一种无人车的传感器装置及无人车的制作方法
本发明涉及无人车、无人驾驶或自动驾驶,尤其涉及一种无人车的传感器装置及无人车。
背景技术:
1、为满足自动驾驶的安全性、可靠性和稳定性,相关技术中,无人车采用了多传感器融合技术,将各种传感器分布在车身不同位置不同角度,进行多层次、多空间、多维度的信息互补和优化组合处理,以达到远中近不同障碍物的全景探测,然后根据收集到的信息最终由中央处理器做出正确判断,进行相应的操作。然而,为避免对于障碍物的检测存在较大的盲区,导致识别准确度差而出现安全隐患的问题,通常布置过多数量的传感器,传感器单独设置在自动驾驶装置的车身上,设置分散,布线复杂,增加了布局、布线的难度和成本。
技术实现思路
1、本发明的目的在于提供一种无人车的传感器装置及无人车,在避免存在检测盲区的前提下,实现模块化和集成化设计,方便组装维护以及传感器标定,降低布局、布线难度,降低成本。
2、为达此目的,本发明采用以下技术方案:
3、一方面,提供一种无人车的传感器装置,包括:
4、架体组件,设于无人车的车身;
5、雷达组件,包括第一雷达和第二雷达,所述第一雷达设于所述架体组件的顶部,所述第二雷达设于所述架体组件的前侧且向下倾斜;
6、第一传感器组件,设于所述架体组件的周侧,用于对所述无人车的四周进行远程监控;
7、第二传感器组件,设于所述架体组件的周侧,用于对所述无人车的四周进行识别障碍物。
8、在一些可能的实施方式中,所述第一雷达为多线激光雷达;和/或,所述第二雷达为棱镜式激光雷达;和/或,所述第一传感器组件包括至少四个第一相机,分别设于所述架体组件的四周,所述第一相机为鱼眼相机;和/或,第二传感器组件包括至少四个第二相机,分别设于所述架体组件的四周,所述第二相机为环视感知相机。
9、在一些可能的实施方式中,所述架体组件的前侧、左侧和右侧分别设有至少两个所述第二相机,且位于所述架体组件的前侧的至少两个第二相机,其中一个为夜视摄像头,另一个为红绿灯摄像头。
10、在一些可能的实施方式中,所述第一传感器组件的所有所述第一相机和所述第二传感器组件的所有所述第二相机均位于同一水平线上。
11、在一些可能的实施方式中,所述第二雷达设于所述第一传感器组件和所述第二传感器组件的下侧,且所述第二雷达向下倾斜8°-18°。
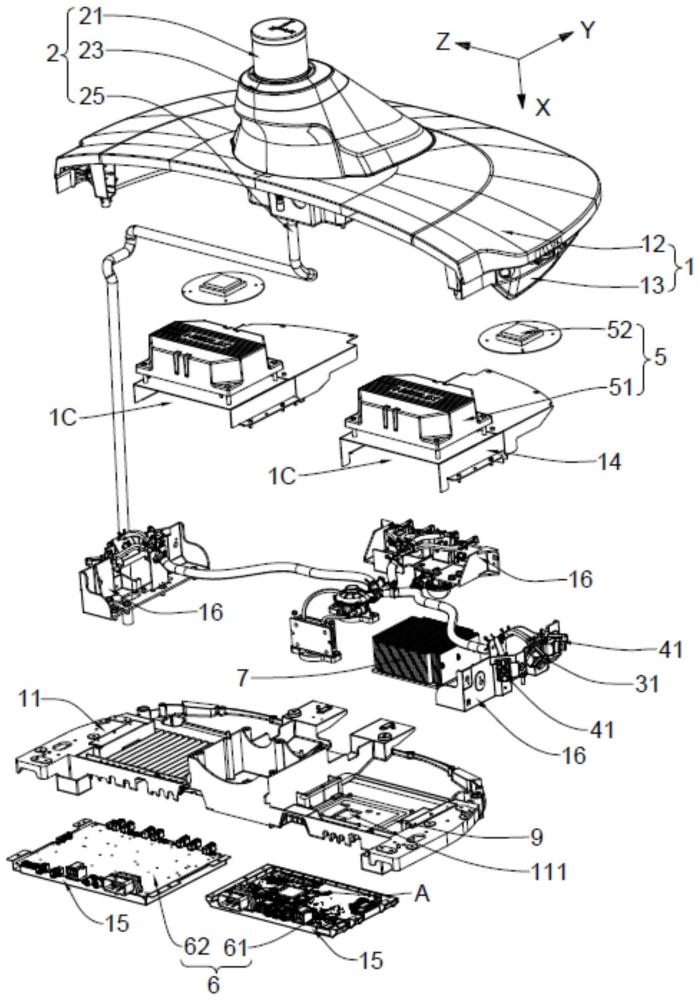
12、在一些可能的实施方式中,还包括天线组件和控制板组件,所述架体组件包括沿竖直方向间隔设置的主支架和第一盖板,二者形成容置腔,所述第一雷达设于所述第一盖板顶部,所述主支架用于与外界结构连接,所述第一传感器组件、所述第二传感器组件和所述第二雷达均设于所述容置腔,所述天线组件设于所述容置腔内,所述控制板组件设于所述主支架背离所述第一盖板的一侧,所述雷达组件、所述第一传感器组件、所述第二传感器组件和所述天线组件均与所述控制板组件通讯连接。
13、在一些可能的实施方式中,所述架体组件还包括安装支架和装饰板,所述安装支架设于所述主支架和所述第一盖板之间且所述装饰板定位安装于所述安装支架,所述第一相机、所述第二相机和所述第二雷达均定位安装于所述安装支架且通过所述装饰板上的第一避让孔裸露于外界。
14、在一些可能的实施方式中,所述安装支架包括多个基板部,基板部之间呈夹角设置,所述第一相机、所述第二相机和所述第二雷达一一对应安装于所述基板部。
15、在一些可能的实施方式中,所述容置腔带有开口,所述容置腔内设有风扇,所述装饰板开设有通风孔,所述通风孔、所述风扇和所述开口依次沿前后方向排布形成排风通道,所述控制板组件设于所述排风通道上且设于所述风扇和所述开口之间。
16、另一方面,提供一种无人车,包括如上述的无人车的传感器装置。
17、本发明的有益效果:
18、本发明提供的一种无人车的传感器装置及无人车,一方面,雷达组件、第一传感器组件和第二传感器组件集成安装于架体组件上,避免分散安装,实现了集成化和模块化设计,方便生产组装、后期维护以及传感器标定。另一方面,通过位于顶部的第一雷达,用于探测无人车四周的障碍物,即第一区域内的障碍物,第一区域主要是左右两侧区域、后侧区域,以及距离无人车前方预设距离l以外的区域。通过位于前侧向下倾斜设置的第二雷达,用于探测无人车前方预设距离l以内的区域的障碍物,即第二区域内的障碍物,从而第一雷达和第二雷达互为补充,第二雷达补充第一雷达前侧探测范围,消除第一雷达的盲区,提升检测的全面性和可靠性,结构简单、合理。第一传感器组件用于实现远程驾驶和自动驾驶情况下的远程监控,第二传感器组件用于实现自动驾驶情况下识别障碍物。雷达组件、第一传感器组件和第二传感器组件互为补充,实现了360°双重且无死角的探测感知,识别准确性好,冗余度高,安全可靠性好,提高了无人车的运行效率,并且简化布局、布线,降低了布局、布线的难度和成本。
技术特征:
1.一种无人车的传感器装置,其特征在于,包括:
2.根据权利要求1所述的无人车的传感器装置,其特征在于,所述第一雷达(21)为多线激光雷达;和/或,所述第二雷达(22)为棱镜式激光雷达;和/或,所述第一传感器组件(3)包括至少四个第一相机(31),分别设于所述架体组件(1)的四周,所述第一相机(31)为鱼眼相机;和/或,第二传感器组件(4)包括至少四个第二相机(41),分别设于所述架体组件(1)的四周,所述第二相机(41)为环视感知相机。
3.根据权利要求2所述的无人车的传感器装置,其特征在于,所述架体组件(1)的前侧、左侧和右侧分别设有至少两个所述第二相机(41),且位于所述架体组件(1)的前侧的至少两个第二相机(41),其中一个为夜视摄像头,另一个为红绿灯摄像头。
4.根据权利要求2所述的无人车的传感器装置,其特征在于,所述第一传感器组件(3)的所有所述第一相机(31)和所述第二传感器组件(4)的所有所述第二相机(41)均位于同一水平线上。
5.根据权利要求1所述的无人车的传感器装置,其特征在于,所述第二雷达(22)设于所述第一传感器组件(3)和所述第二传感器组件(4)的下侧,且所述第二雷达(22)向下倾斜8°-18°。
6.根据权利要求2-4任一项所述的无人车的传感器装置,其特征在于,还包括天线组件(5)和控制板组件(6),所述架体组件(1)包括沿竖直方向间隔设置的主支架(11)和第一盖板(12),二者形成容置腔(1a),所述第一雷达(21)设于所述第一盖板(12)顶部,所述主支架(11)用于与外界结构连接,所述第一传感器组件(3)、所述第二传感器组件(4)和所述第二雷达(22)均设于所述容置腔(1a),所述天线组件(5)设于所述容置腔(1a)内,所述控制板组件(6)设于所述主支架(11)背离所述第一盖板(12)的一侧,所述雷达组件(2)、所述第一传感器组件(3)、所述第二传感器组件(4)和所述天线组件(5)均与所述控制板组件(6)通讯连接。
7.根据权利要求6所述的无人车的传感器装置,其特征在于,所述架体组件(1)还包括安装支架(16)和装饰板(13),所述安装支架(16)设于所述主支架(11)和所述第一盖板(12)之间且所述装饰板(13)定位安装于所述安装支架(16),所述第一相机(31)、所述第二相机(41)和所述第二雷达(22)均定位安装于所述安装支架(16)且通过所述装饰板(13)上的第一避让孔裸露于外界。
8.根据权利要求7所述的无人车的传感器装置,其特征在于,所述安装支架(16)包括多个基板部(161),基板部(161)之间呈夹角设置,所述第一相机(31)、所述第二相机(41)和所述第二雷达(22)一一对应安装于所述基板部(161)。
9.根据权利要求7所述的无人车的传感器装置,其特征在于,所述容置腔(1a)带有通风口(1b),所述容置腔(1a)内设有风扇(17),所述装饰板(13)开设有通风孔(1321),所述通风孔(1321)、所述风扇(17)和所述通风口(1b)依次沿前后方向排布形成排风通道,所述控制板组件(6)设于所述排风通道上且设于所述风扇(17)和所述通风口(1b)之间。
10.一种无人车,其特征在于,包括如权利要求1-9任一项所述的无人车的传感器装置。
技术总结
本发明公开了一种无人车的传感器装置及无人车,属于无人车、无人驾驶或自动驾驶技术领域。无人车的传感器装置包括设于无人车的车身的架体组件、雷达组件以及均设于架体组件的周侧的第一传感器组件和第二传感器组件,雷达组件包括第一雷达和第二雷达,第一雷达设于架体组件的顶部,第二雷达设于架体组件的前侧且向下倾斜;第一传感器组件用于对无人车的四周进行远程监控;第二传感器组件用于对无人车的四周进行识别障碍物。本发明的无人车的传感器装置及无人车,在避免存在检测盲区的前提下,实现模块化和集成化设计,方便组装维护以及传感器标定,降低布局、布线难度,降低成本。
技术研发人员:刘庆贺
受保护的技术使用者:新石器中研(上海)科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!