加巡检点控制巡检方向或巡检路线。
6.根据权利要求5所述的巡检机器人全局路径规划方法,其特征在于:获取当前位置到改变后巡检方向或巡检路线上最近的巡检点,采用贪婪算法计算需要增加的巡检点位置。
7.一种巡检机器人全局路径规划系统,其特征在于,包括:
8.根据权利要求7所述的巡检机器人全局路径规划系统,其特征在于,所述优先将属于孤立分支的巡检点放入集合o中包括:从巡检机器人的路径规划起始点或当前位置开始,从集合m中找到距离路径规划起始点或当前位置最近的巡检点,然后计算从路径规划起始点或当前位置到最近的巡检点经过的所有路径点,针对每个路径点,从孤立分支n中查找,是否存在某个孤立分支的起始点与路径点相同,如果存在,优先将该孤立分支的待巡检点放入路径规划的集合o中,然后将最近位置的巡检点放入o中,同时从集合m中删除该孤立分支的待巡检点和最近位置的巡检点,并以最近位置的巡检点为新的起始点,如果不存在,将最近位置的巡检点加入集合o中,同时从m中删除该最近位置的巡检点,并以该点为新的起始点,重复上述过程,直至集合m为空。
9.根据权利要求8所述的巡检机器人全局路径规划系统,其特征在于:从巡检机器人的路径规划起始点或当前位置开始,从集合m中找到距离当前位置最近的巡检点采用贪婪算法实现;所述计算从当前位置到最近的巡检点经过的所有路径点采用采用迪杰斯特拉算法实现。
10.根据权利要求7所述的巡检机器人全局路径规划系统,其特征在于,还包括路径调整模块,所述路径调整模块获取当前位置到改变后巡检方向或巡检路线上最近的巡检点,采用贪婪算法计算需增加的巡检点位。
技术总结
本发明公开了巡检机器人全局路径规划方法及系统,包括:从待巡检点的集合M中,找到孤立的分支点;记录孤立分支的所有点,将孤立分支放入分支集合N;从巡检机器人的当前位置开始,然后计算从当前位置到最近的巡检点经过的所有路径点;针对每个路径点,是否存在某个孤立分支的起始点与路径点相同,如果存在,则将该孤立分支的待巡检点放入路径规划的集合O中,同时从集合M中删除;如果不存在,将最近位置的巡检点加入集合O中,同时从M中删除,并以该点为新起始点,重复该步骤,直至集合M为空,此时集合O为最终排序后的巡检点位。本发明在路径规划过程中优先考虑孤立分支,避免了贪婪算法容易陷入局部最优路径的缺点。
技术研发人员:宋强,刘爽,闵济海
受保护的技术使用者:南京天创电子技术有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!