一种基于单靶标与双相机的运动体坐标测量方法与流程
本发明涉及光学定位测量领域,具体而言,涉及一种基于单靶标与双相机的运动体坐标测量方法。
背景技术:
1、常见的光学测量方法主要是利用激光良好的方向性进行测距;或者是利用光速不变原理与光反射时间差进行测距;以及采用光的干涉原理进行激光干涉测距法。但随着计算机图像技术发展以及普通照相机以及工业照相机性能的进一步提高,使得采用可见光与相机匹配组成成本低廉而又可靠实用的光学定位测距系统成为可能,而且随着技术的发展其,其应用场景也越来越多;如多无人机之间的光学组网定位与通信;停车场的车辆识别、速度测量、停车定位与管理等等。基于上述背景原因,本发明提出了一种采用液晶光阀形成主动发光的靶标固定于运动体,然后与两个工业相机组成一套运动体光学定位解算的方法,具有良好的理论创新性,而且还有很高的市场经济价值与工程实用价值。
2、需要说明的是,在上述背景技术部分发明的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种基于单靶标与双相机的运动体坐标测量方法,进而克服了由于相关技术限制而导致的运动体定位快速定位解算困难以及精度不高的问题。
2、根据本发明的一个方面,提供一种基于单靶标与双相机的运动体坐标测量方法,包括以下五个步骤:
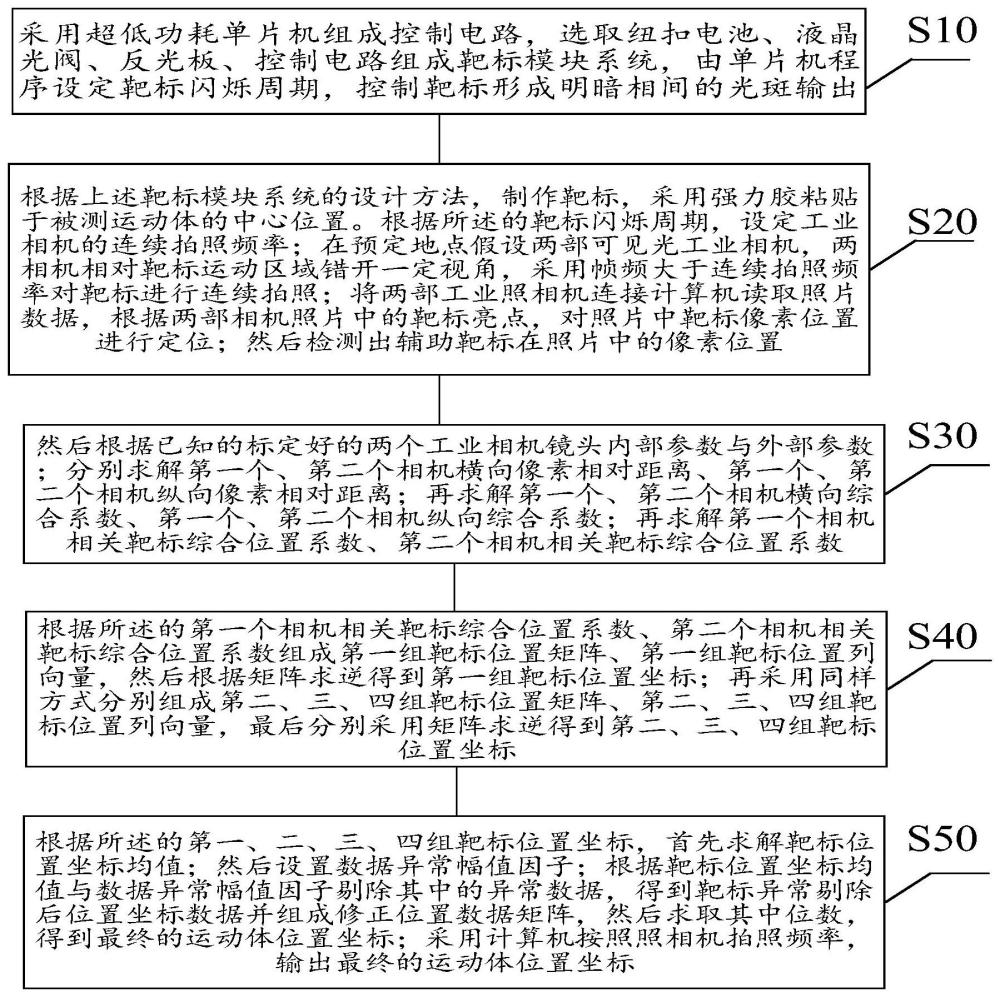
3、步骤s10,采用超低功耗单片机组成控制电路,选取纽扣电池、液晶光阀、反光板、控制电路组成靶标模块系统,由单片机程序设定靶标闪烁周期,控制靶标形成明暗相间的光斑输出。
4、步骤s20,根据上述靶标模块系统的设计方法,制作靶标,采用强力胶粘贴于被测运动体的中心位置。根据所述的靶标闪烁周期,设定工业相机的连续拍照频率;在预定地点架设两部可见光工业相机,两相机相对靶标运动区域错开一定视角,采用帧频大于连续拍照频率对靶标进行连续拍照;将两部工业照相机连接计算机读取照片数据,根据两部相机照片中的靶标亮点,对照片中靶标像素位置进行定位;然后检测出靶标在照片中的像素位置。
5、步骤s30,然后根据已知的标定好的两个工业相机镜头内部参数与外部参数;分别求解第一个、第二个相机横向像素相对距离、第一个、第二个相机纵向像素相对距离;再求解第一个、第二个相机横向综合系数、第一个、第二个相机纵向综合系数;再求解第一个相机相关靶标综合位置系数、第二个相机相关靶标综合位置系数。
6、步骤s40,根据所述的第一个相机相关靶标综合位置系数、第二个相机相关靶标综合位置系数组成第一组靶标位置矩阵、第一组靶标位置列向量,然后根据矩阵求逆得到第一组靶标位置坐标;再采用同样方式分别组成第二、三、四组靶标位置矩阵、第二、三、四组靶标位置列向量,最后分别采用矩阵求逆得到第二、三、四组靶标位置坐标。
7、步骤s50,根据所述的第一、二、三、四组靶标位置坐标,首先求解靶标位置坐标均值;然后设置数据异常幅值因子;根据靶标位置坐标均值与数据异常幅值因子剔除其中的异常数据,得到靶标异常剔除后位置坐标数据并组成修正位置数据矩阵,然后求取其中位数,得到最终的运动体位置坐标;采用计算机按照照相机拍照频率,输出最终的运动体位置坐标。
8、进一步的,靶标模块系统由液晶光阀(含反光板,纽扣电池)、控制电路板组成。液晶光阀和控制电路板采用挠性连接,且液晶光阀在控制电路板的下侧,其详细组成与机械尺寸见后文具体实施方式。
9、进一步的,控制电路板控制液晶光阀明暗间断光斑输出的方式为:根据液晶光闸的特性,将液晶光闸的电源输入端设置为高电平,在需要形成光斑的时刻设置低电平,并维持一段时间,就形成了类似主动发光式的频闪光斑。
10、在本发明的一种示例实施例中,将第一部工业相机拍照得到的靶标在照片中像素位置记作(u1i,v1i),其中i为整数,代表t=ti时,靶标在第一部相机照片中像素位置,将第二部工业相机拍照得到的靶标在照片中像素位置记作(u2i,v2i),也就是(u2i,v2i)代表t=ti时,靶标在第二部相机照片中像素位置,其中t为相机连续拍照的间隔周期。
11、在本发明的一种示例实施例中,根据已知的标定好的两个工业相机镜头内部参数与外部参数;分别求解第一个、第二个相机横向像素相对距离、第一个、第二个相机纵向像素相对距离;第一个、第二个相机横向综合系数、第一个、第二个相机纵向综合系数;再求解第一个相机相关靶标综合位置系数、第二个相机相关靶标综合位置系数包括:
12、ma1i=(u1i-u10);
13、na1i=(v1i-v10);
14、ma2i=(u2i-u20);
15、na2i=(v2i-v20);
16、
17、
18、g11i=ma1ir131-m1r111;
19、g12i=ma1ir132-m1r112;
20、g13i=ma1ir133-m1r113;
21、g14i=-ma1it113+m1t111;
22、g15i=n1air131-n1r121;
23、g16i=n1air132-n1r122;
24、g17i=n1air133-n1r123;
25、g18i=-n1ait13+n1t12;
26、g21i=ma2ir231-m2r211;
27、g22i=ma2ir232-m2r212;
28、g23i=ma2ir233-m2r213;
29、g24i=-ma2it213+m2t211;
30、g25i=n2air231-n2r221;
31、g26i=n2air232-n2r222;
32、g27i=n2air233-n2r223;
33、g28i=-n2ait23+n2t22;
34、其中f1、f2分别为第一个、第二个相机焦距,cx1、cy1为为第一个照片x向与y向每个像素的实际物理尺寸参数,cx2、cy2为第二个照片x向与y向每个像素的实际物理尺寸参数,u10、v10表示第一个相机的图像坐标系的中心在像素坐标系的像素位置横坐标与纵坐标;u20、v20表示第二个相机的图像坐标系的中心在像素坐标系的像素位置横坐标与纵坐标;上述十个参数为相机的内部参数,可以通过相机厂家获取,也可通过自行测量标定获得,在此不再累述其获得过程。m1、m2为第一个、第二个相机横向综合系数、n1、n2为第一个、第二个相机纵向综合系数。ma1i、ma2i为第一个、第二个相机横向像素相对距离、na1i、na2i为第一个、第二个相机纵向像素相对距离。t11,t12,t13为第一个相机的相机坐标系与世界坐标系之间的三个轴向平移参数;t21,t22,t23为第二个相机的相机坐标系与世界坐标系之间的三个轴向平移参数;r111,r112,r113,r121,r122,r123,r131,r132,r133为第一个相机的九个旋转参数,r211,r212,r213,r221,r222,r223,r231,r232,r233为第二个相机的九个旋转参数,上述24个参数为相机的外部参数,可以通过自行测量与标定获得,由于相关的通用标定方法很多,也不是本发明关注保护的内容,在此不再累述。g11i、g12i、g13i、g14i、g15i、g16i、g17i、g18i为第一个相机相关靶标综合位置系数;g21i、g22i、g23i、g24i、g25i、g26i、g27i、g28i为第二个相机相关靶标综合位置系数。
35、在本发明的一种示例实施例中,根据所述的第一个相机相关靶标综合位置系数、第二个相机相关靶标综合位置系数组成第一组靶标位置矩阵、第一组靶标位置列向量,然后根据矩阵求逆得到第一组靶标位置坐标;再采用同样方式分别组成第二、三、四组靶标位置矩阵、第二、三、四组靶标位置列向量,最后分别采用矩阵求逆得到第二、三、四组靶标位置坐标包括:
36、
37、
38、
39、
40、其中a1i为第一组靶标位置矩阵、b1i为第一组靶标位置列向量;c1i为第一组靶标位置坐标;表示矩阵a1i取左逆运算,如果a1i的左逆不存在,则选取c1i=c1,i-1,其它左逆运算不存在情况同样处理。a2i为第二组靶标位置矩阵、b2i为第二组靶标位置列向量;c2i为第二组靶标位置坐标;a3i为第三组靶标位置矩阵、b3i为第三组靶标位置列向量;c3i为第四组靶标位置坐标;a4i为第四组靶标位置矩阵、b4i为第四组靶标位置列向量;c4i为第四组靶标位置坐标。
41、在本发明的一种示例实施例中,根据所述的第一、二、三、四组靶标位置坐标,首先求解靶标位置坐标均值;然后设置数据异常幅值因子;根据靶标位置坐标均值与数据异常幅值因子剔除其中的异常数据,得到靶标异常剔除后位置坐标数据并组成修正位置数据矩阵,然后求取其中位数,得到最终的运动体位置坐标包含:
42、
43、如果(1-r)cei<cji<(1+r)cei,dji=cji,否则dji为空元素;
44、fi=[d1i,d2i,d3i,d4i]或fi=[d1i,d2i,d3i]或fi=[d1i,d2i]或fi=[d1i]或fi=[];
45、gi=[c1i,c2i,c3i,c4i];
46、如果fi=[],则ei=median(gi);
47、如果fi≠[],则ei=median(fi);
48、其中cei为靶标位置坐标均值;r为数据异常幅值因子,dji为靶标异常剔除异常数据后位置数据;fi为修正位置数据矩阵;gi为原始位置数据矩阵。median()求取其中位数的函数,gi为最终的运动体位置坐标,其为三维坐标,依次分别为相机世界坐标系的x、y、z三个方向坐标。
49、最后,采用计算机按照照相机拍照频率,输出最终的运动体位置坐标,完成采用双相机与靶标组成的运动体空间光学定位连续测量解算,实现运动体的光学高精度定位。
50、有益效果
51、本发明提供了一种基于单靶标与双相机的运动体坐标测量方法,其主要创新点有如下两点。
52、第一是提出了一种采用单个靶标与双相机对运动体进行光学高精度定位的系统架构方法,该方法能够自然推广扩展到多靶标、多运动体的光学同时定位中,也就是采用两个相机,然后在多个运动体上,每个运动固定一个靶标,进可对多运动体的运动信息,也就是位置信息进行同时光学测量。由于光学测量具有其独特的优势,因此该方法具有独特的市场价值。而且很容易推广到其它运动场景,也能应用于静止不动场景的定位测量。而且靶标的价格低廉,因此该方法推广应用后具有很高的经济价值。
53、第二是提出了一种采用单个靶标与双相机对运动体实时定位解算的配套算法,得到了四个定位解,然后对其进行数据处理,得到可行度以及精度最高的最终运动体位置坐标。该解算方法具有实施简单操作方便的优点,从而能够满足高速运动体解算的实时性快速性高频解算需求。
54、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!